

主管单位:中国科学技术协会
主办单位:中国通信学会
ISSN 1000-436X CN 11-2102/TN
主办单位:中国通信学会
ISSN 1000-436X CN 11-2102/TN

阴影是遥感影像的解译标志之一,然而在高分辨率遥感影像变化检测中,阴影所产生的“伪变化”是导致错检的主要原因之一。为此,提出了一种结合阴影补偿与多尺度融合的对象级高分遥感影像变化检测方法。在面向对象的变化检测框架下,首先提取遥感影像中的地物阴影,然后对多尺度变化检测进行阴影补偿。其中,通过构建一种尺度间互信息最小化的目标函数实现了尺度参数的自适应提取。在此基础上,结合所提出的阴影补偿因子,设计了一种基于D-S证据理论的决策级多尺度融合策略,并进一步对变化强度等级进行了划分。实验证明,该方法能够较好地解决阴影所导致的错检问题,显著提高变化检测精度。
As an interpreting symbol of remote sensing images,shadow,however,brings about “pseudo changes”,which is one of the main sources leading to error detection in high-resolution remote sensing image change detection.For this issue,an object-based high-resolution remote sensing image change detection method was proposed combining with shadow compensation and multi-scale fusion.In the object orientation detection framework,the shadows in the remote sensing images were extracted.Then multi-scale change detection was conducted with shadow compensation.In the process,an objective function was constructed of mutual scale information minimization to realize the adaptive extraction of scale parameters.Based on this,combined with the shadow compensation factor,a multi-scale decision-level fusion strategy built on D-S theory of evidence was designed,and the levels of change intensity were further divided.The experiments show that the method is effective in solving the error detection problem caused by shadow,significantly improving the precision of change detection.
