

主管单位:中国科学技术协会
主办单位:中国通信学会
ISSN 1000-436X CN 11-2102/TN
主办单位:中国通信学会
ISSN 1000-436X CN 11-2102/TN

针对有限字长效应导致滤波器零极点的位置偏移问题,基于状态空间实现结构研究FIR数字滤波器零极点对系数误差的灵敏性。不同于IIR滤波器,FIR滤波器状态空间模型中的系统矩阵具有亏损性。引入亏损矩阵广义特征向量分析极点的灵敏性,导出灵敏度表达式,并依据相似变换理论找寻最佳变换矩阵,提出FIR滤波器零极点灵敏度的优化实现。理论推导及仿真实验表明,FIR滤波器极点对系数误差敏感度较高,且所提优化实现方案能够降低灵敏度。
Aiming at the deviation of pole and zero in filters which caused by the finite word length (FWL) effects,the sensitivity of pole and zero for FIR digital filters to coefficient errors was studied based on the state-space model.Unlike the IIR filter,the system matrix in state-space model of the FIR filter was defective.A set of generalized eigenvectors of defective matrix was introduced to analyze the pole sensitivity and derive the measure expression,and optimal realizations with respect to pole-zero sensitivity for FIR filters were proposed by finding optimal transformation matrices according to the similarity transformation theory.Theoretical analysis and simulation experiments show that the poles of a FIR filter are more sensitive to coefficient errors,and the proposed optimal realizations can reduce the sensitivity.
