

通信学报 ›› 2021, Vol. 42 ›› Issue (5): 63-74.doi: 10.11959/j.issn.1000-436x.2021070
谢良波, 李升, 周牧, 李泽, 田增山, 王亚, 付长友
修回日期:2021-03-12
出版日期:2021-05-25
发布日期:2021-05-01
作者简介:谢良波(1986- ),男,四川成都人,博士,重庆邮电大学副教授、硕士生导师,主要研究方向为射频识别技术、室内定位技术等基金资助:Liangbo XIE, Sheng LI, Mu ZHOU, Ze LI, Zengshan TIAN, Ya WANG, Changyou FU
Revised:2021-03-12
Online:2021-05-25
Published:2021-05-01
Supported by:摘要:
针对现有视距(LOS)定位方法在非视距(NLOS)环境中定位精度急剧恶化的问题,提出一种基于散射体信息的室内NLOS多站协作定位算法,可在完全没有LOS路径的情况下进行定位。首先,利用多AP以及联合场景先验信息协同确定目标NLOS区域和散射体模糊区域;其次,根据信号的到达角对散射体区域进行约束,并在区域内搜索散射体的位置信息;然后,利用这些信息构造基于差分飞行时间的误差最小化方程;最后,提出混合使用遗传算法和列文伯格马夸尔特算法求解目标方程。仿真及真实环境模拟测试结果显示,所提算法仅通过NLOS路径即可定位目标。
中图分类号:
谢良波, 李升, 周牧, 李泽, 田增山, 王亚, 付长友. 基于散射体信息的室内NLOS多站协作定位算法[J]. 通信学报, 2021, 42(5): 63-74.
Liangbo XIE, Sheng LI, Mu ZHOU, Ze LI, Zengshan TIAN, Ya WANG, Changyou FU. Scatterer information based indoor NLOS multiple base station cooperative localization algorithm[J]. Journal on Communications, 2021, 42(5): 63-74.
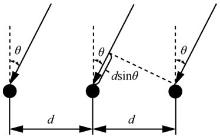
图1
线性天线阵列"


图2
NLOS环境下信号传播"
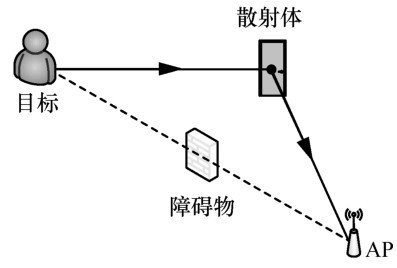

图3
室内NLOS定位场景"
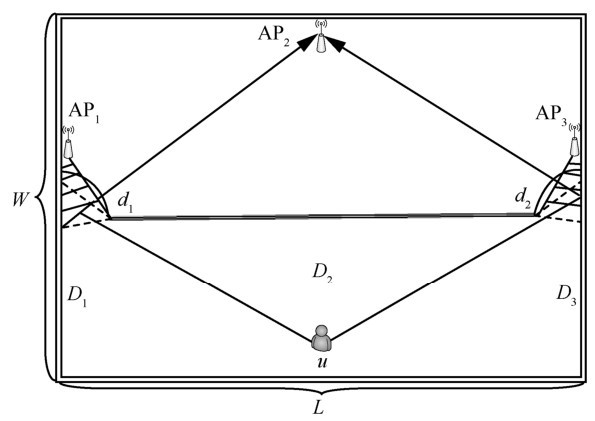

图4
各个AP接收到的反射信号的传播路径"
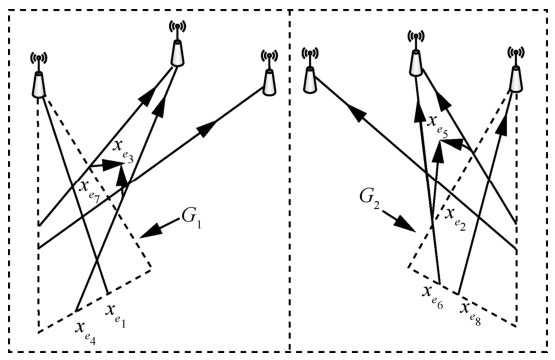
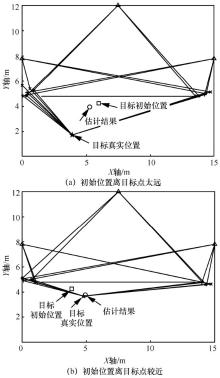
图5
初始位置对于LM算法性能的影响"