遥感影像变化检测是从不同时期的遥感数据中定量分析和确定地表变化的过程[1]。近年来,随着多时相高分辨率遥感数据的不断积累,如何从中提取和检测城市场景中的变化信息已成为遥感科学和地理信息科学的重要研究课题[2,3]。与中、低分辨率遥感影像相比,高分辨率遥感影像的光谱、纹理及空间细节信息等都更加丰富[4]。与此同时,空间分辨率的提高也使变化检测面临着更加突出的“同物异谱”和“同谱异物”问题。为此,学者们试图利用面向对象的图像分析(OBIA,object-based image analysis)来提高变化检测的精度[5]。
与传统像素级检测方法相比,对象级变化检测(OBCD,object-based change detection)基于检测对象固有形状及尺寸进行特征提取,对配准误差、噪声等具有更高的顽健性[6,7]。例如,Chen 等[8]提出的OB-HMAD方法以地理对象作为基本单元,依据最小噪声分离变换(MNF,minimum noise fraction rotation)确定分割阈值来提取变化信息,其检测精度显著优于传统像素级方法。佃袁勇等[9]通过多尺度的图像分割、特征提取及融合来描述变化信息,与基于单一尺度的变化检测方法相比,错检率显著降低。尽管如此,现有多尺度 OBCD 方法中大多是直接比较地理对象间光谱、纹理特征的差异,而忽略了地物阴影的影响。特别是在城市场景中,各种人造阴影、自然地物阴影普遍存在且密集分布,地物阴影所导致的“伪变化”已成为产生错检的主要原因之一[10]。因此,有必要在多尺度变化检测中引入阴影补偿策略,而其关键在于准确的阴影提取、尺度参数的合理选择,以及光谱、纹理、阴影及尺度信息的有效融合。
基于以上分析,本文提出了一种结合阴影补偿与多尺度融合的对象级高分遥感影像变化检测方法。首先,基于矢量量化(VQ,vector quantization)的分类结果,利用卡方检验进行阴影检测。其次,采用作者之前提出的高分遥感影像分割方法WJSEG(wavelet-JSEG)提取地理对象作为分析基元[11]。在此基础上,通过迭代计算自适应提取尺度间互信息最小值对应的尺度参数集合。最后,基于结构自相似性(SSIM,structural similarity)与阴影补偿进行多尺度决策融合。
本研究的特点是:在多尺度变化检测的阴影补偿过程中,首先通过构建一种尺度间互信息最小化的目标函数,实现了尺度参数的自适应提取;在此基础上,设计了一种阴影补偿因子,进而提出了一种基于D-S证据理论的决策级多尺度融合策略,在显著提高变化检测精度的同时对变化强度的等级进行了划分。
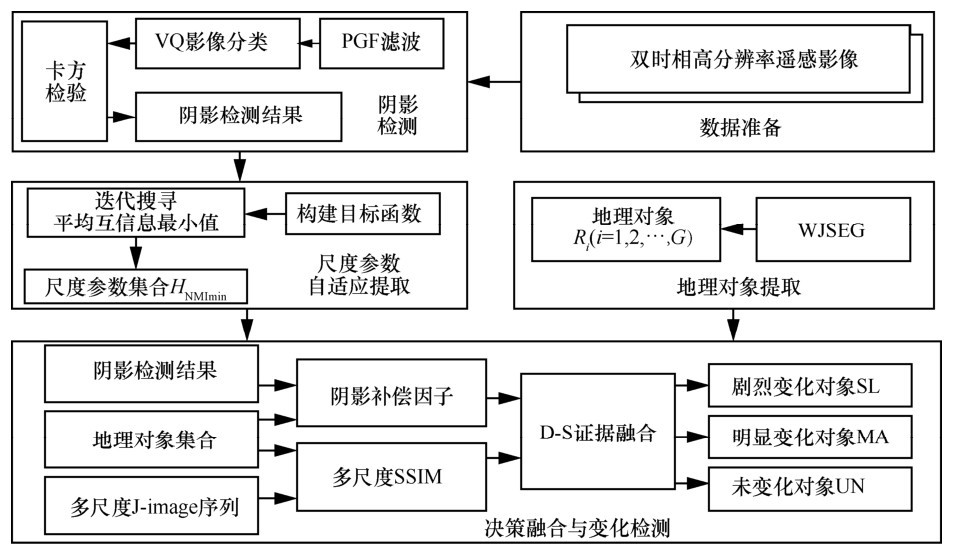
先假设多时相影像已经过几何配准与辐射校正预处理,则所提出方法主要包括4个步骤:步骤1,分别对多时相影像进行阴影检测;步骤2,选择单一时相影像进行 WJSEG 分割,提取统一的地理对象集合;步骤3,在步骤2的基础上,结合阴影检测结果迭代搜寻目标函数平均互信息最小值,自适应提取尺度参数集合;步骤 4,综合多种特征进行多尺度决策融合,获得最终变化检测结果。方法流程如图1所示。
高斯分布背景模型认为影像的自然背景符合高斯分布,则人造地物作为出界点可被检测出来。而对于人造地物密集分布的城市场景,如果采用VQ 分类方法将人造地物与自然背景分别划分为一类或者几类,其分类结果依然符合高斯分布,阴影则可以作为出界点被检测出来[12]。
