

通信学报 ›› 2021, Vol. 42 ›› Issue (2): 124-133.doi: 10.11959/j.issn.1000-436x.2021036
付澍1,2, 杨祥月1, 张海君3, 陈晨1, 喻鹏4, 简鑫1, 刘敏1
修回日期:2020-11-20
出版日期:2021-02-25
发布日期:2021-02-01
作者简介:付澍(1985- ),男,贵州贵阳人,博士,重庆大学副教授、硕士生导师,主要研究方向为星地通信、NOMA、物联网、网络一体化等。基金资助:Shu FU1,2, Xiangyue YANG1, Haijun ZHANG3, Chen CHEN1, Peng YU4, Xin JIAN1, Min LIU1
Revised:2020-11-20
Online:2021-02-25
Published:2021-02-01
Supported by:摘要:
为解决无人机在数据收集过程中的路径规划问题,将其分为全局路径规划和局部路径规划。针对全局路径规划,将其建模为一个定向问题,定向问题是背包问题和旅行商问题2种经典优化问题的组合。采用指针网络深度学习对该模型进行求解,并在无人机能量约束下得到其服务节点集合及服务顺序。针对局部路径规划,基于无人机接收到节点的参考信号强度,通过深度Q网络学习对无人机局部飞行路径进行规划,使无人机逼近节点位置并服务各节点。仿真结果表明,所提方案能够在无人机能量约束下有效提升其数据收集的收益。
中图分类号:
付澍, 杨祥月, 张海君, 陈晨, 喻鹏, 简鑫, 刘敏. 物联网数据收集中无人机路径智能规划[J]. 通信学报, 2021, 42(2): 124-133.
Shu FU, Xiangyue YANG, Haijun ZHANG, Chen CHEN, Peng YU, Xin JIAN, Min LIU. UAV path intelligent planning in IoT data collection[J]. Journal on Communications, 2021, 42(2): 124-133.
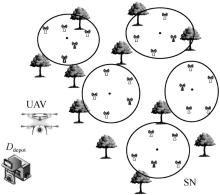
图1
系统模型"
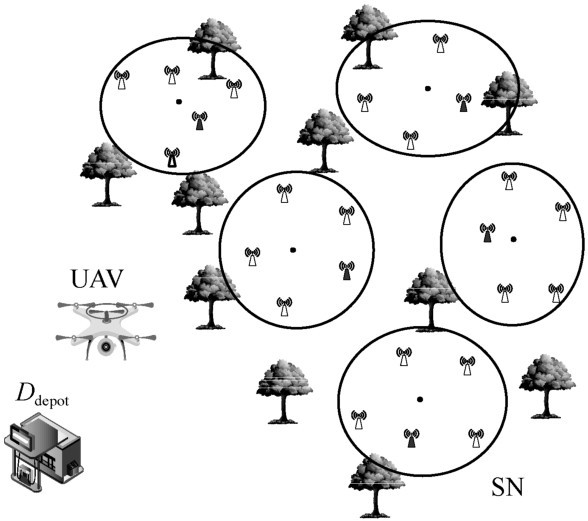
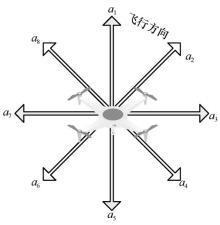
图2
无人机移动方向"

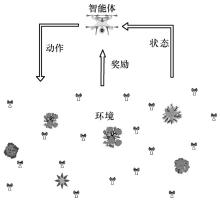
图3
强化学习智能体与环境的交互过程"


图4
深度Q学习的原理框架"

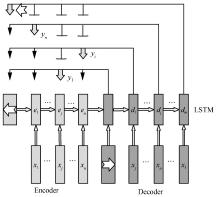
图5
指针网络深度学习的结构"