图6
GA对目标初始位置的影响"
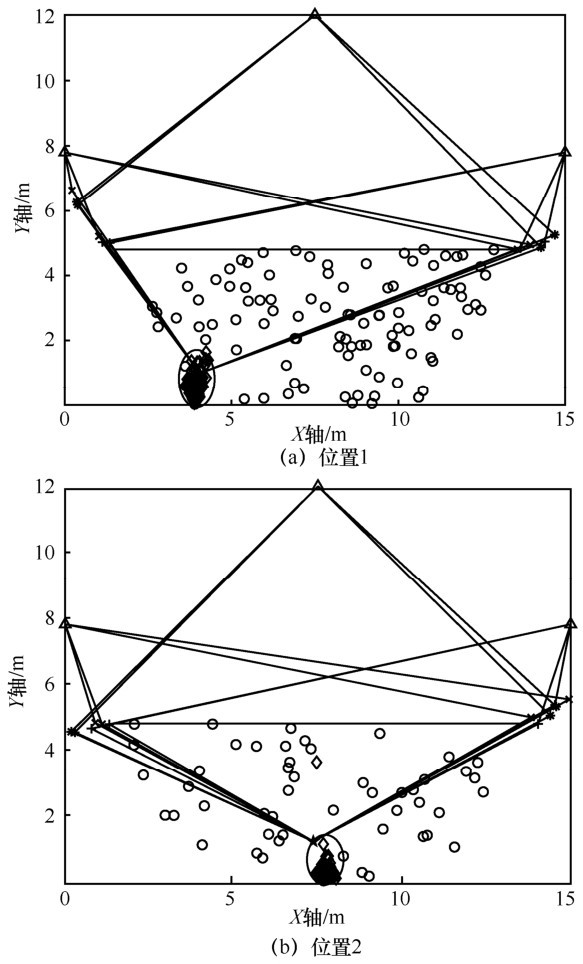

图7
不同定位算法的定位误差累积分布"
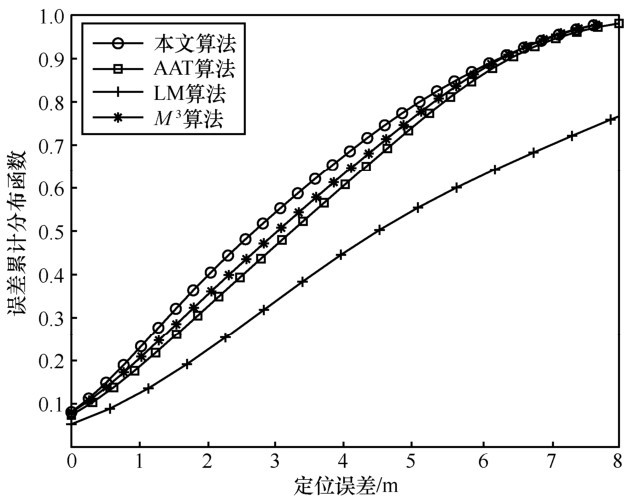

图8
不同散射体个数时的定位误差累积分布"


图9
不同墙壁长度时的定位误差累积分布"
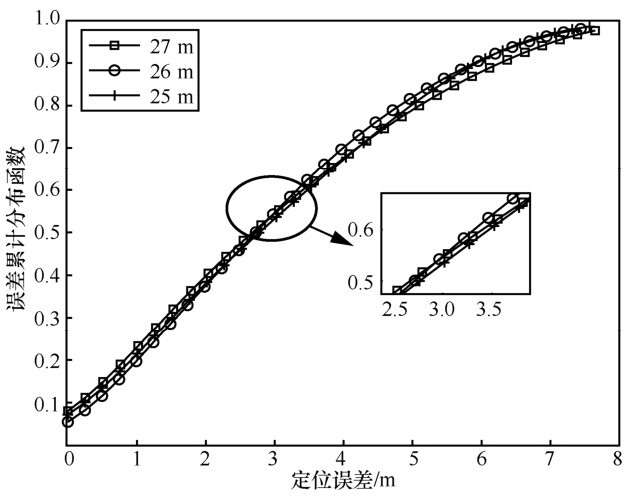
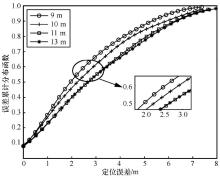
图10
AP1和AP3不同纵坐标时的定位误差累积分布"