基于以上假设,首先采用Bai S等[13]提出的VQ方法对影像进行分类:定义同组滤波器(PGF,peer group filter),将滤波所获得的局部统计特性作为权重,进行 VQ 初始量化;在此基础上,采用 GLA (generalized lloyd algorithm)对矢量量化结果进行分类,具体计算过程可参见文献[13];基于分类结果,将阴影像素视为出界点,采用卡方检验进行阴影检测。定义卡方分布为
其中,X 为随机变量,
其中,1-γ为置信度,实验中置信度通过试错法取最优值来确定。此时,卡方值小于
通过分割来提取地理对象是进行对象级变化检测的基础,本文采用作者之前提出的多尺度分割方法 WJSEG[11],原因在于:相较于知名商业软件eCognition,WJSEG不仅能够准确定位对象边缘,且保持对象轮廓更加完整,更有利于提高变化检测过程的方法透明度。需要说明的是,分割仅在单一时相影像中进行,再将分割结果根据配准获得的像素间匹配关系直接映射到另一时相影像中,从而确定统一的地理对象集合
与传统小波、轮廓波变换等相比,J-image序列不仅能够描述不同尺寸局部区域的光谱、纹理复杂程度,还具有对高频信息方向性不敏感的特点。因此,本文采用 J-image 影像序列作为对象级变化检测的多尺度分析平台。
2.3.1 多尺度J-image序列
单一尺度的 J-image 由局部区域同质性指标J-value构成的,J-value定义为:令每一个像素的位置
将 J-value 替换z f的像素值并遍历所有像素,可获得单一尺度的 J-image。进而通过改变尺度参数H,可获得多尺度的J-image影像序列。
2.3.2 尺度参数自适应提取
尺度参数集合的选择是否合理是影响多尺度变化检测效果的关键因素之一,体现在:尺度参数应当与场景中代表性地物的尺寸相近,从而有利于准确描述此类地物的变化信息;若尺度参数过多,则必然存在大量的冗余信息;若尺度参数过少,又容易陷入局部最优。由于尺度间互信息能够反映尺度参数间的关联程度,因此互信息越小时尺度参数间包含的冗余信息越少。同时,阴影在对象级变化检测中作为一种干扰因素,不应当参与尺度间互信息的计算。由此,本文提出了一种基于尺度参数间互信息最小化的目标函数优化策略,以实现尺度参数的自适应选择。具体步骤如下。
Step1 依据目视解译在影像中选择尺寸较大的地理对象(如湖泊、操场等),统计其包含的像素数量为E。
Step2 设定尺度参数的最大值HMAX为大于
Step3 依据阴影检测及配准结果,选择在两时相影像中均为非阴影的像素集合。利用该像素集合分别在单一时相影像中计算相邻尺度间的互信息为
Step4 根据式(4)构建目标函数,从而获得双时相影像相邻尺度间的互信息值。
Step5 通过迭代计算遍历所有可能的尺度参数组合,从而自适应地提取NMIall最小值对应的尺度参数集合
依据HNMImin及式(3),首先计算每个时相原始影像的多尺度J-image序列,同时,由于J-image的尺寸与原始影像相同,依据 WJSEG 分割及阴影检测结果可直接获得地理对象集合R及阴影在不同时相、相同尺度 J-image 中的投影;然后在此基础上,分析任意对象
2.4.1 多尺度相似性度量
本文采用SSIM来度量Ri在不同时相、相同尺度的 J-image 之间的相似程度,原因是与传统的直方图匹配及欧氏距离相比,SSIM能够同时从均值、方差和协方差3个方面综合反映RC间的相似性[14]。计算过程如下。
