1 引言
多目标跟踪是当前信息融合和计算机视觉领域的热点问题。检测的不确定性、量测的不确定性及关联的不确定性使多目标跟踪非常复杂[1 ] ,尤其在雷达对海探测环境下,目标速度慢、杂波剩余多等因素使目标连续跟踪异常困难。目前,常见的多目标跟踪方法主要包括联合概率数据关联(JPDA,joint probabilistic data association)、多假设跟踪(MHT,multiple hypotheses tracking)、随机有限集(RFS,random finite set)等[2 ] 。JPDA和MHT的实现过程是先进行数据关联,再进行单目标滤波。当量测数目增加时,数据关联运算量呈指数级增长。近年来,基于 RFS 的多目标跟踪方法受到了很多关注,该方法将多目标状态和传感器量测分别建模为随机有限集,通过贝叶斯多目标滤波公式实现多目标后验概率密度的递归估计。与JPDA和MHT等传统跟踪方法不同的是,许多RFS方法不考虑数据关联也可以得到准确的多目标滤波结果,如概率假设密度(PHD,probability hypothesis density)滤波器[3 ] 、势概率假设密度(CPHD,cardinalized PHD)滤波器[4 ] 、多伯努利(MB,multi-Bernoulli)滤波器[5 ] 。这3种方法由于实现过程简单、计算效率高等优点获得了大量应用,尤其是MB滤波器,其计算复杂度和 PHD 相似,其序贯蒙特卡罗(SMC,sequential Monte Carlo)实现不需要聚类便能提取目标状态,因而在多目标滤波中更具优势。
在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难。如果设定的参数值与真实值不一致,滤波器的性能便会下降。近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究。针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] 。文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差。针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域。文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计。
RMB 滤波器在计算量测似然时,只利用目标和杂波的运动状态(如位置、速度等)信息,当目标和杂波相距较近时,多目标滤波效果欠佳。由于雷达回波不仅包含目标的运动状态信息,还包含幅度信息(AI,amplitude information),利用目标的幅度信息来改进量测似然,提升对目标和杂波的区分能力,实现更加准确的多目标滤波是一个可行的方法。
利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 。前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小。
目前,AIAOT 领域已取得许多成果。Lerro等[20 ,21 ] 首先提出了 AIAOT 的基本理论,随后Ehrman等[22 ] 和Brekke等[23 ,24 ] 对AIAOT进行了深入研究。文献[20 ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景。对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] 。针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器。
在雷达对海探测中,运动目标的姿态和视角相对雷达经常变化,导致目标的雷达散射截面积(RCS,radar cross section)起伏不定,从而造成目标回波幅度起伏。目前,表征目标 RCS 起伏的模型包括Swerling 模型和 χ2 分布模型等,工程上常用SwerlingI~SwerlingIV 模型,其中,Swerling I型表示RCS在扫描内的脉冲间相关,而两次扫描相互独立,为慢起伏,其概率密度服从瑞利分布。大量海杂波实测数据分析表明,通常海杂波相关时间为毫秒级[30 ] ,服从慢起伏模型,且采用K分布模型能有效拟合较大入射余角范围内的海杂波幅度分布。目前,Swerling I型已广泛应用于描述海上目标RCS的起伏[23 ] 。
本文提出了一种K分布海杂波环境下AI辅助的RMB滤波器(AI-RMB)。首先,将K分布海杂波及Swerling I型起伏目标的幅度似然函数引入稳健多伯努利滤波器,提升对海探测环境下雷达的多目标跟踪性能;其次,与经典 AIAO方法[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 利用幅度信息计算理论检测概率和理论虚警概率不同,本文考虑到 RMB 滤波器的特点,采用贝塔分布迭代估计目标伯努利项的检测概率和杂波伯努利项的虚警概率;最后,为提升计算效率,采用积分表方法计算K分布杂波下的幅度似然函数。仿真实验表明,相较稳健多伯努利滤波器,本文所提方法在多目标状态估计、势估计以及杂波率估计方面性能更优,且运行时间没有显著增加。
2 基本模型
本节给出单个目标运动状态的时间演化模型和雷达的观测模型。
2.1 目标运动模型
假设k时刻第i个目标为近似匀速运动,其运动模型如式(1)所示。
x ˜ k i = F NCV x ˜ k − 1 i + v k i , v k i ∼ N ( 0 , Q ) ( 1 )
其中,x ˜ k i = [ p 1 , k i p 2 , k i p ˙ 1 , k i p ˙ 2 , k i ] T p 1 , k i p 2 , k i p ˙ 1 , k i p ˙ 1 , k i p ˙ 2 , k i v k i
F NCV = [ 1 T 0 0 0 1 0 0 0 0 1 T 0 0 0 1 ]
Q = [ σ v 2 T 3 3 σ v 2 T 2 2 0 0 σ v 2 T 2 2 σ v 2 T 0 0 0 0 σ v 2 T 3 3 σ v 2 T 2 2 0 0 σ v 2 T 2 2 σ v 2 T ]
其中,T和σv 分别为采样间隔和加速度噪声的功率谱密度。
2.2 雷达观测模型
k时刻第i个量测矢量由运动状态相关的量测部分和附加的幅度部分构成。
z k i : = [ z ˜ k i ; a ]
其中,z ˜ k i
z ˜ k i = h ( x ˜ k i ) + w k i , w k i ∼ N ( 0 , R ) ( 2 )
其中,h(⋅)为非线性量测函数,w k i
h ( x k i ) = [ ( p 1 , k i ) 2 + ( p 2 , k i ) 2 arctan p 1 , k i p 2 , k i ] , R = [ σ ρ 2 0 0 σ θ 2 ]
为简化书写,后面将分别采用z和z ˜ z k i z ˜ k i
3 稳健多伯努利滤波器
为了在滤波的同时估计出环境中的杂波率,Vo等[13 ] 提出的RMB滤波器将杂波建模为一类特殊类型的目标(又称为杂波发生器),并分别建立了目标和杂波的状态转移模型和量测模型,通过贝叶斯迭代滤波实现对目标状态和杂波率的估计。
定义 χ ( Δ ) = [ 0 , 1 ] ( 为检测概率的取值空间, χ ˜ = ℝ n x n x χ = χ ( Δ ) × χ ˜ × { 0 , 1 } x = ( α , x ˜ , u ) x ˜ f ( α , x ˜ , u ) = f u ( α , x ˜ )
假设在k-1时刻,多目标概率密度可表示为如式(3)所示的多伯努利随机集。
π k − 1 = { ( r k − 1 ( i ) , p u , k − 1 ( i ) ) } i = 1 M k − 1 ( 3 )
其中,r k − 1 ( i ) p u , k − 1 ( i ) M k − 1
π k | k − 1 = { ( r Γ , k ( i ) , p Γ , k ( i ) ) } i = 1 M Γ , k ∪ { ( r P , k | k − 1 ( i ) , p P , u , k | k − 1 ( i ) ) } i = 1 M k − 1 ( 4 )
r P , k | k − 1 ( i ) = r k − 1 ( i ) ∑ u = 0 , 1 〈 p u , k − 1 ( i ) , p S , u , k 〉 ( 5 )
p P , u , k | k − 1 ( i ) ( α k , x ˜ k ) = 〈 f u , k | k − 1 ( α k , x ˜ k | ⋅ , ⋅ ) , p u , k − 1 ( i ) p S , u , k 〉 〈 p u , k − 1 ( i ) , p S , u , k 〉 ( 6 )