有限字长(FWL,finite word length)效应导致的系数量化会影响实际应用中滤波器的性能,使零极点位置发生偏移,从而改变频率响应特性。研究系数变化的灵敏度有多种方式,一类基于衡量传递函数关于参数的扰动[1,2,3],另一类基于测度系统零极点位置的偏差[4,5]。某些情况下相比于量化引起传递函数中的误差,零极点位置偏移对滤波器性能产生的影响更为重要,例如,在设计陷波滤波器时需要保证零点位置的精确性,或对于闭环系统,其稳定性决定于极点(特别是主导极点)位置[6]。
通常零极点灵敏度的度量,是基于系统的状态空间实现结构
值得注意的是,以上对零极点灵敏度的分析均基于IIR滤波器,而FIR滤波器相较于IIR滤波器有容易实现线性相位特性、适合多采样率转换等优点,广泛应用于 4G 移动通信系统、视频与图像处理等领域。然而,FIR 滤波器与极点灵敏度有关的系统矩阵
对于N阶线性时不变FIR数字滤波器H(z)的直接型结构,其状态空间实现
其中,
其中,
令
称
在无限精度下H(z)可用不同等价的状态空间实现表示,但这些实现在有限精度下会呈现出不同性能。以下利用矩阵特征值为相似不变量这一特性,通过求解最佳的变换矩阵
记
其中,
,
零点
其中,
则式(7)亦可表示成
其中,
滤波器总的零点灵敏度为
若将实现
其中,
其中,
当且仅当
用状态方程式(1)的可控标准型描述N阶FIR滤波器,实现
其特征值为
系统矩阵A是一个N重亏损矩阵,由其结构可知存在如下形式的可逆矩阵
使
其中,
称
称
则矩阵 A 受扰动后其特征值的表现形式如定理 1所示。
定理1 若系统矩阵A的元素产生扰动
其中,ε为小参数。则扰动后的特征值为
则有
证明 将扰动特征值
其中,
根据文献[15]可推导出
式(23)和式(24)中的D1(λ)与
由特征值与矩阵迹和行列式关系的定义可得
其中,μ为任意常数,则有
对比式(22),可得
引入广义特征向量矩阵
其中,
则有
将式(29)和式(31)分别代入式(23)和式(24),即可证得式(20)。
根据以上分析可知,若矩阵
由于相似变换不改变扰动值的分布中心,但会影响扰动半径。由式(20)和式(32)可以看到,特征值扰动半径与系统矩阵
相应的
其中,
若令
在优化系统零极点灵敏度时,通常不能得到同时使两者达到最优的状态空间实现。最小化零点灵敏度可能优化不了极点灵敏度,甚至会恶化极点灵敏度。然而存在极点与零点扰动都会影响到系统性能的情况,或系统对某些极点(零点)上的扰动更为敏感。对零极点加上特定权重,可以权衡极点与零点灵敏度之间的优化。记系统的加权零极点灵敏度为
其中,ωλ和
将式(12)和式(34)代入M pz中,有
其中
当
因式(38)等价于
可令
整理式(39)得
即可解得最优矩阵
由于
其中,
下面以23阶线性相位FIR低通数字滤波器为例,利用matlab仿真平台分析零极点的灵敏度以及零极点位置偏移对滤波器频响特性的影响,并比较3种优化方案的优化性能。