表1
AS方法使用的参数及其相应值"
| 参数 | 含义 | 值 |
| Hs | PN的隐藏层数目 | 256 |
| Es | PN的embedding层数目 | 256 |
| B | 批次 | 256 |
| T | 迭代次数 | 100 |
| γ | 学习率 | 0.02 |
| α | 衰减系数 | 0.9 |
| δ | 簇总数份额 | 0.5 |
表2
GP方法使用的参数及其相应值"
| 参数 | 含义 | 值 |
| Hs | PN的隐藏层数目 | 128 |
| Es | PN的embedding层数目 | 128 |
| B | 批次 | 128 |
| T | 迭代次数 | 100 |
| γ | 学习率 | 0.02 |
| α | 衰减系数 | 0.9 |
| δ | 簇总数份额 | 0.5 |
表3
DQN仿真各参数的设置"
| 仿真参数 | 取值 |
| 无人机初始位置 | (20,20) |
| 目标节点位置 | (183,265) |
| 步长/m | 8 |
| 探索速率ε | 0.1 |
| 传感器发射功率P T /dBm | 13 |
| 迭代次数T | 100 |
| 更新周期t | 30 |
| 记忆重放批次 | 400 |
| 折扣因子γ | 0.9 |

图6
D50下使用PN、AS和GP的路径规划效果"


图7
D100下使用PN、AS和GP的路径规划效果"

表4
D50和D100下使用PN、AS和GP的距离和奖励值"
| 任务 | PN | AS | GP | |||||
| 距离/km | 奖励 | 距离/km | 奖励 | 距离/km | 奖励 | |||
| D50 | 11.71 | 12.89 | 6.45 | 17.78 | 5.71 | 17.82 | ||
| D100 | 24.56 | 19.32 | 10.87 | 33.68 | 7.08 | 35.07 | ||

图8
AS方法下使用梯度下降法训练PN的损失值"

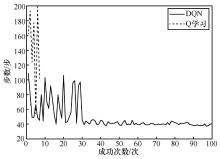
图9
DQN和Q学习成功次数的步数变化波动曲线"