其中,r P , k | k − 1 ( i ) p P , u , k | k − 1 ( i ) f u , k | k − 1
f u , k | k − 1 ( α k , x ˜ k | ⋅ , ⋅ ) = f Δ , u ( α k | α k − 1 ) f χ ˜ , u ( x ˜ k | x ˜ k − 1 ) ( 7 )
其中,fΔ,u 和f χ ˜ , u
将式(4)中预测的多目标密度表示为如式(8)的多伯努利随机集。
π k | k − 1 = { ( r k | k − 1 ( i ) , p u , k | k − 1 ( i ) ) } i = 1 M k | k − 1 ( 8 )
则k时刻后验多目标密度可表示为漏检多伯努利随机集和经量测更新的多伯努利随机集的并集。
π k = { ( r L , k ( i ) , p L , u , k ( i ) ) } i = 1 M k | k − 1 ∪ { ( r U , k ( z ˜ ) , p U , u , k ( ⋅ ; z ˜ ) ) } z ˜ ∈ Z k ( 9 )
r L , k ( i ) = ∑ u = 0 , 1 r L , u , k ( i ) ( 10 )
r L , u , k ( i ) = r k | k − 1 ( i ) 〈 p u , k | k − 1 ( i ) , 1 − p D , u , k 〉 1 − r k | k − 1 ( i ) ∑ u ′ = 0 , 1 〈 p u ′ , k | k − 1 ( i ) , p D , u ′ , k 〉 ( 11 )
p L , u , k ( i ) ( α , x ˜ ) = ( 1 − p D , u , k ) p u , k | k − 1 ( i ) ( x ˜ ) ∑ u ′ = 0 , 1 〈 p u ′ , k | k − 1 ( i ) , 1 − p D , u ′ , k 〉 ( 12 )
r U , k ( z ˜ ) = ∑ u = 0 , 1 r U , u , k ( z ˜ ) ( 13 )
r U , u , k ( z ˜ ) =
∑ i = 1 M k | k − 1 r k | k − 1 ( i ) ( 1 − r k | k - 1 ( i ) ) 〈 p u , k | k − 1 ( i ) , g u , k ( z ˜ | x ˜ ) p D , u , k 〉 ( 1 − r k | k − 1 ( i ) ∑ u ′ = 0 , 1 〈 p u ′ , k | k − 1 ( i ) , p D , u ′ , k 〉 ) 2 ∑ i = 1 M k | k − 1 r k | k − 1 ( i ) ∑ u ′ = 0 , 1 〈 p u ′ , k | k − 1 ( i ) , g u ′ , k ( z ˜ | x ˜ ) p D , u ′ , k 〉 ( 1 − r k | k − 1 ( i ) ∑ u ′ = 0 , 1 〈 p u ′ , k | k − 1 ( i ) , p D , u ′ , k 〉 ) ( 14 )
p U , u , k ( α , x ˜ ; z ˜ ) =
∑ i = 1 M k | k − 1 r k | k − 1 ( i ) ( 1 − r k | k − 1 ( i ) ) p u , k | k − 1 ( i ) ( x ˜ ) g u , k ( z ˜ | x ˜ ) p D , u , k ∑ u ′ = 0 , 1 ∑ i = 1 M k | k − 1 r k | k − 1 ( i ) ( 1 − r k | k − 1 ( i ) ) 〈 p u ′ , k | k − 1 ( i ) , g u ′ , k ( z ˜ | x ˜ ) p D , u ′ , k 〉 ( 15 )
其中,r L , u , k ( i ) p L , u , k ( i ) U,u,k 和pU,u,k 分别为经k时刻每一个量测z ˜ ∈ Z k p D , u , k u,k 为量测似然函数。
4 基于AI的稳健多伯努利滤波器
在上述RMB迭代中,多目标后验密度更新时仅利用了与运动状态相关的量测。本文引入目标和杂波的幅度信息,建立了目标和杂波的幅度量测似然,并将其加入更新过程,从而构成AI-RMB滤波器。由于 AI-RMB 和 RMB 的预测部分完全相同,为节省篇幅,这里只给出AI-RMB的更新部分。
4.1 幅度的似然函数
假设目标的幅度d和运动状态相互独立,则目标的量测似然函数g ( z | x ) c ( z ) [21 ]
g ( z | x ) = g z ˜ ( z ˜ | x ˜ ) g a ( a | d ) , a ≥ 0 ( 16 )
c ( z ) = c z ˜ ( z ˜ ) c a ( a ) , a ≥ 0 ( 17 )
其中,g z ˜ ( z ˜ | x ) c z ˜ ( z ˜ ) a (a|d)和ca (a)分别为目标和杂波关于幅度的似然函数。由此计算检测概率p D τ p FA τ
p D τ = ∫ τ ∞ g a ( a | d ) d a ( 18 )
p FA τ = ∫ τ ∞ c a ( a ) d a ( 19 )
其中,τ为检测门限。则经过门限检测后,目标和杂波的幅度似然函数分别为
g a τ ( a | d ) = 1 p D τ g a ( a | d ) , a > τ ( 20 )
c a τ ( a ) = 1 p F A τ c a ( a ) , a > τ ( 21 )
4.2 AI-RMB滤波器
如果在k时刻,预测的多目标密度可表示为如式(22)所示的多伯努利随机集。
π k | k − 1 = { ( r k | k − 1 ( i ) , p u , k | k − 1 ( i ) ) } i = 1 M k | k − 1 ( 22 )
其中,r k | k − 1 ( i ) p u , k | k − 1 ( i ) M k | k − 1 k 更新的多伯努利随机集的并集。
π k = { ( r L , k ( i ) , p L , u , k ( i ) ) } i = 1 M k | k − 1 ∪ { ( r U , k ( z ) , p U , u , k ( ⋅ ; z ) ) } z ∈ Z k ( 23 )
r L , k ( i ) = ∑ u = 0 , 1 r L , u , k ( i ) ( 24 )
r L , u , k ( i ) = r k | k − 1 ( i ) 〈 p u , k | k − 1 ( i ) , 1 − p D , u , k 〉 1 − r k | k − 1 ( i ) ∑ u ′ = 0 , 1 〈 p u ′ , k | k − 1 ( i ) , p D , u ′ , k 〉 ( 25 )
p L , u , k ( i ) ( x ˜ ) = ( 1 − p D , u , k ) p u , k | k − 1 ( i ) ( x ˜ ) ∑ u ′ = 0 , 1 〈 p u ′ , k | k − 1 ( i ) ( x ˜ ) , 1 − p D , u ′ , k 〉 ( 26 )
r U , k ( z ) = ∑ u = 0 , 1 r U , u , k ( z ) ( 27 )
r U , u , k ( z ) =
∑ i = 1 M k | k − 1 r k | k − 1 ( i ) ( 1 − r k | k − 1 ( i ) ) 〈 p u , k | k − 1 ( i ) , g u , k ( z ˜ | x ˜ ) g u , k τ ( a | d ) p D , u , k 〉 ( 1 − r k | k − 1 ( i ) ∑ u ′ = 0 , 1 〈 p u ′ , k | k − 1 ( i ) , p D , u ′ , k 〉 ) 2 ∑ i = 1 M k | k − 1 r k | k − 1 ( i ) ∑ u ′ = 0 , 1 〈 p u ′ , k | k − 1 ( i ) , g u ′ , k ( z ˜ | x ˜ ) g u ′ , k τ ( a | d ) p D , u ′ , k 〉 ( 1 − r k | k − 1 ( i ) ∑ u ′ = 0 , 1 〈 p u ′ , k | k − 1 ( i ) , p D , u ′ , k 〉 ) ( 28 )
p U , u , k ( α , x ˜ ; z ) =
∑ i = 1 M k | k − 1 r k | k − 1 ( i ) ( 1 − r k | k − 1 ( i ) ) p u , k | k - 1 ( i ) ( x ˜ ) g u , k ( z ˜ | x ˜ ) g u , k τ ( a | d ) p D , u , k ∑ u ′ = 0 , 1 ∑ i = 1 M k | k − 1 r k | k − 1 ( i ) ( 1 − r k | k − 1 ( i ) ) 〈 p u ′ , k | k − 1 ( i ) , g u ′ , k ( z ˜ | x ˜ ) g u ′ , k τ ( a | d ) p D , u ′ , k 〉 ( 29 )