通带截止频率 fp =1.5 kHz,阻带截止频率fs =2.5 kHz,通带最大衰减αp =1 dB,阻带最小衰减αs =40 dB,采样频率F s=10 kHz,利用 matlab生成系数h(n),如表1所示。
将滤波器的直接型结构转换为状态空间结构,作为最初实现
定义矩阵
实现 R 分别通过矩阵
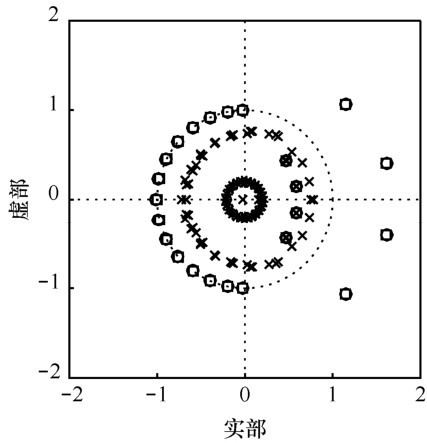
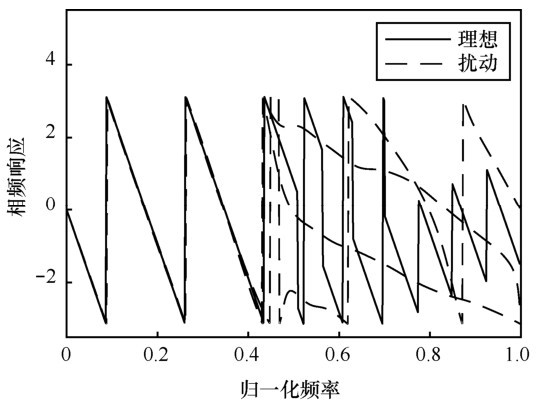
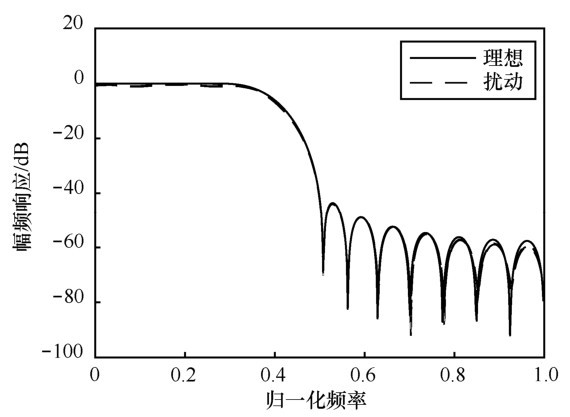
为进一步分析零极点对滤波器系数变化的灵敏性,仿真中以扰动方式体现系数变化。产生一个扰动
通过表3可知,由式(20)解得的特征值
现验证上述理论数值结果,对状态空间实现
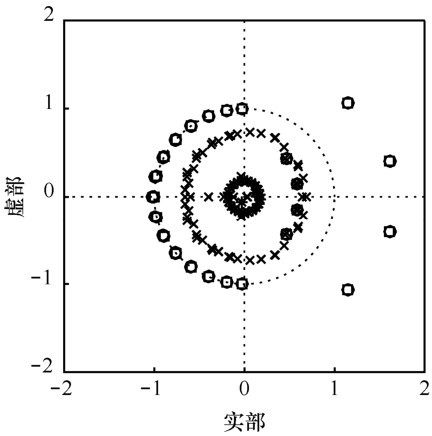
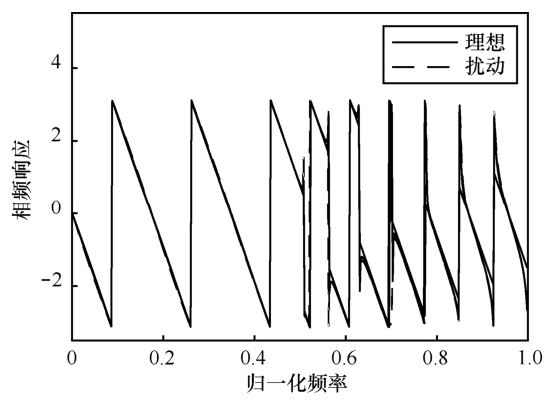
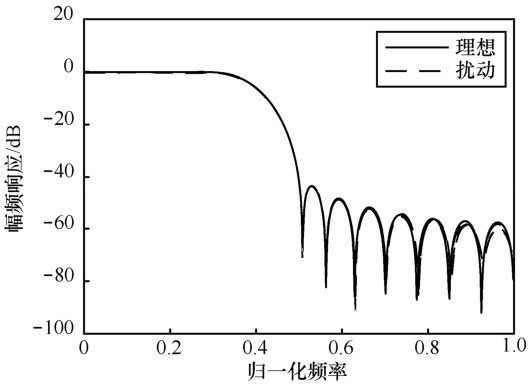
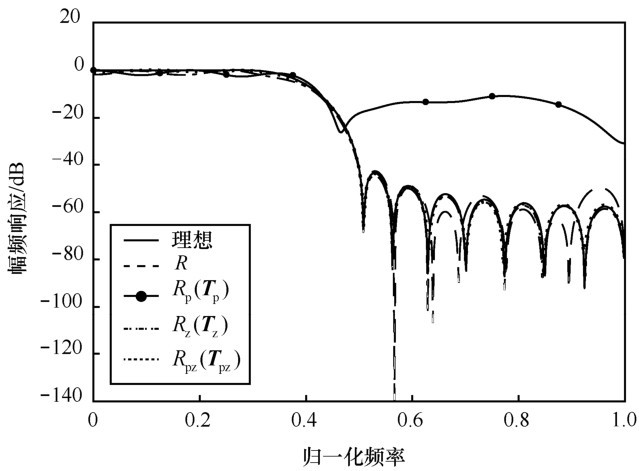
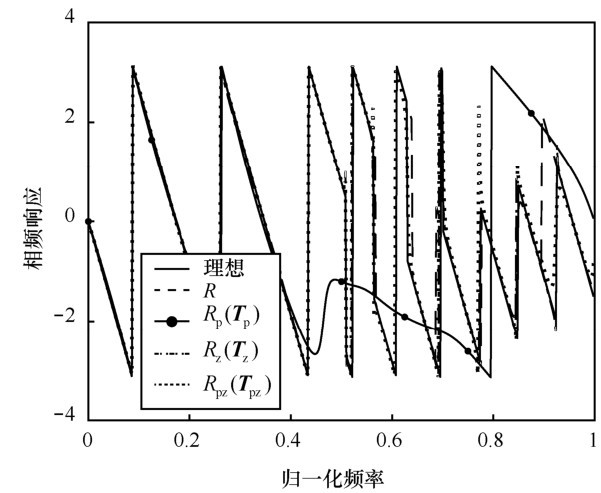
由表2及仿真结果表明,系统系数上的误差会影响零极点的分布位置,并且不同实现在零极点灵敏度上表现出不同的数值特性。对比图1中的原实现R,图2中优化实现
需要说明的是,FIR滤波器的系统矩阵
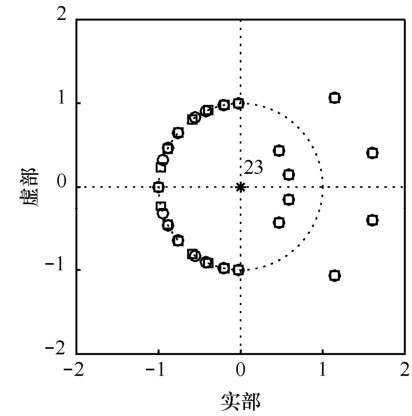
为对比上述不同状态空间实现在有限精度表示下的性能,考虑以10 bit量化舍入表示每种实现结构参数的小数位。图13为实现R量化后零极点分布,其中,“□”与“*”表示理想精度下的零点和极点位置,“○”与“×”表示量化后的零点和极点位置。
由图13可知,原实现R的A矩阵元素均为平凡参数(即0或±1),平凡参数对有限字长效应不敏感,极点位置没有偏移,但零点是由矩阵
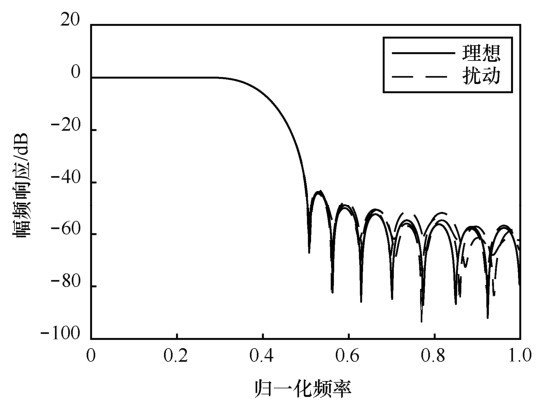
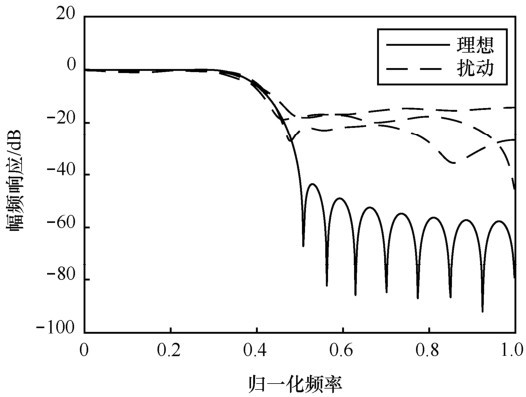
本文基于状态空间实现结构讨论FIR滤波器的零极点灵敏度,引用广义特征向量对亏损系统矩阵A的特征值进行扰动分析,推导出极点灵敏度表达式,并提出FIR滤波器极点、零点及加权零极点灵敏度的优化方案。数值实例表明,由于系统矩阵A的亏损性使FIR滤波器极点敏感于系数变化,零极点位置偏移会影响滤波器的频响特性,仿真结果验证了所提方案的有效性,即优化实现能够降低滤波器零极点的灵敏度。









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}