

通信学报 ›› 2019, Vol. 40 ›› Issue (8): 102-113.doi: 10.11959/j.issn.1000-436x.2019098
裴家正,黄勇( ),董云龙,陈小龙
),董云龙,陈小龙
修回日期:2019-05-25
出版日期:2019-08-25
发布日期:2019-08-30
作者简介:裴家正(1994- ),男,河南郑州人,海军航空大学博士生,主要研究方向为检测前跟踪。|黄勇(1979- ),男,湖南汨罗人,博士,海军航空大学副教授,主要研究方向为雷达信号处理。|董云龙(1974- ),男,天津人,海军航空大学副研究员,主要研究方向为雷达组网、多传感器信息融合。|陈小龙(1985- ),男,山东烟台人,博士,海军航空大学副教授,主要研究向为智能雷达信号处理、动目标检测、杂波抑制等。
基金资助:
Jiazheng PEI,Yong HUANG(),Yunlong DONG,Xiaolong CHEN
Revised:2019-05-25
Online:2019-08-25
Published:2019-08-30
Supported by:摘要:
针对在雷达观测下机动弱小目标的检测前跟踪(TBD)问题中,基于序贯蒙特卡洛的势均衡多伯努利检测前跟踪(SMC-CBMeMBer-TBD)算法存在目标的数目估计不准确及状态估计精度随时间下降的问题,提出了一种基于SMC-CBMeMBer前向后向平滑检测前跟踪的改进算法。该算法在预测和更新过程之间加入多目标粒子群优化算法(MOPSO),基于观测值设置适应度目标函数,使粒子集群向后验概率密度较为集中的位置分布,缓解了粒子贫乏的问题;在更新步骤之后加入平滑递归方法,利用观测值平滑滤波值,算法运算时间虽有一定延长,但获得了数目和状态估计精度的提升。仿真实验表明,与CBMeMBer-TBD方法相比,所提算法在对机动目标数目估计和目标状态估计的准确度等性能上都有所改进。
中图分类号:
裴家正,黄勇,董云龙,陈小龙. 改进的SMC-CBMeMBer前向后向平滑检测前跟踪算法[J]. 通信学报, 2019, 40(8): 102-113.
Jiazheng PEI,Yong HUANG,Yunlong DONG,Xiaolong CHEN. Improved SMC cardinality-balanced multi-Bernoulli forwardbackward smoothing track-before-detect algorithm[J]. Journal on Communications, 2019, 40(8): 102-113.

图1
改进的势均衡多伯努利平滑滤波器平滑滤波的过程"
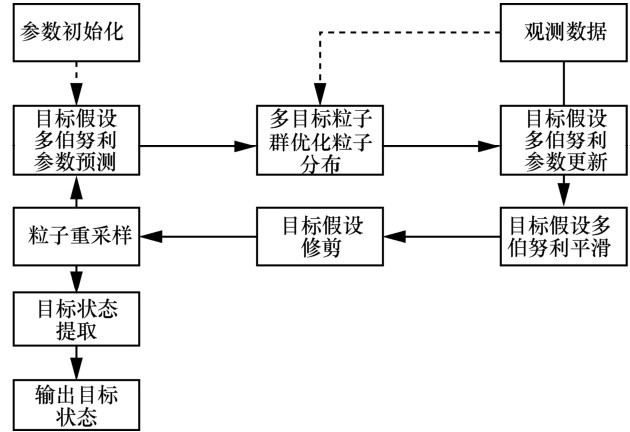
表1
目标初始状态及其起止时刻"
| 目标序号 | 初始时刻/s | 终止时刻/s | 初始状态/[m,m.s-1,m,m.s-1,rad.s-1,-] |
| 1 | 1 | 100 | 1 000,-10,1 500,-10, |
| 2 | 10 | 70 | -250,20,1 000,3,- |
| 3 | 20 | 80 | -250,11,750,5, |
| 4 | 40 | 100 | -500,-12,1 000,-12,- |