表1
不同AOA和TOF误差下的定位精度"
| AOA/TOF | 0.2/m | 0.4/m | 0.6/m | 0.8/m | 1.0/m |
| 0° | 3.78 | 3.51 | 3.69 | 3.49 | 3.86 |
| 1° | 3.12 | 3.14 | 3.37 | 3.30 | 3.23 |
| 2° | 3.61 | 3.18 | 3.49 | 3.28 | 3.24 |

图11
AOA和TOF估计误差对定位精度的影响"


图12
真实场景以及模拟测试场景"


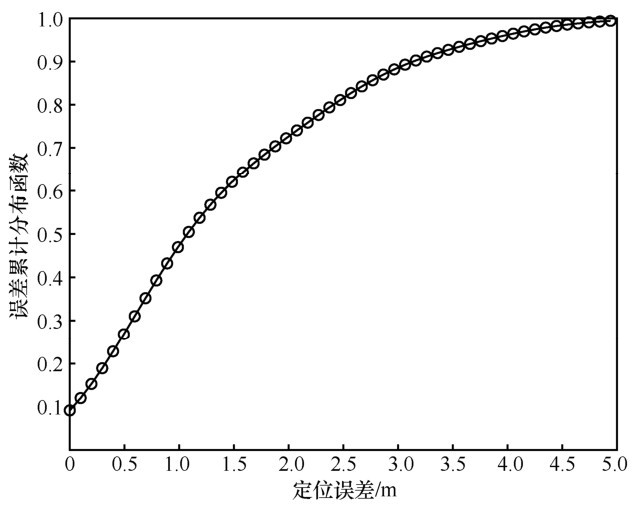
图13
模拟测试环境的定位误差累积分布"
| [1] | ZENG Y Z , PATHAK P H , MOHAPATRA P . WiWho:Wi-Fi-based person identification in smart spaces[C]// 2016 15th ACM/IEEE International Conference on Information Processing in Sensor Networks. Piscataway:IEEE Press, 2016: 1-12. |
| [2] | MARQUEZ A , TANK B , MEGHANI S K ,et al. Accurate UWB and IMU based indoor localization for autonomous robots[C]// 2017 IEEE 30th Canadian Conference on Electrical and Computer Engineering. Piscataway:IEEE Press, 2017: 1-4. |
| [3] | LI Z , ZHAO X H , HU F Y ,et al. SoiCP:a seamless outdoor–indoor crowdsensing positioning system[J]. IEEE Internet of Things Journal, 2019,6(5): 8626-8644. |
| [4] | MAKKI A , SIDDIG A , SAAD M ,et al. Survey of Wi-Fi positioning using time-based techniques[J]. Computer Networks, 2015,88: 218-233. |
| [5] | ZHU H , XIAO F , SUN L J ,et al. R-TTWD:robust device-free through-the-wall detection of moving human with Wi-Fi[J]. IEEE Journal on Selected Areas in Communications, 2017,35(5): 1090-1103. |
| [6] | ENDO Y , SATO K , YAMASHITA A ,et al. Indoor positioning and obstacle detection for visually impaired navigation system based on LSD-SLAM[C]// 2017 International Conference on Biometrics and Kansei Engineering. Piscataway:IEEE Press, 2017: 158-162. |
| [7] | CHAN S H , WU P T , FU L C . Robust 2D indoor localization through laser SLAM and visual SLAM fusion[C]// 2018 IEEE International Conference on Systems,Man,and Cybernetics. Piscataway:IEEE Press, 2018: 1263-1268. |
| [8] | XU S H , CHEN R Z , YU Y ,et al. Locating smartphones indoors using built-in sensors and Wi-Fi ranging with an enhanced particle filter[J]. IEEE Access, 2019,7: 95140-95153. |
| [9] | HE S N , CHAN S H G . Wi-Fi fingerprint-based indoor positioning:recent advances and comparisons[J]. IEEE Communications Surveys& Tutorials, 2016,18(1): 466-490. |
| [10] | KANDEL L N , YU S C . Indoor localization using commodity Wi-Fi APs:techniques and challenges[C]// 2019 International Conference on Computing,Networking and Communications. Piscataway:IEEE Press, 2019: 526-530. |
| [11] | DENG Z , FU X , WANG H . An IMU-aided body-shadowing error compensation method for indoor bluetooth positioning[J]. Sensors, 2018,18(1): 1-21. |
| [12] | LUO R C , HSIAO T J . Indoor localization system based on hybrid Wi-Fi/BLE and hierarchical topological fingerprinting approach[J]. IEEE Transactions on Vehicular Technology, 2019,68(11): 10791-10806. |