其中,r L , u , k ( i ) p L , u , k ( i ) U,u,k 、pU,u,k 、pD,u,k 和gu,k 的意义与 RMB 滤波器中相同,g u , k τ
g u , k τ ( a | d ) = { g a τ ( a | d ) , u = 1 c a τ ( a ) , u = 0 ( 30 )
在式(25)、式(26)、式(28)和式(29)中,目标和杂波的检测概率pD,u,k 虽然可以通过式(18)和式(19)求得理论值,但该值不能直接应用于AI-RMB的更新过程。其原因如下:一方面,与仅用于估计多目标状态的 MB 滤波器不同,RMB 滤波器不仅需要估计目标状态,还要在滤波的过程中估计出杂波率,由于通常情况下虚警概率比检测概率低得多(相差几个数量级),如果采用式(18)和式(19)计算出的理论检测概率,将会导致杂波伯努利项的权重过低,经过航迹修剪和合并,这些项很可能丢失,从而无法实现对杂波率的估计;另一方面,由式(18)计算出的理论检测概率并不能准确反映RMB中每个目标伯努利项的检测概率,这是因为只有在RMB滤波器中的目标伯努利项数与实际目标数完全一致的情况下才能准确表示目标伯努利项的检测概率,同样,由式(19)计算出的理论虚警概率也不能准确反映RMB 中每个杂波伯努利项的检测概率。基于上述两方面原因,本文在计算检测概率和虚警概率时,摒弃了常规AI OT [20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 中所采用的方法,而是采用贝塔分布来迭代估计每个伯努利项的检测概率和虚警概率。
4.3 K分布海杂波及目标的幅度似然函数
幅度服从K分布的海杂波具有如式(31)所示的概率密度函数(PDF,probability density function)。
c a ( a ) = p ( a ; v , b ) = 4 a v b v + 1 G ( v ) K v − 1 ( 2 a b ) ( 31 )
其中,G(⋅)表示Gamma函数,Kv 表示第二类修正贝塞尔函数,v是形状参数,b是尺度参数。则根据式(19)可得海杂波的虚警概率为
p F A τ = 2 a v b v Γ ( v ) K v ( 2 τ b ) ( 32 )
通过K分布杂波的复合解释[23 ] ,可得Swerling I型起伏目标加杂波的PDF为
g a ( a | d ) =
a b v Γ ( v ) ∫ 0 ∞ η v - 1 η + d exp ( − η b − a 2 2 ( η + d ) ) d η ( 33 )
p D τ = ( 2 b ) v Γ ( v ) ∫ 0 ∞ η v - 1 exp ( − 2 η b − τ 2 2 ( η + d ) ) d η ( 34 )
c a τ ( a ) = 4 a v b v + 1 Γ ( v ) K v − 1 ( 2 a b ) 1 − 2 a v b v Γ ( v ) K v ( 2 τ b ) ( 35 )
g a τ ( a | x ) = a b v Γ ( v ) ∫ 0 ∞ g ( η ) d η ( 2 b ) v Γ ( v ) ∫ 0 ∞ h ( η ) d η ( 36 )
g ( η ) = η v - 1 η + d exp ( − η b − a 2 2 ( η + d ) )
h ( η ) = η v - 1 exp ( − 2 η b − τ 2 2 ( η + d ) )
式(36)中分子和分母的积分都没有闭合解。针对这一问题,Brekke等[23 ] 提出了一种采用网格的数值积分方法,以对g(η)的积分为例说明如下。
η = 1 u 2 ⇒ d η = − 2 u 3 d u ( 37 )
a b v Γ ( v ) ∫ 0 ∞ g ( η ) d η = a b v Γ ( v ) ∫ 0 ∞ q ( u ) d u ( 38 )
q ( u ) = 2 u 1 − 2 v 1 + u 2 d exp ( − 1 u 2 b − u 2 a 2 2 ( 1 + u 2 d ) )
q(u)的极值up 可通过对q(u)求一阶导数得到,如式(39)所示。
0 = ( u p 2 ) 3 [ ( 1 − 2 v ) d 2 − 2 d 2 ] +
( u p 2 ) 2 [ 2 ( 1 − 2 v ) d − 2 d + 4 b d 2 − 2 a 2 ] + ( 39 )
u p 2 [ 1 − 2 v + 8 b d ] + 4 b
当u→∞时,q(u)与u − 1 − 2 v
[ 1 , 2 , ⋯ , N lower u ] 2 u p N lower u
2 u p + A exp ( B [ 1 , 2 , ⋯ , N upper u ] )
为了覆盖q(u)的有效支撑域,设置采样的上限为u p ( 2 + 1 ε 1 2 v )
A = 2 u p N lower u exp ( − B )
B = 1 N upper u exp ( 1 v ln ( u p v ε ) − ln ( 2 u p N lower u ) )
这一数值积分方法准确性很高,但是计算量很大,不利于实时应用。为实现式(36)中积分的快速计算,本文制作了积分表(InT,integral table)。当需要计算式(36)的积分时,只需要根据 K 分布杂波的参数和量测幅度到积分表中查找相应的积分值即可。由于积分表是在算法执行前离线制作的,不消耗运行时间,因而可使海杂波中目标幅度似然的计算效率大大提升。具体操作步骤如下。
步骤1 根据杂波参数b、v以及可能的信杂比,设定量测幅度a的可能取值。为了保证积分表在较大的信杂比范围内可用,a的取值范围要尽可能大。
步骤2 利用Brekke提出的网格法计算杂波参数b、v以及量测a取不同值时的积分值,制作成积分表。
步骤3 根据参数b、v以及a的取值,从积分表中提取相应的积分值,完成式(36)中积分的计算。
5 仿真
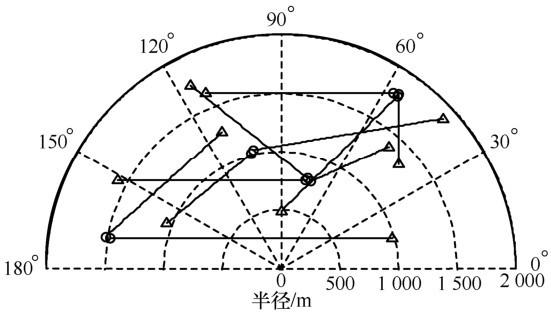
为检验所提AI-RMB的性能,通过仿真实验将其与MB滤波器和RMB滤波器进行对比。对海雷达观测区域如下:方位为0°~180°,距离为0~2 000 m。在总计100 s的观测时间内先后有10个目标进入观测区域,每个目标都为匀速运动。目标的真实轨迹如图1 所示,其中,○表示航迹起点,△表示航迹终点。
图1
每一帧中杂波数服从均值为1 000的泊松分布,海杂波幅度服从参数为v=4,b=0.25的K分布,空间分布为方位-距离上的均匀分布,但在直角坐标系中为非均匀分布。所有目标的平均信杂比为
SCR = 10 lg ( 2 d v b ) = 15 dB
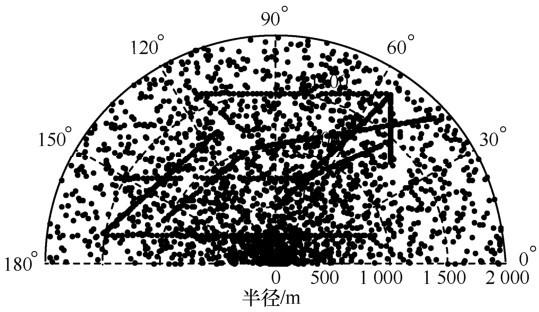
目标的幅度测量值服从Swerling I型起伏。虚警概率设为 0.02,则根据式(32)可求得该信杂比下的检测门限。当杂波和目标的量测幅度超过检测门限时生成量测点迹。理论上检测后杂波的数目服从均值为20的泊松分布,且在方位-距离上服从均匀分布,但在平面直角坐标系上为非均匀分布。检测后包含目标和杂波的量测点迹如图2 所示。
图2
目标增广状态为x = ( a , x ˜ , u ) k 和tk 的贝塔分布β ( ⋅ ; s k , t k ) w =15 m/s2 。杂波的运动状态为二维位置矢量x ˜ = [ p 1 p 2 ] T f χ , 0 ( x ˜ k | x ˜ k − 1 ) = N ( x ˜ k ; x ˜ k − 1 , P 0 , k | k − 1 ) P 0 , k | k − 1 = diag ( [ σ x 2 , σ y 2 ] ) x =1 000 m,σy =500 m量测噪声中,距离和方位的协方差分别为σρ =5m,σ θ = π 180 rad
目标的存在概率为pS,1,k =0.99,虚警的存在概率为pS,0,k =0.9。目标和杂波的检测概率的转移密度为如下的贝塔分布。
f Δ , 1 ( a k | a k − 1 ) = β ( a k ; s 1 , k | k − 1 , t 1 , k | k − 1 )
s 1 , k | k − 1 = ( μ a , 1 , k | k − 1 ( 1 − μ a , 1 , k | k − 1 ) [ σ a , 1 , k | k − 1 ] 2 − 1 ) μ a , 1 , k | k − 1
t 1 , k | k − 1 = ( μ a , 1 , k | k − 1 ( 1 − μ a , 1 , k | k − 1 ) [ σ a , 1 , k | k − 1 ] 2 − 1 ) ( 1 − μ a , 1 , k | k − 1 )