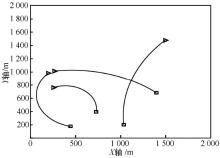
图2
目标真实的运动状态"
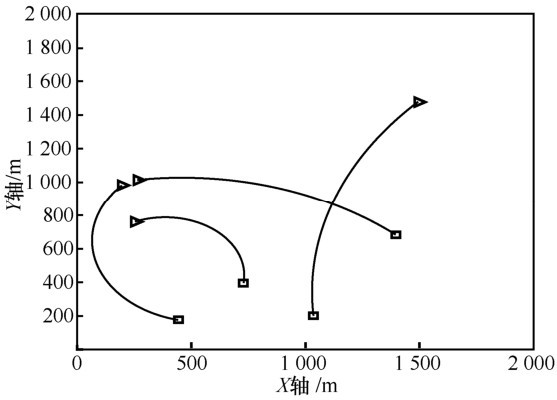

图3
3种算法在不同信噪比场景下的目标数目(PD=0.98)"
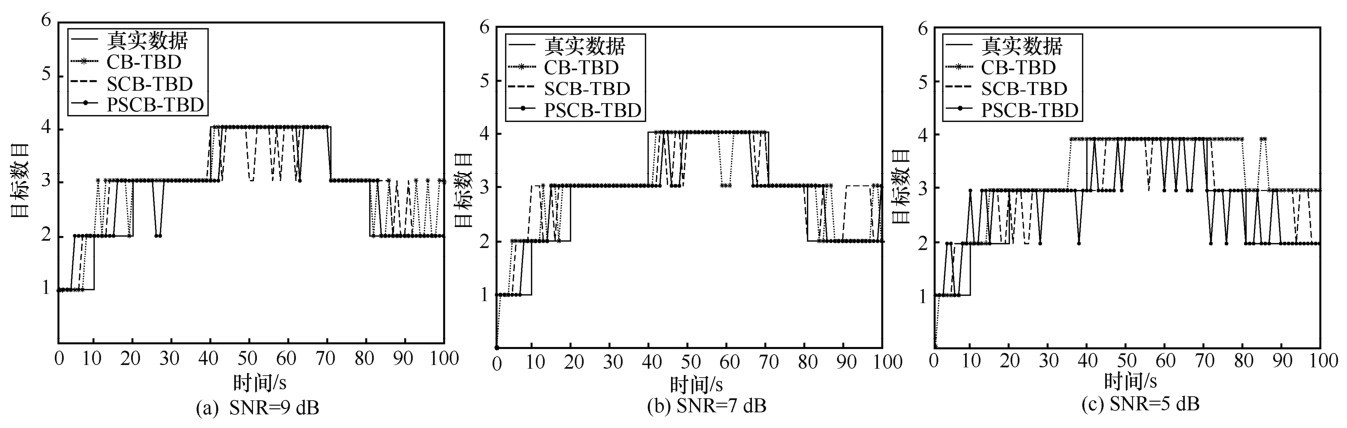

图4
目标数目估计的标准差分布(PD=0.98)"


图5
OSPA距离分布(PD=0.98)"
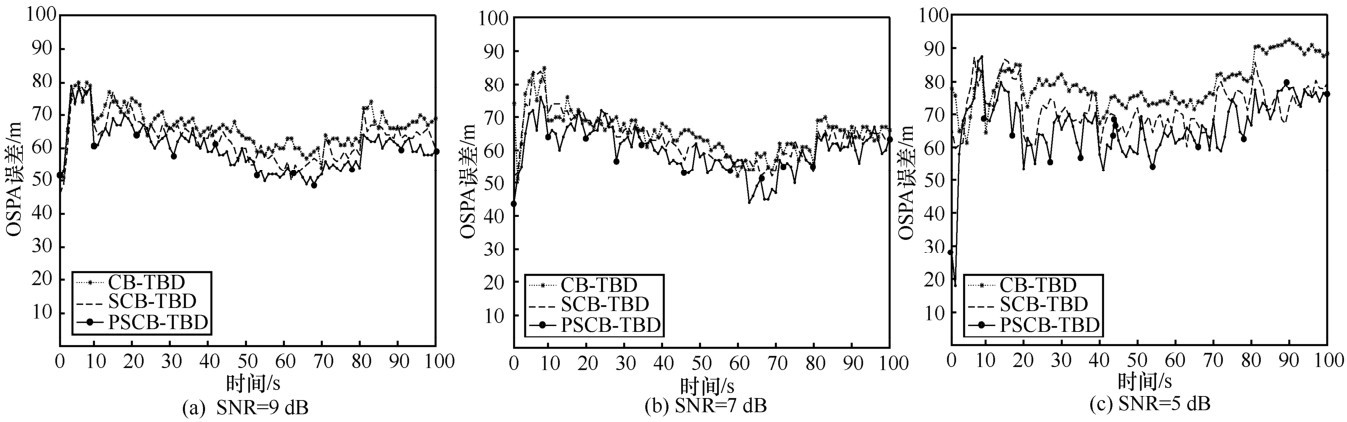

图6
3种算法在不同信噪比场景下的目标数目(PD=0.95)"
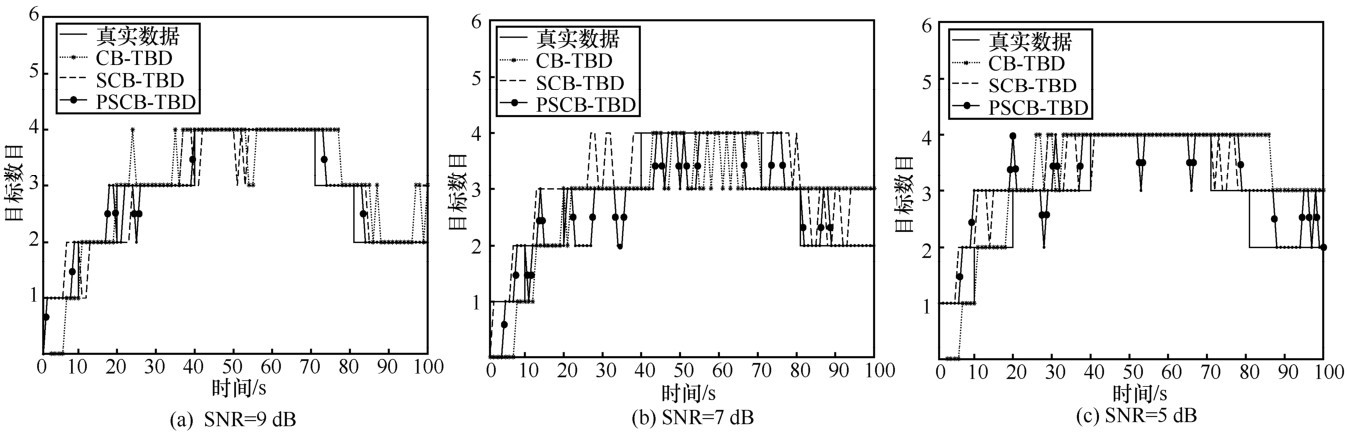
图7
目标数目估计标准差分布(PD=0.95)"
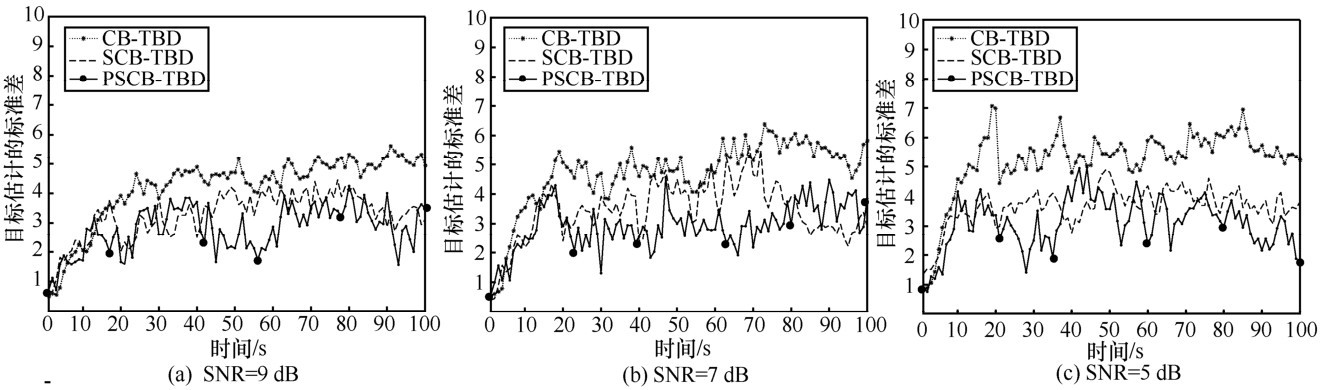
图8
OSPA距离分布(PD=0.95)"
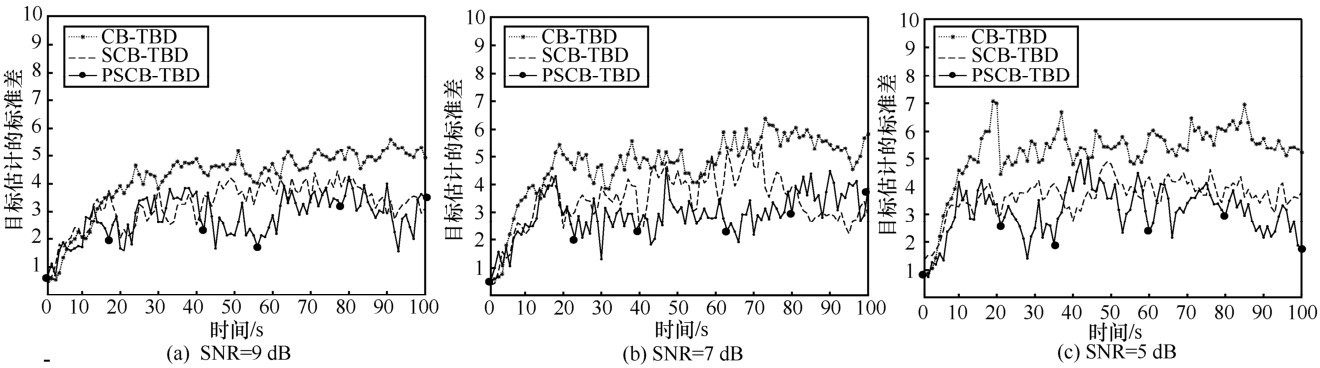

图9
3种算法在不同信噪比场景下的目标数目(PD=0.90)"
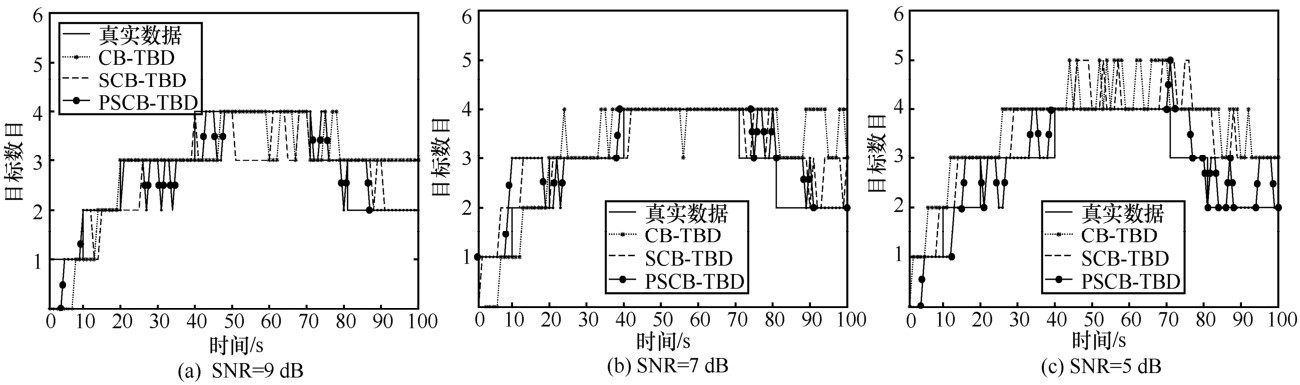

图10
目标数目估计标准差分布(PD=0.90)"


图11
OSPA距离分布(PD=0.90)"

表2
3种算法在不同信噪比和检测概率下的标准差与OSPA误差均值"
| 信噪比 | 算法 | 标准差均值 | OSPA均值/m | |||||
| PD=0.98 | PD=0.95 | PD=0.90 | PD=0.98 | PD=0.95 | PD=0.90 | |||
| CB-TBD | 3.03 | 4.22 | 6.29 | 65.10 | 73.43 | 78.28 | ||
| 9 dB | SCB-TBD | 2.68 | 3.25 | 4.36 | 62.98 | 66.71 | 71.40 | |
| PSCB-TBD | 2.22 | 2.79 | 3.33 | 59.77 | 60.82 | 62.95 | ||
| CB-TBD | 3.11 | 4.47 | 6.74 | 66.25 | 76.44 | 79.20 | ||
| 7 dB | SCB-TBD | 2.71 | 3.45 | 4.70 | 63.64 | 69.59 | 73.80 | |
| PSCB-TBD | 2.31 | 2.92 | 3.65 | 59.89 | 65.68 | 66.39 | ||
| CB-TBD | 4.01 | 5.24 | 6.87 | 73.08 | 81.69 | 84.76 | ||
| 5 dB | SCB-TBD | 3.09 | 3.66 | 5.37 | 69.40 | 73.86 | 77.20 | |
| PSCB-TBD | 2.82 | 3.09 | 3.87 | 67.76 | 70.65 | 74.56 | ||
| [1] | 蒋鹏, 宋华华, 林广 . 基于粒子群优化和M-H抽样粒子滤波的传感器网络目标跟踪方法[J]. 通信学报, 2013,34(11): 8-17. |