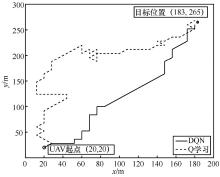
图10
DQN和Q学习最优路径对比"
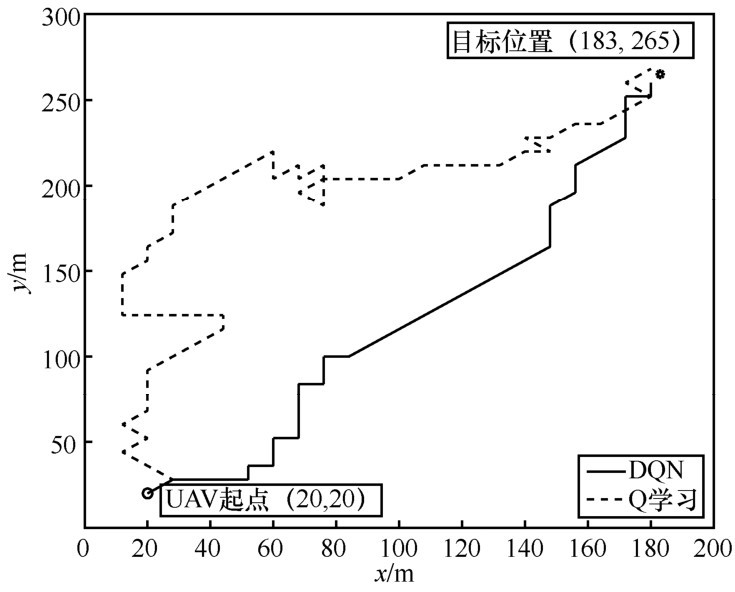
表5
不同起点和目标位置时DQN和Q学习的最优步长比较"
| UAV起点→目标节点坐标 | Q学习最优步长/m | DQN最优步长/m |
| (20,20)→(183,265) | 56 | 39 |
| (10,10)→(388,378) | 179 | 64 |
| (0,0)→(68,78) | 12 | 12 |
| [1] | LI C , ZHANG H , HAO B ,et al. A survey on routing protocols for large-scale wireless sensor networks[J]. Sensors, 2011,11(12): 3498-3526. |
| [2] | ZENG Y , ZHANG R , LIM T J . Wireless communications with unmanned aerial vehicles:opportunities and challenges[J]. IEEE Communications Magazine, 2016,54(5): 36-42. |
| [3] | WANG C , MA F , YAN J ,et al. Efficient aerial data collection with UAV in large-scale wireless sensor networks[J]. International Journal of Distributed Sensor Networks, 2015,2015: 1-19. |
| [4] | UTKARSHA S.P , RAJIV K G . Clustering and compressive data gpthering in wireless sensor network[J]. Wireless Personal Communications, 2019,109(2): 1-21. |
| [5] | JIE G , TSUNG-HUI C , CHAO S ,et al. Flight time minimization of UAV for data collection over wireless sensor networks[J]. IEEE Journal on Selected Areas in Communications, 2018,PP(99): 1. |
| [6] | ZAIN A A , SUHAIB M , MUHAMMAD A . UAV based data gpthering in wireless sensor networks[J]. Wireless Personal Communications, 2019,106(4): 1-11. |
| [7] | DUAN H , LI P . UAV path planning[M]. Berlin: Springer, 2014. |
| [8] | ARVANITAKI A , PAPPAS N . Modeling of a UAV-based data collection system[C]// 2017 IEEE 22nd International Workshop on Computer Aided Modeling and Design of Communication Links and Networks. Piscataway:IEEE Press, 2017: 1-6. |
| [9] | RAGI S , CHONG E K P . UAV path planning in a dynamic environment via partially observable markov decision process[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013,49(4): 2397-2412. |
| [10] | ZHAO Y J , ZHENG Z , ZHANG X Y ,et al. Q learning algorithm based UAV path learning and obstacle avoidence approach[C]// 2017 36th Chinese Control Conference. Piscataway:IEEE Press, 2017: 3397-3402. |
| [11] | HUANG H , YANG Y , WANG H ,et al. Deep reinforcement learning for UAV navigption through massive MIMO technique[J]. IEEE Transactions on Vehicular Technology, 2020,69(1): 1117-1121. |
| [12] | WANG C , WANG J , SHEN Y ,et al. Autonomous navigption of UAVs in large-scale complex environments:a deep reinforcement learning approach[J]. IEEE Transactions on Vehicular Technology, 2019,PP(99): 1. |
| [13] | ZHANG B , LIU C H , TANG J ,et al. Learning-based energy-efficient data collection by unmanned vehicles in smart cities[J]. IEEE Transactions on Industrial Informatics, 2017,PP(99): 1. |
| [14] | LIU C H , CHEN Z , TANG J ,et al. Energy-efficient UAV control for effective and fair communication coverage:a deep reinforcement learning approach[J]. IEEE Journal on Selected Areas in Communications, 2018,36(9): 2059-2070. |