并给定均值μ a , 1 , k | k − 1 = a k − 1 σ a , 1 , k | k − 1 = 0.01 σ a , 0 , k | k − 1 = 0.07
p Γ,1, k = { ( r Γ, k ( i ) , p Γ,1, k ( i ) ) } i = 1 4
其中,存在概率为r Γ, k ( 1 ) = r Γ, k ( 2 ) = 0.02 r Γ, k ( 3 ) = r Γ, k ( 4 ) = 0.03
p Γ,1, k ( i ) ( a k , x ˜ k ) = β ( a ; s Γ,1, k , t Γ,1, k | ) N ( x ˜ k ; m Γ,1, k ( i ) , P Γ,1, k ( i ) )
新生目标贝塔分布的参数为s Γ,1, k = 85 t Γ,1, k | = 15
m Γ,1, k ( 1 ) = [ − 1 500 , 0 , 250 , 0 ] T
m Γ,1, k ( 2 ) = [ − 250 , 0 , 1 000 , 0 ] T
m Γ,1, k ( 3 ) = [ 250 , 0 , 750 , 0 ] T
m Γ,1, k ( 4 ) = [ 1 000 , 0 , 1 500 , 0 ] T
p Γ,0, k = { ( r Γ, k ( i ) , p Γ,0, k ( i ) ) } i = 1 20
其中,r Γ, k ( i ) = 0.1 p Γ,0, k ( i ) ( a k , x ˜ k ) = β ( a ; s Γ,0, k , t Γ,0, k | ) U ( x ˜ k ) s Γ,0, k | = 10 t Γ,0, k | = 90 U ( ⋅ )
本文通过计算每种算法的 OSPA 位置误差和OSPA势误差[31 ] 来评价算法的跟踪性能。
e ¯ p , l o c ( c ) ( X , Y ) : = ( 1 n min π ∈ ∏ n ∑ i =1 m d ( c ) ( x i , y π ( i ) ) p ) 1 p
e ¯ p,card ( c ) ( X , Y ) : = ( c p ( n − m ) n ) 1 p
其中,X = { x 1 , ⋯ , x m } Y = { y 1 , ⋯ , y n } m 、 n ∈ ℕ 0 = { 0 , 1 , 2 ⋯ }
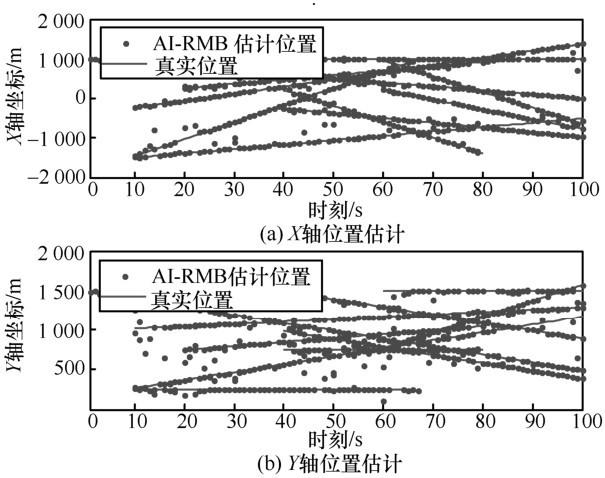
图3 ,图4 ,图5 为MB、RMB和AI-RMB在某次实验中的滤波效果。从图3 ,图4 ,图5 可以看到,参数设置完全正确的MB性能最优,只产生了很少的漏检和虚假航迹;AI-RMB次之,产生了更多的漏检和虚假航迹;未采用幅度信息的RMB性能最差,产生了大量漏检和虚假航迹。
图3
图4
图5
图6 给出了MB、RMB和AI-RMB进行30次仿真后的平均OSPA误差,其中,图6 (a)是OSPA位置误差,图6 (b)是OSPA势误差。从图6 可以看到,参数配置正确的 MB 位置误差最小;AI-RMB的位置估计和势估计误差都明显小于未采用幅度信息的RMB。这是因为,RMB在计算量测似然时只利用了目标和杂波的运动信息,当目标和杂波距离较近时难以区分,从而影响目标粒子和杂波粒子权重的计算,造成目标状态估计性能下降。而采用幅度信息可以更好地区分目标和杂波,从而提升目标的状态估计性能。
图7 是MB、RMB和AI-RMB在30次仿真后的平均势估计效果。从图7 可以看到,这3种算法都能比较准确地估计出目标数目。但是,当目标数增多时(即第60 s~80 s),未采用幅度信息的RMB产生了比较明显的欠估计,而采用幅度信息辅助的AI-RMB以及参数配置完全正确的MB对目标数目的估计更加准确。
图6
图7
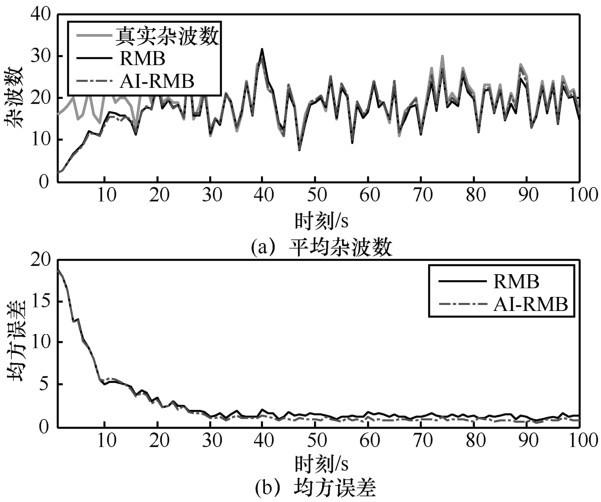
图8 是RMB和AI-RMB对杂波数目的估计结果,其中,图8 (a)为某次仿真中每一帧的真实杂波数目和2种算法估计的杂波数目,图8 (b)为30次仿真后2种算法对杂波数目估计的均方根误差对比。从图8 可以看出,在开始的大约20帧中,2种算法对杂波数目的估计都存在比较大的误差,且误差大小一致,但误差随滤波时间的增加而迅速降低。在20帧之后,2种算法的误差基本上都达到了一个稳定的状态,容易看到采用幅度信息辅助的AI-RMB的误差小于未采用幅度信息的RMB。
表1 为通过30次仿真实验统计出的MB、RMB、未采用积分表的AI-RMB和采用积分表的AI-RMB (InT)的平均运行时间。MB、RMB和AI-RMB的计算复杂度均与当前时刻的量测数和目标数成正比,即O ( | Z k | × | X k | ) k |都比较小。RMB的运行时间约为MB的6倍,这是因为该滤波器需要同时估计目标和杂波,因此每个时刻的|Xk |都比较大。从仿真设置可以看到,在每个时刻,MB的新生目标项数为4,而RMB为24,为MB的6倍,因此其计算复杂度也应为MB的6倍,这与仿真结果是一致的。理论上,AI-RMB的计算复杂度与RMB 相同,但由于幅度似然函数的计算中需要对K分布求积分,而该积分没有解析表达式,只能通过数值积分求解,因此大大消耗了运行时间。从表1 还可以看到,未采用积分表的AI-RMB的运行时间远远大于 RMB,而采用积分表的AI-RMB(InT)的运行时间则降低到接近RMB的水平。
图8
6 结束语
稳健多伯努利滤波器适用于杂波强度和检测概率未知的场景,因而在雷达对海探测环境下具有重要的应用价值。但该滤波器仅利用与目标运动状态相关的量测计算似然函数,当目标和杂波距离较近时性能不佳。针对这一问题,本文基于K分布海杂波和 Swerling I 型起伏目标建立了幅度似然函数,并将其引入该滤波器的更新过程,以提升算法对目标和杂波的区分能力;在配置检测概率时,舍弃常规方法中利用目标和杂波幅度计算理论检测概率和理论虚警概率的思路,采用贝塔分布迭代估计每个目标伯努利项的检测概率和每个杂波伯努利项的虚警概率。仿真实验表明,本文所提方法在目标状态估计、势估计及杂波数估计方面均优于稳健多伯努利滤波器。且通过使用积分表,所提方法的计算效率与稳健多伯努利滤波器相当。
The authors have declared that no competing interests exist.
作者已声明无竞争性利益关系。
参考文献
View Option
[1]
MAHLER R . Statistical multisource-multitarget information fusion
[M]. London : Artech HousePress , 2007 .
[本文引用: 1]
[2]
VO B N , MALLICK M , BAR-SHALOM Y ,et al . Multitarget tracking
[M]. Manhattan : John Wiley & SonsPress , 2015 .
[本文引用: 1]
[3]
MAHLER R . Multitarget Bayes filtering via first-order multitarget moments
[J]. IEEE Transactions on Aerospace and Electronic Systems , 2003 ,39 (4 ): 1152 -1178 .
[本文引用: 1]
[4]
王慧斌 , 陈哲 , 王鑫 ,等 . 基于随机有限集的UPF-CPHD多目标跟踪
[J]. 通信学报 , 2012 ,33 (12 ): 147 -153 .
[本文引用: 1]
WANG H B , CHEN Z , WANG X ,et al . Random finite sets based UPF-CPHD multi-object tracking
[J]. Journal on Communications , 2012 ,33 (12 ): 147 -153 .
[本文引用: 1]
[5]
VO B T , VO B N , CANTONI A . The cardinality balanced multitarget multi-Bernoulli filter and its implementations
[J]. IEEE Transactions on Signal Processing , 2009 ,57 (2 ): 409 -423 .
[本文引用: 1]
[6]
GUISEPPE P , PAOLO B , STEVEN H . Multisensor adaptive Bayesian tracking under time-varying target detection probability
[J]. IEEE Transactions on Aerospace and Electronic Systems , 2016 ,52 (5 ): 2193 -2209 .