| JIANG P , SONG H H , LIN G . Target tracking algorithm for wireless sensor networks based on particle swarm optimization and metropo-lis-hasting sampling particle filter[J]. Journal on Communications, 2013,34(11): 8-17. | |
| [2] | 戴江安, 邱天爽 . 基于检测前跟踪的声源跟踪算法[J]. 通信学报, 2017,38(2): 67-73. |
| DAI J A , QIU T S . Acoustic source tracking algorithm using track before detect[J]. Journal on Communications, 2017,38(2): 67-73. | |
| [3] | MAHLER R . Statistical multisource-multitarget information fusion[M]. Boston: Artech HousePress, 2007. |
| [4] | MAHLER R . Multitarget Bayes filtering via first-order multitarget moments[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003,39(4): 1152-1178. |
| [5] | MAHLER R . PHD filters of higher order in target number[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007,43(4): 1523-1543. |
| [6] | 王慧斌, 陈哲, 王鑫 ,等. 基于随机有限集的UPF-CPHD多目标跟踪[J]. 通信学报, 2012,33(12): 147-153. |
| WANG H B , CHEN Z , WANG X ,et al. Random finite sets based UPF-CPHD multi-object tracking[J]. Journal on Communications, 2012,33(12): 147-153. | |
| [7] | VO B T , VO B N , CAMTONI A . Bayesian filtering with random finite set observations[J]. IEEE Transactions on Signal Processing, 2018,56(4): 1313-1326. |
| [8] | VO B T , VO B N , CANTONI A . The cardinality balanced multi-target multi-Bernoulli filter and its implement[J]. IEEE Transactions on Signal Processing, 2009,57(2): 409-423. |
| [9] | 朱红鹏, 黄勇, 修建娟 ,等. 基于GM-PHD平滑器的检测前跟踪技术[J]. 雷达科学与技术, 2016,14(6): 648-653. |