设Ri在时相1和时相2相同尺度J-image中的投影分别为Ri1和Ri2,则Ri1与Ri2间的SSIM为
其中,μi1、μi2、σi1、σi2、
2.4.2 结合阴影补偿的D-S决策融合
基于阴影检测结果与多角度相似性度量集合,本文提出了一种结合光谱、纹理特征与阴影补偿因子的D-S决策融合策略,从而实现变化检测及变化强度等级的划分。D-S证据理论具有无需先验概率,直接利用异源信息作为证据支持的优点,Dempster合成规则如下[15]。
设A为焦元,U是识别框架,由于尺度总数为D,则对于∀A⊆U,U 上的D个 mass 函数的Dempster合成规则为
其中,V为归一化常数,即
所提出的 D-S 融合策略首先定义识别框架U=[SL,MA,UN],将对象划分为剧烈变化类SL、显著变化类MA和未变化类UN,则焦元包括[SL]、[MA]、[UN]、[SL,MA,UN]。对任意对象Ri,建立基本概率赋值函数(BPAF,basic probability assignment function)如下:
其中,αk用于描述对某一尺度所提供证据的信任程度,
其中,β1为Ri在双时相影像中均为非阴影的像素比例,此类像素的变化检测未受到阴影的影响,因此在补偿因子λ中的权重l1应最高;β2为Ri在双时相影像中均为阴影的像素比例,由于双时相阴影之间可能存在差异从而导致“伪变化”,因此权重l2应较低;β3为Ri仅在一个时相影像中为阴影的像素比例,由于此类像素受到阴影影响最为显著,因此权重l3应最低。由此,在l1>l2>l3且l1+l2+l3=1的条件约束下,本文根据2组实验中阴影补偿对最终变化检测结果的影响,采用试错法确定当l1=0.6,l2=0.3,l3=0.1时能够取得较为理想的效果。
根据式(12)可知,λ越大则阴影对变化检测的干扰越小。在此基础上,对任意对象Ri,采用式(6)对所构建的BPAF进行多尺度证据合成。最后,采用如下判别规则对变化强度等级进行划分。
1) 属于SL类的Ri应满足:mi([SL])>0.8,或者mi([SL])>0.6且mi([MA])>0.3。
2) 属于MA类的Ri应满足:mi([MA])>0.7且mi([SL])>0.1,或者mi([UN])<0.1。
3) 否则,Ri属于UN类。
以上判别规则的依据在于,对象Ri属于某类的可能性越大,则该类对应的概率分配函数取值应当较高。因此,以Ri属于剧烈变化对象为例,仅依据剧烈变化类概率分配函数所提供的证据,需满足mi([SL])大于阈值0.8;若依据剧烈及显著变化类概率分配函数所提供的证据,则需满足mi([MA])大于阈值0.3且mi([SL])大于阈值0.6,以此类推。需要指出的是,划分规则中的阈值均采用试错法确定,而在实际应用中可根据需求调整剧烈变化SL类的划分阈值,从而为野外勘测等应用场景提供更有价值的靶标信息。
实验采用多组不同空间分辨率、不同传感器类型的多时相高分辨率遥感影像,并与未经阴影补偿的对象级变化检测方法OB-HMAD方法[8]及传统像素级变化检测方法CVA-EM[16]进行比较分析。实验平台采用Matlab R2014a,处理器为Inter Core i5 3.2 GHz,内存为8 GB。
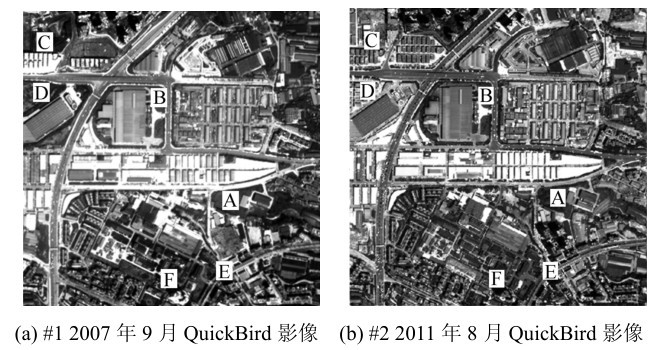
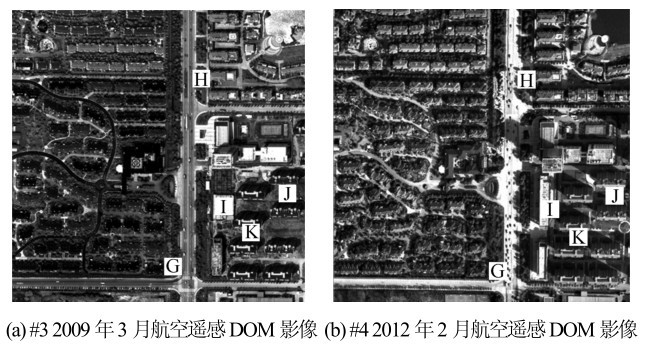