[本文引用: 1]
[7]
LIAN F , HAN C , LIU W . Estimating an unknown clutter intensity with finite mixture models for the probability hypothesis density filter
[J]. IEEE Transactions on Aerospace and Electronic Systems , 2010 ,46 (4 ): 2066 -2078 .
[本文引用: 1]
[8]
CHEN X , THARMARASA R , PELLERTIER M ,et al . Integrated clutter estimation and target tracking using poisson point processes
[J]. IEEE Transactions on Aerospace and Electronic Systems. , 2012 ,48 (2 ): 1210 -1235 .
[本文引用: 1]
[9]
CHEN X , THARMARASA R , KIRUBARAJAN T ,et al . Online clutter estimation using a gaussian kernel density estimator for multitarget tracking
[J]. IET Radar,Sonar and Navigation , 2015 ,9 (1 ): 1 -9 .
[本文引用: 1]
[10]
LIU W , CUI H , WEN C . A time-varying clutter intensity estimation algorithm by using Gibbs sampler and BIC
[C]// International Conference on Information Fusion . 2016 : 978 -985 .
[本文引用: 1]
[11]
MAHLER R , VO B T , VO B N . CPHD filtering with unknown clutter rate and detection profile
[J]. IEEE Transactions on Signal Processing , 2011 ,59 (8 ): 3497 -3513 .
[本文引用: 2]
[12]
BEARD M , VO B T , VO B N . Multi-target filtering with unknown clutter density using a bootstrap GMCPHD filter
[J]. IEEE Signal Processing Letters , 2013 ,20 (4 ): 323 -326 .
[本文引用: 3]
[13]
VO B T , VO B N , HOSEINNEZHAD R ,et al . Robust multi-Bernoulli filtering
[J]. IEEE Journal of Selected Topics Signal in Signal Processing , 2013 ,7 (3 ): 399 -409 .
[本文引用: 3]
[14]
GOSTAR A , HOSEINNEZHAD R , BAB-HADIASHAR A . Multi-Bernoulli sensor-selection for multi-target tracking with unknown clutter and detection profiles
[M]. Elsevier North-Holland,Inc , 2016 .
[本文引用: 1]
[15]
REZATOFIGHI S , GOULD S , Vo B T . Multi-target tracking with time-varying clutter rate and detection profile:application to time-lapse cell microscopy sequences
[J]. IEEE Transactions on Medical Imaging , 2015 ,34 (6 ): 1336 -1348 .
[本文引用: 1]
[16]
DU Y K , JEON M . Robust multi-Bernoulli filtering for visual tracking
[C]// International Conference on Control,Automation and Information Sciences . 2015 : 47 -51 .
[本文引用: 1]
[17]
冯新喜 , 魏帅 , 王泉 ,等 . 鲁棒标签多伯努利机动目标跟踪算法
[J]. 华中科技大学学报(自然科学版) , 2018 ,46 (2 ): 56 -60 .
[本文引用: 1]
FENG X X , WEI S , WANG Q ,et al . Robust labeled multi-Bernoulli filter for maneuvering target tracking
[J]. Journal of Huazhong University of Science & Technology (Natural Science Edition) , 2018 ,46 (2 ): 56 -60 .
[本文引用: 1]
[18]
李淼 , 龙云利 , 李骏 ,等 . 采用多伯努利滤波器的过采样点目标检测前跟踪
[J]. 光学精密工程 , 2015 ,23 (12 ): 3446 -3455 .
[本文引用: 1]
LI M , LONG Y L , LI J ,et al . Oversampling point target track-before-detect by multi-Bernoulli filter
[J]. Optics and Precision Engineering , 2015 ,23 (12 ): 3446 -3455 .
[本文引用: 1]
[19]
李翠芸 , 李宁 , 姬红兵 . 多伯努利滤波的快速红外弱小目标检测与跟踪
[J]. 西安电子科技大学学报 , 2016 ,43 (4 ): 69 -74 .
[本文引用: 1]
LI C Y , LI N , JI H B . Fast IR dim small targets detection and tracking based on the Multi-Bernoulli filter
[J]. Journal of Xidian University , 2016 ,43 (4 ): 69 -74 .
[本文引用: 1]
[20]
LERRO D , BAR-SHALOM Y , . Automated tracking with target amplitude information
[C]// American Control Conference . 1990 : 2875 -2880 .
[本文引用: 5]
[21]
LERRO D , BAR-SHALOM Y . Interacting multiple model tracking with target amplitude feature
[J]. IEEE Transactions on Aerospace and Electronic Systems , 1993 ,29 (2 ): 494 -509 .
[本文引用: 6]
[22]
EHRMAN L M , BLAIR W D . Using target RCS when tracking multiple rayleigh targets
[J]. IEEE Transactions on Aerospace and Electronic Systems , 2010 ,46 (2 ): 701 -716 .
[本文引用: 5]
[23]
BREKKE E , HALLINGSTAD O , GLATTETRE J . Tracking small targets in heavy-tailed clutter using amplitude information
[J]. IEEE Journal of Oceanic Engineering , 2010 ,35 (2 ): 314 -329 .
[本文引用: 8]
[24]
BREKKE E , HALLINGSTAD O , GLATTETRE J . The modified riccati equation for amplitude-aided target tracking in heavy-tailed clutter
[J]. IEEE Transactions on Aerospace and Electronic Systems , 2011 ,47 (4 ): 2874 -2886 .
[本文引用: 5]
[25]
CLARK D , RISTIC B , VO B N ,et al . PHD Filtering with target amplitude feature
[C]// International Conference on Information Fusion . 2008 : 1 -7 .
[本文引用: 4]
[26]
CLARK D , RISTIC B , Vo B N ,et al . Bayesian multi- object filtering with amplitude feature likelihood for unknown object SNR
[J]. IEEE Transactions on Signal Processing , 2010 ,58 (1 ): 26 -37 .
[本文引用: 4]
[27]
LI S , KONG L , YI W ,et al . PHD filter with amplitude information in Weibull clutter
[C]// IEEE Radar Conference . 2013 : 1 -6 .
[本文引用: 4]
[28]
袁常顺 , 王俊 , 孙进平 ,等 . 一种幅度信息辅助多伯努利滤波算法
[J]. 电子与信息学报 , 2016 ,38 (2 ): 464 -471 .
[本文引用: 4]
YUAN C S , WANG J , SUN J P ,et al . A multi-Bernoulli filtering algorithm using amplitude information
[J]. Journal of Electronics and Information Technology , 2016 ,38 (2 ): 464 -471 .
[本文引用: 4]
[29]
YUAN C S , WANG J , PENG L ,et al . Multi-target tracking based on multi-Bernoulli filter with amplitude for unknown clutter rate
[J]. Sensors , 2015 ,15 (12 ): 30385 -30402 .
[本文引用: 4]
[30]
刘恒燕 , 宋杰 , 熊伟 ,等 . 大入射余角海杂波相关特性分析及幅度拟合
[J]. 海军航空工程学院学报 , 2018 ,33 (3 ): 307 -312 .
[本文引用: 1]
LIU H Y , SONG J , XIONG W ,et al . Sea clutter correlation analysis and amplitude fitting for large grazing angle
[J]. Journal of Naval Aeronautical and Astronautical University , 2018 ,33 (3 ): 307 -312 .
[本文引用: 1]
[31]
SCHUHMACHER D , VO B T , VO B N . A consistent metric for performance evaluation of multi object Filters
[J]. IEEE Transactions on Signal Processing , 2008 ,56 (8 ): 3447 -3457 .
[本文引用: 1]
Statistical multisource-multitarget information fusion
1
2007
... 多目标跟踪是当前信息融合和计算机视觉领域的热点问题.检测的不确定性、量测的不确定性及关联的不确定性使多目标跟踪非常复杂[1 ] ,尤其在雷达对海探测环境下,目标速度慢、杂波剩余多等因素使目标连续跟踪异常困难.目前,常见的多目标跟踪方法主要包括联合概率数据关联(JPDA,joint probabilistic data association)、多假设跟踪(MHT,multiple hypotheses tracking)、随机有限集(RFS,random finite set)等[2 ] .JPDA和MHT的实现过程是先进行数据关联,再进行单目标滤波.当量测数目增加时,数据关联运算量呈指数级增长.近年来,基于 RFS 的多目标跟踪方法受到了很多关注,该方法将多目标状态和传感器量测分别建模为随机有限集,通过贝叶斯多目标滤波公式实现多目标后验概率密度的递归估计.与JPDA和MHT等传统跟踪方法不同的是,许多RFS方法不考虑数据关联也可以得到准确的多目标滤波结果,如概率假设密度(PHD,probability hypothesis density)滤波器[3 ] 、势概率假设密度(CPHD,cardinalized PHD)滤波器[4 ] 、多伯努利(MB,multi-Bernoulli)滤波器[5 ] .这3种方法由于实现过程简单、计算效率高等优点获得了大量应用,尤其是MB滤波器,其计算复杂度和 PHD 相似,其序贯蒙特卡罗(SMC,sequential Monte Carlo)实现不需要聚类便能提取目标状态,因而在多目标滤波中更具优势. ...