| ZHU H P , HUANG Y , XIU J J ,et al. Track-before-detect algorithm using GM-PHD smoothing filter[J]. Radar Science and Technology, 2016,14(6): 648-653. | |
| [10] | VO B T , CLARK D , VO B N ,et al. Bernoulli forward-backward smoothing for joint target detection and tracking[J]. IEEE Transactions on Signal Processing, 2011,59(9): 4473-4477. |
| [11] | WONG S , VO B T , PAPI F . Bernoulli forward-backward smoothing for track-before-detect[J]. IEEE Signal Processing Letters, 2014,21(6): 727-731. |
| [12] | VO B T , SEE C M , MA N ,et al. Multi-sensor joint detection and tracking with the Bernoulli filter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012,48(2): 1385-1402. |
| [13] | 孙杰, 李冬 . 多目标的多伯努利平滑方法[J]. 数字通信, 2014,41(2): 8-11. |
| SUN J , LI D . Multi-Bernoulli smoother for multi-target tracking[J]. Digital Communication, 2014,41(2): 8-11. | |
| [14] | WONG J , VO B T , VO B N ,et al. Multi-Bernoulli based track-before-detect with road constraints[C]// International Conference on Information Fusion. IEEE, 2012: 840-846. |
| [15] | 柳超, 关键, 黄勇 ,等. 基于PHD的多目标检测前跟踪改进方法[J]. 雷达科学与技术, 2016,14(1): 1-6. |
| LIU C , GUAN J , HUANG Y ,et al. An improved multitarget track-before-detect algorithm based on probability hypothesis density filter[J]. Radar Science and Technology, 2016,14(1): 1-6. | |
| [16] | 占荣辉, 刘盛启, 欧建平 ,等. 基于序贯蒙特卡罗概率假设密度滤波的多目标检测前跟踪改进算法[J]. 电子与信息学报, 2014,36(11): 2593-2598. |