| [13] | VASISHT D , KUMAR S , KATABI D . Decimeter-level localization with a single Wi-Fi access point[C]// USENIX Symposium on Networked Systems Design and Implementation. Berkeley:USENIX Association, 2016: 165-178. |
| [14] | GURURAJ K , RAJENDRA A K , SONG Y ,et al. Real-time identification of NLOS range measurements for enhanced UWB localization[C]// 2017 International Conference on Indoor Positioning and Indoor Navigation. Piscataway:IEEE Press, 2017: 1-7. |
| [15] | ERTEL R B , REED J H . Angle and time of arrival statistics for circular and elliptical scattering models[J]. IEEE Journal on Selected Areas in Communications, 1999,17(11): 1829-1840. |
| [16] | ZHU X X , SHI M Y , ZHANG J ,et al. A scattering model based non-line-of-sight error mitigating algorithm via distributed multi-antenna[C]// 2007 IEEE 18th International Symposium on Personal,Indoor and Mobile Radio Communications. Piscataway:IEEE Press, 2007: 1-5. |
| [17] | 蔡跃明 . 现代移动通信[M]. 北京: 机械工业出版社, 2010. |
| CAI Y M . Modern mobile communications[M]. Beijing: China Machine Press, 2010. | |
| [18] | VANDERVEEN M C , PAPADIAS C B , PAULRAJ A . Joint angle and delay estimation (JADE) for multipath signals arriving at an antenna array[J]. IEEE Communications Letters, 2009,1(1): 297-299. |
| [19] | BAZZI A , SLOCK D T M , MEILHAC L . Single snapshot joint estimation of angles and times of arrival:a 2D Matrix Pencil approach[C]// 2016 IEEE International Conference on Communications. Piscataway:IEEE Press, 2016: 1-6. |
| [20] | MALIOUTOV D , CETIN M , WILLSKY A S . A sparse signal reconstruction perspective for source localization with sensor arrays[J]. IEEE Transactions on Signal Processing, 2005,53(8): 3010-3022. |
| [21] | STEPHEN B , LIEVEN V . 凸优化[M].王书宁,许鋆,黄晓霖,译, 北京: 清华大学出版社, 2013. |
| STEPHEN B , LIEVEN V . Convex optimization[M]. Beijing: Tsinghua University Press, 2013. | |
| [22] | CHEN Z , ZHU G R , WANG S L ,et al. M 3:multipath assisted Wi-Fi localization with a single access point[J]. IEEE Transactions on Mobile Computing, 2021,20(2): 588-602. |
| [23] | 田增山, 舒月月, 周牧 ,等. 基于B-LM圆环模型的NLOS信息约束单基站定位算法[J]. 电子与信息学报, 2018,40(10): 2316-2322. |
| TIAN Z S , SHU Y Y , ZHOU M ,et al. Single base station localization algorithm based on B-LM ring of scattering model using NLOS information[J]. Journal of Electronics & Information Technology, 2018,40(10): 2316-2322. | |
| [24] | YUAN G L , SHENG Z , WANG B P ,et al. The global convergence of a modified BFGS method for nonconvex functions[J]. Journal of Computational and Applied Mathematics, 2018,327: 274-294. |
| [25] | CHEN L , DU C Z , MA Y F . The higher-order Levenberg-Marquardt method with Armijo type line search for nonlinear equations[J]. Optimization Methods and Software, 2017,32(3): 516-533. |