实验采用的多时相影像均已经过几何配准与辐射校正。实验数据集1为中国重庆地区的多光谱QuickBird影像,采集时间分别为2007年9月和2011年8月,空间分辨率为2.4 m,图像尺寸为1024像素×1024像素,如图2所示。实验数据集2为中国江苏南京地区的航空遥感 DOM(digital ortho-photo map)影像,采集时间分别为2009年3月和2012年2月,空间分辨率为0.6 m,图像尺寸为1024像素×1024像素,如图3所示。
图2 和图3 所示实验影像均为典型的城市场景,主要由植被、道路、阴影、建筑物及其他人造目标构成(为便于描述,我们对影像采用“#”符号进行表示,并对其中一些位置或区域采用字母进行标注)。由于 2 个数据集中影像的采集时间均为夏末秋初或冬末春初,植被的物候差异对变化检测的影响较小(如位置A、B、H和G等)。场景中的典型变化类型主要为由植被变为建筑物(如位置C),由荒地变为建筑物(如位置 D)或植被(如位置J),以及建筑物重建(如位置I)等。阴影主要存在于高层建筑物的背向阳光的一侧(如位置F、E、K)。特别是在实验数据集2中,由于光照条件存在明显的差异,阴影导致的“伪变化”也更加突出。
通过与原始图像对比可以看出,影像#1、#2及#3较为真实地反映了建筑物等地物阴影。在影像#4中,由于阴影所占的面积较大,在一定程度上破坏了高斯分布背景模型,检测结果中存在一些漏检(如位置L、M)及错检(如位置N、O)现象。尽管如此,与其他 3幅影像相比,影像#4中阴影所在区域仅灰度值有所降低,但基本保持了地表原始的纹理特征。同时,由于变化检测所依赖的 J-value 主要反映了局部区域纹理特征的复杂程度,因此影像#4中的阴影检测误差对变化检测的影响有限。
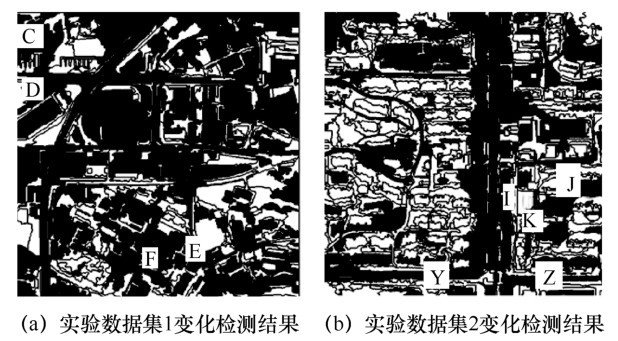
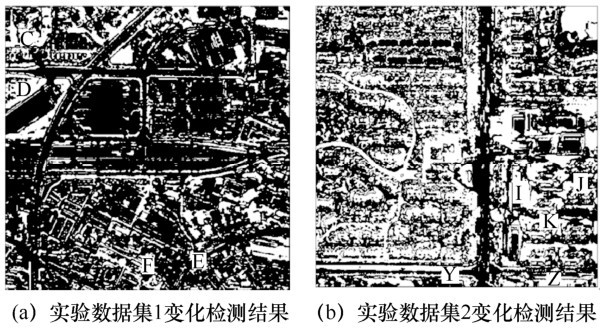
实验中设定HMAX=20,通过对式(4)求最小值,获得实验数据集 1 对应的尺度参数集合为HNMImin=[5,7,11,14,16],实验数据集2为 HNMImin=[5,9,11,13,17]。在此基础上,利用式(5)计算每个对象在多尺度J-image中的SSIM,最后结合阴影检测结果进行D-S决策融合。通过将不同变化等级的对象采用不同的灰度进行表示,所获得的变化检测结果如图8所示。
通过目视分析可以看出,本文方法明显优于其他2种方法,体现在:在2组实验中,对于发生变化且没有受到阴影影响的对象,如位置C、D、I、Y,仅有本文提出的方法做出了准确的判别。OB-HMAD方法对于由植被变为建筑物的位置C,以及由植被变为篮球场的位置 Y 均出现了漏检。CVA-EM方法由于以像素作为变化检测的基元,对于位置I和位置Y的新建人造地物均出现了部分错检和漏检。对于受到阴影干扰而未发生变化的对象,如位置E、F,3种方法均未发生错检。而对于受到阴影干扰且真实发生变化的对象,如由裸地变为草地的位置J和位置K,OB-HMAD方法均发生了漏检,而CVA-EM方法在位置J发生了漏检。对于仅光谱特征存在较大差异但实际并未发生变化地物,如位置Z的建筑物,仅CVA-EM方法发生了错检。
3.4.1 像素级精度评价
首先对基于像素的不同对象、像素级变化检测方法的性能进行定量评价。为保证所选择参考像素的准确性及合理分布,本文先通过实地考察与目视分析方法,采用人工解译方式提取了5 000个变化像素和5 000个未变化像素,作为参考样本集。精度评价指标包括总体精度、错检率、漏检率、kappa系数及运行时长,2 组实验数据集的精度评价结果如表1和表2所示。