| ZHAN R H , LIU S Q , OU J P ,et al. Improved multitarget track before detect algorithm using the sequential Monte Carlo probability hypoth-esis density filter[J]. Journal of Electronics & Information Technology, 2014,36(11): 2593-2598. | |
| [17] | 林再平, 周一宇, 安玮 ,等. 基于概率假设密度滤波平滑器的检测前跟踪算法[J]. 光学学报, 2012,32(10): 124-131. |
| LIN Z P , ZHOU Y Y , AN W ,et al. Track-before-detect algorithm based on probability hypothesis density smoother[J]. Acta Optica Sinica, 2012,32(10): 124-131. | |
| [18] | 李宁 . 基于 MeMBer 滤波器的弱小目标检测前跟踪方法研究[D]. 西安:西安电子科技大学, 2015. |
| LI N . Research on tracking before detection algorithms of dim-small targets based on MeMBer filter[D]. Xi’an:Xidian University, 2015. | |
| [19] | 曹潇男 . 基于随机有限集理论的检测前跟踪方法研究[D]. 西安:西安电子科技大学, 2014. |
| CAO X N . Study of tracking before detection based on random finite set theory[D]. Xi’an:Xidian University, 2014. | |
| [20] | YANG C Q , SHI Z G , HAN K ,et al. Optimization of particle CBMeMBer filters for hardware implement[J]. IEEE Transections on Vehicular Technology, 2018,PP(99):1. |
| [21] | LIU J S , CHEN R , LOGVINENKO T . A theoretical framework for sequential importance sampling with resampling[M]// Sequential Monte Carlo Methods in Practice. New York:Springer , 2001. |
| [22] | 方正, 佟国锋, 徐心和 . 粒子群优化粒子滤波方法[J]. 控制与决策, 2007,22(3): 273-277. |
| FANG Z , TONG G F , XU X H . Particle swarm optimized particle filter[J]. Control and Decision, 2007,22(3): 273-277. | |
| [23] | KENNEDY J , EBERHART R . Particle swarm optimization[C]// IEEE International Conference on Neural Networks. IEEE, 1995: 1941-1948. |