| [15] | NA L , SI-MING H , CHANG-QING G . UAV path planning based on adaptive weighted pigeon-inspired optimization algorithm[J]. Computer Simulation, 2018,35(1): 38-42,125. |
| [16] | ARANTES J D S , MARCIO D S A , TOLEDO C F M ,et al. Heuristic and genetic algorithm approaches for UAV path planning under critical situation[J]. International Journal of Artificial Intelligence Tools, 2017,26(1): 1760008. |
| [17] | 刘丽珏, 罗舒宁, 高琰 ,等. 基于回溯蚁群-粒子群混合算法的多点路径规划[J]. 通信学报, 2019,40(2): 102-110. |
| LIU L J , LUO S N , GAO Y ,et al. Multi-point path planning based on the algorithm of colony-particle swarm optimization[J]. Journal on Communications, 2019,40(2): 102-110. | |
| [18] | VANSTEENWEGEN P , SOUFFRIAU W , OUDHEUSDEN D V . The orienteering problem:a survey[J]. European Journal of Operational Research, 2011,209(1): 1-10. |
| [19] | GUNAWAN A , LAU H C , VANSTEENWEGEN P . Orienteering problem:a survey of recent variants,solution approaches and applications[J]. European Journal of Operational Research, 2016,255(2): 315-332. |
| [20] | ABBASPOUR R A , SAMADZADEGAN F . Time-dependent personal tour planning and scheduling in metropolises[J]. Expert Systems with Applications, 2011,38(10): 12439-12452. |
| [21] | LI J , WU Q M , LI X Q ,et al. Study on the time-dependent orienteering problem[C]// International Conference on E-product E-service & E-entertainment. Piscataway:IEEE Press, 2010: 1-4. |
| [22] | BRAHIM A , HASSAN E F . Iterated local search algorithm for solving the orienteering problem with soft time windows[J]. SpringerPlus, 2016,5(1): 1-36. |
| [23] | VINYALS O , FORTUNATO M , JAITLY N . Pointer networks[C]// International Conference on Neural Information Processing Systems. Massachusetts:MIT Press, 2015: 2692-2700. |
| [24] | BELLO I , PHAM H , LE Q V ,et al. Neural combinatorial optimization with reinforcement learning[J]. arXiv Preprint,arXiv:1611.09940v1, 2016. |
| [25] | HU H , ZHANG X , YAN X ,et al. Solving a new 3D bin packing problem with deep reinforcement learning method[J]. arXiv Preprint,arXiv:1708.05930, 2017. |
| [26] | 王天荆, 李秀琴, 白光伟 ,等. 无线传感器网络中基于自适应网格的多目标定位算法[J]. 通信学报, 2019,40(7): 197-207. |
| WANG T J , LI X Q , BAI G W ,et al. Multi-target localization algorithm based on adaptive grid in wireless sensor network[J]. Journal on Communications, 2019,40(7): 197-207. | |
| [27] | WU S . Illegal radio station localization with UAV-based Q-learning[J]. China Communications, 2018,15(12): 122-131. |
| [28] | FARAJZADEH A , ERCETIN O . UAV data collection over NOMA backscatter networks:UAV altitude and trajectory optimization[J]. arXiv Preprint,arXiv:1902.03061, 2019. |
| [29] | JAWHAR I , MOHAMED N , AL-JAROODI J . UAV-based data communication in wireless sensor networks:models and strategies[C]// International Conference on Unmanned Aircraft Systems. Piscataway:IEEE Press, 2015: 687-694. |
| [30] | 王继红, 石文孝 . 认知无线传感器网络分簇路由协议综述[J]. 通信学报, 2018,39(11): 156-169. |