| [26] | FREY B J , DUECK D . Clustering by passing messages between data points[J]. Science, 2007,315(5814): 972-976. |
| [27] | 崔玮, 吴成东, 张云洲 ,等. 基于高斯混合模型的非视距定位算法[J]. 通信学报, 2014,35(1): 99-106. |
| CUI W , WU C D , ZHANG Y Z ,et al. GMM-based localization algorithm under NLOS conditions[J]. Journal on Communications, 2014,35(1): 99-106. | |
| [28] | WEI X N , PALLEIT N , WEBER T . AOD/AOA/TOA-based 3D positioning in NLOS multipath environments[C]// 2011 IEEE 22nd International Symposium on Personal,Indoor and Mobile Radio Communications. Piscataway:IEEE Press, 2011: 1289-1293. |
| [29] | 扈罗全, 朱洪波 . 一种有多反射特性的超宽带信道建模方法[J]. 微波学报, 2007,23(1): 56-61. |
| HU L Q , ZHU H B . A modeling method for ultra-wideband channels with multiple bounces[J]. Journal of Microwaves, 2007,23(1): 56-61. | |
| [30] | ZHAO K , GUSTAFSON C , LIAO Q B ,et al. Channel characteristics and user body effects in an outdoor urban scenario at 15 and 28 GHz[J]. IEEE Transactions on Antennas and Propagation, 2017,65(12): 6534-6548. |
| [31] | MEDE?OVI? P , VELETI? M , BLAGOJEVI? ? . Wireless insite software verification via analysis and comparison of simulation and measurement results[C]// 2012 Proceedings of the 35th International Convention MIPRO. Piscataway:IEEE Press, 2012: 776-781. |
| [32] | SULYMAN A I , ALWARAFY A , MACCARTNEY G R ,et al. Directional radio propagation path loss models for millimeter-wave wireless networks in the 28-,60-,and 73-GHz bands[J]. IEEE Transactions on Wireless Communications, 2016,15(10): 6939-6947. |
| [1] | 蒋锐, 虞跃, 徐友云, 王小明, 李大鹏. 基于CHAN的改进卡尔曼滤波室内定位算法[J]. 通信学报, 2023, 44(2): 136-147. |
| [2] | 谢良波, 李宇洋, 王勇, 周牧, 聂伟. 基于自适应蝙蝠算法的室内RFID定位算法[J]. 通信学报, 2022, 43(8): 90-99. |
| [3] | 赵增华, 童跃凡, 崔佳洋. 基于域自适应的Wi-Fi指纹设备无关室内定位模型[J]. 通信学报, 2022, 43(4): 143-153. |
| [4] | 谢良波, 刘西西, 王勇, 周牧, 田增山. 基于RFID载波相位的室内EKF定位算法[J]. 通信学报, 2022, 43(3): 124-134. |
| [5] | 孙大洋, 石文孝, 张定国. 基于室内地图推演与信号穿墙修正的定位优化方法[J]. 通信学报, 2022, 43(10): 146-156. |
| [6] | 王慧强, 高凯旋, 吕宏武. 高精度室内定位研究评述及未来演进展望[J]. 通信学报, 2021, 42(7): 198-210. |
| [7] | 刘桂岐, 钱志鸿, 李华亮, 孙佳妮, 冯一诺, 王雪. 基于有效AP选择和多分类LDA的室内定位算法[J]. 通信学报, 2021, 42(11): 109-120. |
| [8] | 周牧, 龙玥辛, 蒲巧林, 王勇, 何维. 基于CSI张量分解的室内Wi-Fi指纹定位方法[J]. 通信学报, 2021, 42(11): 159-171. |
| [9] | 张治,熊天波,陈建侨,马楠. 无人机三维空地信道模型的空间特性研究[J]. 通信学报, 2020, 41(2): 123-130. |
| [10] | 杨国伟, 黄兆标, 樊冰, 周雪芳, 毕美华. 基于可见光通信的室内定位与定向系统[J]. 通信学报, 2020, 41(12): 162-170. |
| [11] | 乐燕芬,汤卓,盛存宝,施伟斌. 基于多分布密度位置指纹的高效室内定位算法研究[J]. 通信学报, 2019, 40(1): 172-179. |
| [12] | 何杰,吴雅南,段世红,徐丽媛,吕家慧,徐诚,齐悦. 人体对UWB测距误差影响模型[J]. 通信学报, 2017, 38(Z1): 58-66. |
| [13] | 周牧,王斌,田增山,张千坤. 室内BLE/MEMS跨楼层融合定位算法[J]. 通信学报, 2017, 38(5): 1-10. |
| [14] | 李华亮,钱志鸿,田洪亮. 基于核函数特征提取的室内定位算法研究[J]. 通信学报, 2017, 38(1): 158-167. |
| [15] | 周牧,蒲巧林,田增山. 室内WLAN定位中位置指纹优化的接入点部署方法[J]. 通信学报, 2015, 36(Z1): 30-41. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
|
||