| [24] | 汲清波, 耿丽群, 任超 . 高斯粒子群优化粒子滤波的检测前跟踪算法[J]. 计算机工程与应用, 2014,50(17): 205-209. |
| JI Q B , GENG L Q , REN C . Track before detect algorithm based on Gaussian particle swarm optimiza-tion particle filter[J]. Computer En-gineering and Applications, 2014,50(17): 205-209. | |
| [25] | 余晓东, 雷英杰, 岳韶华 ,等. 基于粒子群优化的直觉模糊核聚类算法研究[J]. 通信学报, 2015,36(5): 74-80. |
| YU X D , LEI Y J , YUE S H ,et al. Research on PSO-based intuition-istic fuzzy kernel clustering algorithm[J]. Journal on Communications, 2015,36(5): 74-80. | |
| [26] | 康岚兰, 董文永, 宋婉娟 ,等. 无惯性自适应精英变异反向粒子群忧化算法[J]. 通信学报, 2017,38(8): 66-78. |
| KANG L L , DONG W Y , SONG W J ,et al. Non-inertial opposi-tion-based particle swarm optimization with adaptive elite mutation[J]. Journal on Communications, 2017,38(8): 66-78. | |
| [27] | DEB K , PRATAP A , AGARWAL S ,et al. A fast and elitist multi-objective genetic algorithm:NSGA-II[J]. IEEE Transactions on Evolutionary Computation, 2002,6(2): 182-197. |
| [28] | LI H , ZHANG Q . Multiobjective optimization problems with complicated Pareto sets,MOEA/D and NSGA-II[J]. IEEE Transactions on Evolutionary Computation, 2009,13(2): 284-302. |
| [29] | VO B N , VO B T , PHAM N T ,et al. Joint detection and estimation of multiple objects from image observations[J]. IEEE Transactions on Signal Processing, 2010,58(10): 5129-5241. |