Multitarget tracking
1
2015
... 多目标跟踪是当前信息融合和计算机视觉领域的热点问题.检测的不确定性、量测的不确定性及关联的不确定性使多目标跟踪非常复杂[1 ] ,尤其在雷达对海探测环境下,目标速度慢、杂波剩余多等因素使目标连续跟踪异常困难.目前,常见的多目标跟踪方法主要包括联合概率数据关联(JPDA,joint probabilistic data association)、多假设跟踪(MHT,multiple hypotheses tracking)、随机有限集(RFS,random finite set)等[2 ] .JPDA和MHT的实现过程是先进行数据关联,再进行单目标滤波.当量测数目增加时,数据关联运算量呈指数级增长.近年来,基于 RFS 的多目标跟踪方法受到了很多关注,该方法将多目标状态和传感器量测分别建模为随机有限集,通过贝叶斯多目标滤波公式实现多目标后验概率密度的递归估计.与JPDA和MHT等传统跟踪方法不同的是,许多RFS方法不考虑数据关联也可以得到准确的多目标滤波结果,如概率假设密度(PHD,probability hypothesis density)滤波器[3 ] 、势概率假设密度(CPHD,cardinalized PHD)滤波器[4 ] 、多伯努利(MB,multi-Bernoulli)滤波器[5 ] .这3种方法由于实现过程简单、计算效率高等优点获得了大量应用,尤其是MB滤波器,其计算复杂度和 PHD 相似,其序贯蒙特卡罗(SMC,sequential Monte Carlo)实现不需要聚类便能提取目标状态,因而在多目标滤波中更具优势. ...
Multitarget Bayes filtering via first-order multitarget moments
1
2003
... 多目标跟踪是当前信息融合和计算机视觉领域的热点问题.检测的不确定性、量测的不确定性及关联的不确定性使多目标跟踪非常复杂[1 ] ,尤其在雷达对海探测环境下,目标速度慢、杂波剩余多等因素使目标连续跟踪异常困难.目前,常见的多目标跟踪方法主要包括联合概率数据关联(JPDA,joint probabilistic data association)、多假设跟踪(MHT,multiple hypotheses tracking)、随机有限集(RFS,random finite set)等[2 ] .JPDA和MHT的实现过程是先进行数据关联,再进行单目标滤波.当量测数目增加时,数据关联运算量呈指数级增长.近年来,基于 RFS 的多目标跟踪方法受到了很多关注,该方法将多目标状态和传感器量测分别建模为随机有限集,通过贝叶斯多目标滤波公式实现多目标后验概率密度的递归估计.与JPDA和MHT等传统跟踪方法不同的是,许多RFS方法不考虑数据关联也可以得到准确的多目标滤波结果,如概率假设密度(PHD,probability hypothesis density)滤波器[3 ] 、势概率假设密度(CPHD,cardinalized PHD)滤波器[4 ] 、多伯努利(MB,multi-Bernoulli)滤波器[5 ] .这3种方法由于实现过程简单、计算效率高等优点获得了大量应用,尤其是MB滤波器,其计算复杂度和 PHD 相似,其序贯蒙特卡罗(SMC,sequential Monte Carlo)实现不需要聚类便能提取目标状态,因而在多目标滤波中更具优势. ...
基于随机有限集的UPF-CPHD多目标跟踪
1
2012
... 多目标跟踪是当前信息融合和计算机视觉领域的热点问题.检测的不确定性、量测的不确定性及关联的不确定性使多目标跟踪非常复杂[1 ] ,尤其在雷达对海探测环境下,目标速度慢、杂波剩余多等因素使目标连续跟踪异常困难.目前,常见的多目标跟踪方法主要包括联合概率数据关联(JPDA,joint probabilistic data association)、多假设跟踪(MHT,multiple hypotheses tracking)、随机有限集(RFS,random finite set)等[2 ] .JPDA和MHT的实现过程是先进行数据关联,再进行单目标滤波.当量测数目增加时,数据关联运算量呈指数级增长.近年来,基于 RFS 的多目标跟踪方法受到了很多关注,该方法将多目标状态和传感器量测分别建模为随机有限集,通过贝叶斯多目标滤波公式实现多目标后验概率密度的递归估计.与JPDA和MHT等传统跟踪方法不同的是,许多RFS方法不考虑数据关联也可以得到准确的多目标滤波结果,如概率假设密度(PHD,probability hypothesis density)滤波器[3 ] 、势概率假设密度(CPHD,cardinalized PHD)滤波器[4 ] 、多伯努利(MB,multi-Bernoulli)滤波器[5 ] .这3种方法由于实现过程简单、计算效率高等优点获得了大量应用,尤其是MB滤波器,其计算复杂度和 PHD 相似,其序贯蒙特卡罗(SMC,sequential Monte Carlo)实现不需要聚类便能提取目标状态,因而在多目标滤波中更具优势. ...
基于随机有限集的UPF-CPHD多目标跟踪
1
2012
... 多目标跟踪是当前信息融合和计算机视觉领域的热点问题.检测的不确定性、量测的不确定性及关联的不确定性使多目标跟踪非常复杂[1 ] ,尤其在雷达对海探测环境下,目标速度慢、杂波剩余多等因素使目标连续跟踪异常困难.目前,常见的多目标跟踪方法主要包括联合概率数据关联(JPDA,joint probabilistic data association)、多假设跟踪(MHT,multiple hypotheses tracking)、随机有限集(RFS,random finite set)等[2 ] .JPDA和MHT的实现过程是先进行数据关联,再进行单目标滤波.当量测数目增加时,数据关联运算量呈指数级增长.近年来,基于 RFS 的多目标跟踪方法受到了很多关注,该方法将多目标状态和传感器量测分别建模为随机有限集,通过贝叶斯多目标滤波公式实现多目标后验概率密度的递归估计.与JPDA和MHT等传统跟踪方法不同的是,许多RFS方法不考虑数据关联也可以得到准确的多目标滤波结果,如概率假设密度(PHD,probability hypothesis density)滤波器[3 ] 、势概率假设密度(CPHD,cardinalized PHD)滤波器[4 ] 、多伯努利(MB,multi-Bernoulli)滤波器[5 ] .这3种方法由于实现过程简单、计算效率高等优点获得了大量应用,尤其是MB滤波器,其计算复杂度和 PHD 相似,其序贯蒙特卡罗(SMC,sequential Monte Carlo)实现不需要聚类便能提取目标状态,因而在多目标滤波中更具优势. ...
The cardinality balanced multitarget multi-Bernoulli filter and its implementations
1
2009
... 多目标跟踪是当前信息融合和计算机视觉领域的热点问题.检测的不确定性、量测的不确定性及关联的不确定性使多目标跟踪非常复杂[1 ] ,尤其在雷达对海探测环境下,目标速度慢、杂波剩余多等因素使目标连续跟踪异常困难.目前,常见的多目标跟踪方法主要包括联合概率数据关联(JPDA,joint probabilistic data association)、多假设跟踪(MHT,multiple hypotheses tracking)、随机有限集(RFS,random finite set)等[2 ] .JPDA和MHT的实现过程是先进行数据关联,再进行单目标滤波.当量测数目增加时,数据关联运算量呈指数级增长.近年来,基于 RFS 的多目标跟踪方法受到了很多关注,该方法将多目标状态和传感器量测分别建模为随机有限集,通过贝叶斯多目标滤波公式实现多目标后验概率密度的递归估计.与JPDA和MHT等传统跟踪方法不同的是,许多RFS方法不考虑数据关联也可以得到准确的多目标滤波结果,如概率假设密度(PHD,probability hypothesis density)滤波器[3 ] 、势概率假设密度(CPHD,cardinalized PHD)滤波器[4 ] 、多伯努利(MB,multi-Bernoulli)滤波器[5 ] .这3种方法由于实现过程简单、计算效率高等优点获得了大量应用,尤其是MB滤波器,其计算复杂度和 PHD 相似,其序贯蒙特卡罗(SMC,sequential Monte Carlo)实现不需要聚类便能提取目标状态,因而在多目标滤波中更具优势. ...