根据精度评价结果,本文方法在2组实验数据集城市场景的变化检测实验中总体精度能够分别达到86.3%和84.4%,明显优于其他2种方法,总体精度与参考样本集的目视分析结果一致。OB-HMAD方法的局限性主要因为没有考虑阴影因素的影响。像素级方法在2组实验中检测精度均低于70%,且显著低于2种对象级变化检测方法。相比数据集1实验,3种方法在数据集2实验中各精度指标均有所下降,尤其是错检率指标更加明显,其原因主要是数据集 2 中受到的阴影干扰更加突出。尽管如此,由于本文方法在决策融合时结合了阴影补偿,因此相较于其他2种方法波动较小。在相同实验环境下的运行时间方面,像素级方法CVA-EM的运行时间最短,但检测精度最低;本文提出的方法由于引入了阴影检测及补偿策略,运行时间略高于OB-HMAD方法,但检测精度显著提高。
3.4.2 对象级精度评价
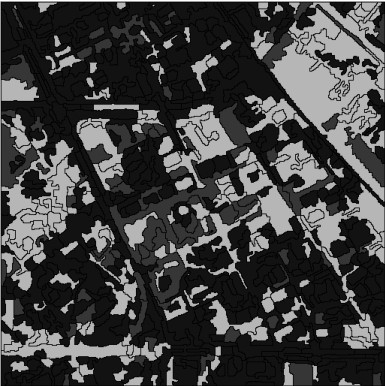
为进一步分析阴影对检测精度的影响,实验还采用了一组未受阴影影响的多时相高分影像,记为数据集3。该数据集为中国上海地区的多光谱SPOT 5影像,采集时间分别为2009年3月和2012年2月,空间分辨为2.5 m,图像尺寸为512像素×512像素,如图11 所示。设定HMAX=15,自适应提取的HNMImin=[5,6,7,9,10],本文方法及OB-HMAD方法对象级精度评价变化检测结果如图12和图13所示。
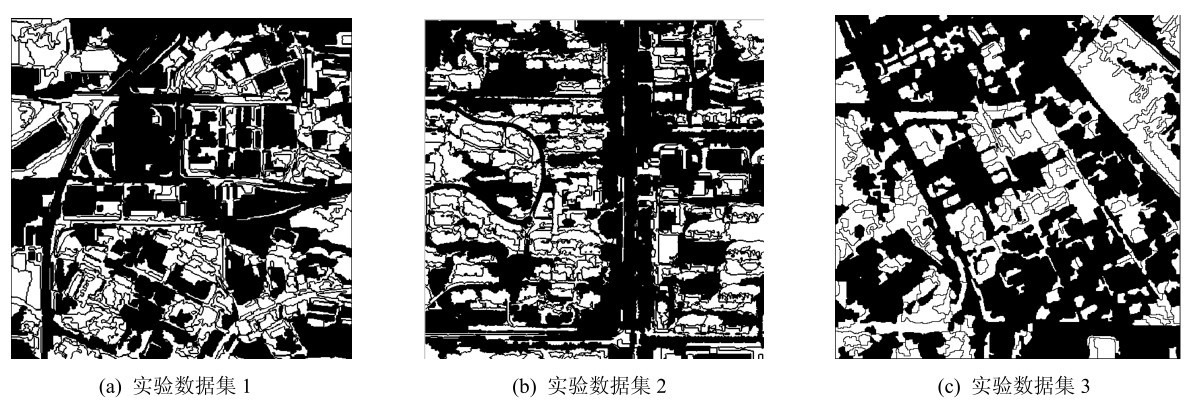
在此基础上,针对分割区域的变化情况进行对象级定量精度评价。3组实验数据集的变化参考图如图14 所示,其中白色代表变化区域,黑色代表未变化区域。在对象级定量精度评价中,本文方法评价为剧烈变化及显著变化的区域统一归为变化区域。
精度评价指标包括总体精度、错检率、漏检率、kappa系数,3组实验的精度评价结果如表3所示。
对比像素精度、对象级精度评价方式,首先在实验数据集 1、实验数据集 2 中本文方法和OB-HMAD方法在2种评价方式下获得的精度指标基本一致,即存在阴影干扰时本文方法均显著优于OB-HMAD;其次,由于实验数据集3未受阴影影响,OB-HMAD的错检率显著降低,但总体精度仍低于本文方法;最后,本文方法的检测精度在3组实验中并未因为阴影干扰的程度不同而产生明显波动,具有良好的顽健性。
针对高分辨率遥感影像变化检测中由于阴影所导致的“伪变化”,提出了一种结合阴影检测与多尺度融合的对象级高分辨率遥感影像变化检测方法。该方法不仅构建了一种基于尺度间互信息最小化的目标函数以自适应提取尺度参数集合,还提出了一种结合阴影补偿因子的多尺度决策级融合策略,进而实现了对变化强度等级的划分。实验证明,该方法能够有效地减少阴影所导致的错检问题,显著提高变化检测精度且具有良好的顽健性。尤其是在实验数据集2中因阴影导致的“伪变化”比实验数据集1更显著,但本文方法总体精度仅下降了不到2%,而CVA-EM方法的总精度下降接近10%,OB-HMAD方法的总体精度下降了超过7%,从而进一步证明了所提出的阴影补偿策略是必要且有效的。









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}