| [30] | RISTIC B , VO B N , CLARK D ,et al. A metric for performance evaluation of multi-target tracking algorithms[J]. IEEE Transactions on Signal Processing, 2011,59(7): 3452-3457. |
| [1] | 赵庶旭, 韦萍, 王小龙. 多任务并发边缘计算环境中最优联盟结构生成策略[J]. 通信学报, 2023, 44(2): 172-184. |
| [2] | 李翠然, 王雪洁, 谢健骊, 吕安琪. 基于改进PSO的铁路监测线性无线传感器网络路由算法[J]. 通信学报, 2022, 43(5): 155-165. |
| [3] | 尹安琪, 郭渊博, 汪定, 曲彤洲, 陈琳. 可证明安全的抗量子两服务器口令认证密钥交换协议[J]. 通信学报, 2022, 43(3): 14-29. |
| [4] | 曹阳, 钟烨, 彭醇陵, 彭小峰. 基于混合供能和能量协作的异构网络能量效率优化算法[J]. 通信学报, 2022, 43(3): 135-147. |
| [5] | 毛伊敏, 甘德瑾, 廖列法, 陈志刚. 基于Spark框架和ASPSO的并行划分聚类算法[J]. 通信学报, 2022, 43(3): 148-163. |
| [6] | 王洪雁, 张莉彬, 陈国强, 汪祖民, 管志远. 结合粒子滤波及度量学习的目标跟踪方法[J]. 通信学报, 2021, 42(5): 98-110. |
| [7] | 苏新, 薛淏阳, 周一青, 朱金秀. 面向海洋观监测传感网的计算卸载方法研究[J]. 通信学报, 2021, 42(5): 149-163. |
| [8] | 孙爱晶, 李世昌, 张艺才. 基于PSO优化模糊C均值的WSN分簇路由算法[J]. 通信学报, 2021, 42(3): 91-99. |
| [9] | 曲明超, 司伟建, 袁雅芝. 基于不完全重合信号的单快拍DOA估计算法研究[J]. 通信学报, 2021, 42(12): 88-95. |
| [10] | 戴江安, 栾声扬, 赵明龙, 张兆军, 邱天爽. 脉冲噪声下基于平滑循环相关熵谱的调制识别方法[J]. 通信学报, 2021, 42(12): 121-133. |
| [11] | 杨国伟, 黄兆标, 樊冰, 周雪芳, 毕美华. 基于可见光通信的室内定位与定向系统[J]. 通信学报, 2020, 41(12): 162-170. |
| [12] | 谢晓兰,张征征,王建伟,程晓春. 基于三次指数平滑法和时间卷积网络的云资源预测模型[J]. 通信学报, 2019, 40(8): 143-150. |
| [13] | 李罡,吴志军. 基于多QoS约束条件的广域信息管理系统任务调度算法[J]. 通信学报, 2019, 40(7): 27-37. |
| [14] | 武小年,张楚芸,张润莲,孙亚平. WSN中基于改进粒子群优化算法的分簇路由协议[J]. 通信学报, 2019, 40(12): 114-123. |
| [15] | 牛盼盼,杨思宇,王丽,杨红颖,李丽,王向阳. 基于稳健特征点的平稳小波域数字水印算法[J]. 通信学报, 2019, 40(11): 187-198. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
|
||