Multisensor adaptive Bayesian tracking under time-varying target detection probability
1
2016
... 在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难.如果设定的参数值与真实值不一致,滤波器的性能便会下降.近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究.针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
Estimating an unknown clutter intensity with finite mixture models for the probability hypothesis density filter
1
2010
... 在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难.如果设定的参数值与真实值不一致,滤波器的性能便会下降.近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究.针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
Integrated clutter estimation and target tracking using poisson point processes
1
2012
... 在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难.如果设定的参数值与真实值不一致,滤波器的性能便会下降.近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究.针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
Online clutter estimation using a gaussian kernel density estimator for multitarget tracking
1
2015
... 在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难.如果设定的参数值与真实值不一致,滤波器的性能便会下降.近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究.针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
A time-varying clutter intensity estimation algorithm by using Gibbs sampler and BIC
1
2016
... 在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难.如果设定的参数值与真实值不一致,滤波器的性能便会下降.近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究.针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
CPHD filtering with unknown clutter rate and detection profile
2
2011
... 在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难.如果设定的参数值与真实值不一致,滤波器的性能便会下降.近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究.针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
... .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
Multi-target filtering with unknown clutter density using a bootstrap GMCPHD filter
3
2013
... 在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难.如果设定的参数值与真实值不一致,滤波器的性能便会下降.近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究.针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
... [12 ].文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
... ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
Robust multi-Bernoulli filtering
3
2013
... 在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难.如果设定的参数值与真实值不一致,滤波器的性能便会下降.近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究.针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
... [13 ]引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
... 为了在滤波的同时估计出环境中的杂波率,Vo等[13 ] 提出的RMB滤波器将杂波建模为一类特殊类型的目标(又称为杂波发生器),并分别建立了目标和杂波的状态转移模型和量测模型,通过贝叶斯迭代滤波实现对目标状态和杂波率的估计. ...
Multi-Bernoulli sensor-selection for multi-target tracking with unknown clutter and detection profiles
1
2016
... 在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难.如果设定的参数值与真实值不一致,滤波器的性能便会下降.近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究.针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
Multi-target tracking with time-varying clutter rate and detection profile:application to time-lapse cell microscopy sequences
1
2015
... 在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难.如果设定的参数值与真实值不一致,滤波器的性能便会下降.近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究.针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
Robust multi-Bernoulli filtering for visual tracking
1
2015
... 在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难.如果设定的参数值与真实值不一致,滤波器的性能便会下降.近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究.针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
鲁棒标签多伯努利机动目标跟踪算法
1
2018
... 在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难.如果设定的参数值与真实值不一致,滤波器的性能便会下降.近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究.针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
鲁棒标签多伯努利机动目标跟踪算法
1
2018
... 在基于RFS的多目标滤波器中,杂波强度(即杂波率和杂波概率密度之积)和检测概率需要根据应用环境设定,但在雷达对海探测中,实时获取这2 个参数非常困难.如果设定的参数值与真实值不一致,滤波器的性能便会下降.近年来,杂波强度和检测概率未知情况下的目标跟踪问题得到了深入研究.针对检测概率未知的情况,Guiseppe 等[6 ] 提出2种自适应跟踪方法;针对杂波强度未知的情况,学者们提出了多种杂波估计算法[7 ,8 ,9 ,10 ] ;针对杂波强度和检测概率均未知的情况,Mahler等[11 ] 提出一种在滤波的同时学习杂波率和检测概率的自适应CPHD滤波器,随后,Beard等[12 ] 在此基础上提出一种自举滤波器[12 ] .文献[11 ,12 ]所提方法采用SMC实现时,需要进行聚类以提取目标状态,当目标的势估计误差较大时,状态估计性能也会变差.针对这一问题,Vo 等[13 ] 提出了稳健多伯努利滤波器(RMB,robust MB),因其SMC实现不需要聚类便能提取目标状态,该方法已应用于传感器选择[14 ] 、生物学研究[15 ] 、视频跟踪[16 ] 等领域.文献[17 ]将稳健滤波思想[13 ] 引入标签多伯努利滤波器,但没有给出杂波率的准确估计. ...
采用多伯努利滤波器的过采样点目标检测前跟踪
1
2015
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
采用多伯努利滤波器的过采样点目标检测前跟踪
1
2015
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
多伯努利滤波的快速红外弱小目标检测与跟踪
1
2016
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
多伯努利滤波的快速红外弱小目标检测与跟踪
1
2016
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
Automated tracking with target amplitude information
5
1990
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
... 目前,AIAOT 领域已取得许多成果.Lerro等[20 ,21 ] 首先提出了 AIAOT 的基本理论,随后Ehrman等[22 ] 和Brekke等[23 ,24 ] 对AIAOT进行了深入研究.文献[20 ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... 对AIAOT进行了深入研究.文献[20 ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... 本文提出了一种K分布海杂波环境下AI辅助的RMB滤波器(AI-RMB).首先,将K分布海杂波及Swerling I型起伏目标的幅度似然函数引入稳健多伯努利滤波器,提升对海探测环境下雷达的多目标跟踪性能;其次,与经典 AIAO方法[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 利用幅度信息计算理论检测概率和理论虚警概率不同,本文考虑到 RMB 滤波器的特点,采用贝塔分布迭代估计目标伯努利项的检测概率和杂波伯努利项的虚警概率;最后,为提升计算效率,采用积分表方法计算K分布杂波下的幅度似然函数.仿真实验表明,相较稳健多伯努利滤波器,本文所提方法在多目标状态估计、势估计以及杂波率估计方面性能更优,且运行时间没有显著增加. ...
... 在式(25)、式(26)、式(28)和式(29)中,目标和杂波的检测概率pD,u,k 虽然可以通过式(18)和式(19)求得理论值,但该值不能直接应用于AI-RMB的更新过程.其原因如下:一方面,与仅用于估计多目标状态的 MB 滤波器不同,RMB 滤波器不仅需要估计目标状态,还要在滤波的过程中估计出杂波率,由于通常情况下虚警概率比检测概率低得多(相差几个数量级),如果采用式(18)和式(19)计算出的理论检测概率,将会导致杂波伯努利项的权重过低,经过航迹修剪和合并,这些项很可能丢失,从而无法实现对杂波率的估计;另一方面,由式(18)计算出的理论检测概率并不能准确反映RMB中每个目标伯努利项的检测概率,这是因为只有在RMB滤波器中的目标伯努利项数与实际目标数完全一致的情况下才能准确表示目标伯努利项的检测概率,同样,由式(19)计算出的理论虚警概率也不能准确反映RMB 中每个杂波伯努利项的检测概率.基于上述两方面原因,本文在计算检测概率和虚警概率时,摒弃了常规AI OT [20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 中所采用的方法,而是采用贝塔分布来迭代估计每个伯努利项的检测概率和虚警概率. ...
Interacting multiple model tracking with target amplitude feature
6
1993
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
... 目前,AIAOT 领域已取得许多成果.Lerro等[20 ,21 ] 首先提出了 AIAOT 的基本理论,随后Ehrman等[22 ] 和Brekke等[23 ,24 ] 对AIAOT进行了深入研究.文献[20 ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... 本文提出了一种K分布海杂波环境下AI辅助的RMB滤波器(AI-RMB).首先,将K分布海杂波及Swerling I型起伏目标的幅度似然函数引入稳健多伯努利滤波器,提升对海探测环境下雷达的多目标跟踪性能;其次,与经典 AIAO方法[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 利用幅度信息计算理论检测概率和理论虚警概率不同,本文考虑到 RMB 滤波器的特点,采用贝塔分布迭代估计目标伯努利项的检测概率和杂波伯努利项的虚警概率;最后,为提升计算效率,采用积分表方法计算K分布杂波下的幅度似然函数.仿真实验表明,相较稳健多伯努利滤波器,本文所提方法在多目标状态估计、势估计以及杂波率估计方面性能更优,且运行时间没有显著增加. ...
... 假设目标的幅度d和运动状态相互独立,则目标的量测似然函数 g ( z | x ) c ( z ) [21 ] ...
... 在式(25)、式(26)、式(28)和式(29)中,目标和杂波的检测概率pD,u,k 虽然可以通过式(18)和式(19)求得理论值,但该值不能直接应用于AI-RMB的更新过程.其原因如下:一方面,与仅用于估计多目标状态的 MB 滤波器不同,RMB 滤波器不仅需要估计目标状态,还要在滤波的过程中估计出杂波率,由于通常情况下虚警概率比检测概率低得多(相差几个数量级),如果采用式(18)和式(19)计算出的理论检测概率,将会导致杂波伯努利项的权重过低,经过航迹修剪和合并,这些项很可能丢失,从而无法实现对杂波率的估计;另一方面,由式(18)计算出的理论检测概率并不能准确反映RMB中每个目标伯努利项的检测概率,这是因为只有在RMB滤波器中的目标伯努利项数与实际目标数完全一致的情况下才能准确表示目标伯努利项的检测概率,同样,由式(19)计算出的理论虚警概率也不能准确反映RMB 中每个杂波伯努利项的检测概率.基于上述两方面原因,本文在计算检测概率和虚警概率时,摒弃了常规AI OT [20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 中所采用的方法,而是采用贝塔分布来迭代估计每个伯努利项的检测概率和虚警概率. ...