| WANG J H , SHI W X . Survey on cluster-based routing protocols for cognitive radio sensor networks[J]. Journal on Communications, 2018,39(11): 156-169. | |
| [31] | KOOL W , VAN H H , WELLING M . Attention,learn to solve routing problems[J]. arXiv Preprint,arXiv:1803.08475v3, 2018. |
| [32] | 3GPP. Further advancements for E-UTRA physical layer aspects[S]. TR 36.814 (V9.0.0), 2010. |
| [33] | PAN Y , DA X Y , HU H ,et al. Energy-efficiency optimization of UAV-based cognitive radio system[J]. IEEE Access, 2019,7: 155381-155391. |
| [34] | YAO Y , ZHU Z , HUANG S ,et al. Energy efficiency characterization in heterogeneous IoT system with UAV swarms based on wireless power transfer[J]. IEEE Access, 2020,8: 967-979. |
| [35] | ZHU Z , WANG N , HAO W ,et al. Robust beamforming designs in secure MIMO SWIPT IoT networks with a non-linear channel model[J]. IEEE Internet of Things Journal, 2020,PP(99): 1. |
| [36] | VINCENT F O , RAPHAEL F , DAMIEN E . Playing atari with deep reinforcement learning[J]. arXiv Preprint,arXiv:1312.5602, 2013. |
| [37] | SUTSKEVER I , VINYALS O , LE Q V . Sequence to Sequence Learning with Neural Networks[J]. Advances in Neural Information Processing Systems.Massachusetts:MIT Press, 2014: 3104-3112. |
| [38] | VINYALS O , KAISER L , KOO T ,et al. Grammar as a foreign language[J]. arXiv Preprint,arXiv:1412.7449, 2014. |
| [39] | HOCHREITER S , SCHMIDHUBER J . Long short-term memory[J]. Neural Computation, 1997,9(8): 1735-1780. |
| [40] | 曾广贤 . 基于神经网络学习方法的单机调度问题研究[D]. 厦门:厦门大学, 2018. |
| ZENG G X . Research on single machine scheduling problem based on neural network learning method[D]. Xiamen:Xiamen University, 2018. |
| [1] | 周大成, 陈鸿昶, 何威振, 程国振, 扈红超. 基于深度强化学习的微服务多维动态防御策略研究[J]. 通信学报, 2023, 44(4): 50-63. |
| [2] | 余雪勇, 邱礼翔, 宋家宁, 朱洪波. 无人机辅助边缘计算中安全通信与能效优化策略[J]. 通信学报, 2023, 44(3): 45-54. |
| [3] | 夏景明, 刘玉风, 谈玲. 基于蜂窝网络的多无人机能量消耗最优化算法研究[J]. 通信学报, 2023, 44(2): 185-197. |
| [4] | 王莉, 魏青, 徐连明, 沈渊, 张平, 费爱国. 面向通信-导航-感知一体化的应急无人机网络低能耗部署研究[J]. 通信学报, 2022, 43(7): 1-20. |
| [5] | 郎磊, 王荆宁, 王一, 赵子涛. 无人机辅助通信中基于用户轨迹的无线资源和航迹优化[J]. 通信学报, 2022, 43(3): 225-232. |
| [6] | 黄旭民, 张旸, 余荣, 蒋丽, 田辉, 吴远. 基于Stackelberg博弈的无人机辅助无线供能物联网能量优化[J]. 通信学报, 2022, 43(12): 146-156. |
| [7] | 陈赓, 齐书虎, 沈斐, 曾庆田. 面向B5G多业务场景基于D3QN的双时间尺度网络切片算法[J]. 通信学报, 2022, 43(11): 213-224. |
| [8] | 肖振宇, 刘珂, 朱立鹏. 无人机机间毫米波阵列通信技术[J]. 通信学报, 2022, 43(10): 196-209. |
| [9] | 李斌, 刘文帅, 谢万城, 费泽松. 智能反射面赋能无人机边缘网络计算卸载方案[J]. 通信学报, 2022, 43(10): 223-233. |
| [10] | 陈宇, 贾连兴. 面向无人机集群的双层分组拜占庭容错算法[J]. 通信学报, 2022, 43(1): 96-103. |
| [11] | 杨君一, 李博, 张钦宇. 基于物理层网络编码的无人机中继网络资源优化[J]. 通信学报, 2021, 42(9): 12-20. |
| [12] | 李赞, 胡俊凡, 李兵, 石嘉, 司江勃. 基于正交时频空技术的低轨卫星通信的安全分析[J]. 通信学报, 2021, 42(8): 25-32. |
| [13] | 舒坚, 王启宁, 刘琳岚. 基于深度图嵌入的无人机自组网链路预测[J]. 通信学报, 2021, 42(7): 137-149. |
| [14] | 徐思雅, 邢逸斐, 郭少勇, 杨超, 邱雪松, 孟洛明. 基于深度强化学习的能源互联网智能巡检任务分配机制[J]. 通信学报, 2021, 42(5): 191-204. |
| [15] | 贺蕾, 马建峰, 魏大卫. 面向无人机网络的属性代理签名方案[J]. 通信学报, 2021, 42(11): 87-96. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
|
||