Using target RCS when tracking multiple rayleigh targets
5
2010
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
... 目前,AIAOT 领域已取得许多成果.Lerro等[20 ,21 ] 首先提出了 AIAOT 的基本理论,随后Ehrman等[22 ] 和Brekke等[23 ,24 ] 对AIAOT进行了深入研究.文献[20 ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... 本文提出了一种K分布海杂波环境下AI辅助的RMB滤波器(AI-RMB).首先,将K分布海杂波及Swerling I型起伏目标的幅度似然函数引入稳健多伯努利滤波器,提升对海探测环境下雷达的多目标跟踪性能;其次,与经典 AIAO方法[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 利用幅度信息计算理论检测概率和理论虚警概率不同,本文考虑到 RMB 滤波器的特点,采用贝塔分布迭代估计目标伯努利项的检测概率和杂波伯努利项的虚警概率;最后,为提升计算效率,采用积分表方法计算K分布杂波下的幅度似然函数.仿真实验表明,相较稳健多伯努利滤波器,本文所提方法在多目标状态估计、势估计以及杂波率估计方面性能更优,且运行时间没有显著增加. ...
... 在式(25)、式(26)、式(28)和式(29)中,目标和杂波的检测概率pD,u,k 虽然可以通过式(18)和式(19)求得理论值,但该值不能直接应用于AI-RMB的更新过程.其原因如下:一方面,与仅用于估计多目标状态的 MB 滤波器不同,RMB 滤波器不仅需要估计目标状态,还要在滤波的过程中估计出杂波率,由于通常情况下虚警概率比检测概率低得多(相差几个数量级),如果采用式(18)和式(19)计算出的理论检测概率,将会导致杂波伯努利项的权重过低,经过航迹修剪和合并,这些项很可能丢失,从而无法实现对杂波率的估计;另一方面,由式(18)计算出的理论检测概率并不能准确反映RMB中每个目标伯努利项的检测概率,这是因为只有在RMB滤波器中的目标伯努利项数与实际目标数完全一致的情况下才能准确表示目标伯努利项的检测概率,同样,由式(19)计算出的理论虚警概率也不能准确反映RMB 中每个杂波伯努利项的检测概率.基于上述两方面原因,本文在计算检测概率和虚警概率时,摒弃了常规AI OT [20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 中所采用的方法,而是采用贝塔分布来迭代估计每个伯努利项的检测概率和虚警概率. ...
Tracking small targets in heavy-tailed clutter using amplitude information
8
2010
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
... 目前,AIAOT 领域已取得许多成果.Lerro等[20 ,21 ] 首先提出了 AIAOT 的基本理论,随后Ehrman等[22 ] 和Brekke等[23 ,24 ] 对AIAOT进行了深入研究.文献[20 ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... 在雷达对海探测中,运动目标的姿态和视角相对雷达经常变化,导致目标的雷达散射截面积(RCS,radar cross section)起伏不定,从而造成目标回波幅度起伏.目前,表征目标 RCS 起伏的模型包括Swerling 模型和 χ2 分布模型等,工程上常用SwerlingI~SwerlingIV 模型,其中,Swerling I型表示RCS在扫描内的脉冲间相关,而两次扫描相互独立,为慢起伏,其概率密度服从瑞利分布.大量海杂波实测数据分析表明,通常海杂波相关时间为毫秒级[30 ] ,服从慢起伏模型,且采用K分布模型能有效拟合较大入射余角范围内的海杂波幅度分布.目前,Swerling I型已广泛应用于描述海上目标RCS的起伏[23 ] . ...
... 本文提出了一种K分布海杂波环境下AI辅助的RMB滤波器(AI-RMB).首先,将K分布海杂波及Swerling I型起伏目标的幅度似然函数引入稳健多伯努利滤波器,提升对海探测环境下雷达的多目标跟踪性能;其次,与经典 AIAO方法[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 利用幅度信息计算理论检测概率和理论虚警概率不同,本文考虑到 RMB 滤波器的特点,采用贝塔分布迭代估计目标伯努利项的检测概率和杂波伯努利项的虚警概率;最后,为提升计算效率,采用积分表方法计算K分布杂波下的幅度似然函数.仿真实验表明,相较稳健多伯努利滤波器,本文所提方法在多目标状态估计、势估计以及杂波率估计方面性能更优,且运行时间没有显著增加. ...
... 在式(25)、式(26)、式(28)和式(29)中,目标和杂波的检测概率pD,u,k 虽然可以通过式(18)和式(19)求得理论值,但该值不能直接应用于AI-RMB的更新过程.其原因如下:一方面,与仅用于估计多目标状态的 MB 滤波器不同,RMB 滤波器不仅需要估计目标状态,还要在滤波的过程中估计出杂波率,由于通常情况下虚警概率比检测概率低得多(相差几个数量级),如果采用式(18)和式(19)计算出的理论检测概率,将会导致杂波伯努利项的权重过低,经过航迹修剪和合并,这些项很可能丢失,从而无法实现对杂波率的估计;另一方面,由式(18)计算出的理论检测概率并不能准确反映RMB中每个目标伯努利项的检测概率,这是因为只有在RMB滤波器中的目标伯努利项数与实际目标数完全一致的情况下才能准确表示目标伯努利项的检测概率,同样,由式(19)计算出的理论虚警概率也不能准确反映RMB 中每个杂波伯努利项的检测概率.基于上述两方面原因,本文在计算检测概率和虚警概率时,摒弃了常规AI OT [20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 中所采用的方法,而是采用贝塔分布来迭代估计每个伯努利项的检测概率和虚警概率. ...
... 通过K分布杂波的复合解释[23 ] ,可得Swerling I型起伏目标加杂波的PDF为 ...
... 式(36)中分子和分母的积分都没有闭合解.针对这一问题,Brekke等[23 ] 提出了一种采用网格的数值积分方法,以对g(η)的积分为例说明如下. ...
The modified riccati equation for amplitude-aided target tracking in heavy-tailed clutter
5
2011
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
... 目前,AIAOT 领域已取得许多成果.Lerro等[20 ,21 ] 首先提出了 AIAOT 的基本理论,随后Ehrman等[22 ] 和Brekke等[23 ,24 ] 对AIAOT进行了深入研究.文献[20 ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... 本文提出了一种K分布海杂波环境下AI辅助的RMB滤波器(AI-RMB).首先,将K分布海杂波及Swerling I型起伏目标的幅度似然函数引入稳健多伯努利滤波器,提升对海探测环境下雷达的多目标跟踪性能;其次,与经典 AIAO方法[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 利用幅度信息计算理论检测概率和理论虚警概率不同,本文考虑到 RMB 滤波器的特点,采用贝塔分布迭代估计目标伯努利项的检测概率和杂波伯努利项的虚警概率;最后,为提升计算效率,采用积分表方法计算K分布杂波下的幅度似然函数.仿真实验表明,相较稳健多伯努利滤波器,本文所提方法在多目标状态估计、势估计以及杂波率估计方面性能更优,且运行时间没有显著增加. ...
... 在式(25)、式(26)、式(28)和式(29)中,目标和杂波的检测概率pD,u,k 虽然可以通过式(18)和式(19)求得理论值,但该值不能直接应用于AI-RMB的更新过程.其原因如下:一方面,与仅用于估计多目标状态的 MB 滤波器不同,RMB 滤波器不仅需要估计目标状态,还要在滤波的过程中估计出杂波率,由于通常情况下虚警概率比检测概率低得多(相差几个数量级),如果采用式(18)和式(19)计算出的理论检测概率,将会导致杂波伯努利项的权重过低,经过航迹修剪和合并,这些项很可能丢失,从而无法实现对杂波率的估计;另一方面,由式(18)计算出的理论检测概率并不能准确反映RMB中每个目标伯努利项的检测概率,这是因为只有在RMB滤波器中的目标伯努利项数与实际目标数完全一致的情况下才能准确表示目标伯努利项的检测概率,同样,由式(19)计算出的理论虚警概率也不能准确反映RMB 中每个杂波伯努利项的检测概率.基于上述两方面原因,本文在计算检测概率和虚警概率时,摒弃了常规AI OT [20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 中所采用的方法,而是采用贝塔分布来迭代估计每个伯努利项的检测概率和虚警概率. ...
PHD Filtering with target amplitude feature
4
2008
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
... 目前,AIAOT 领域已取得许多成果.Lerro等[20 ,21 ] 首先提出了 AIAOT 的基本理论,随后Ehrman等[22 ] 和Brekke等[23 ,24 ] 对AIAOT进行了深入研究.文献[20 ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... 本文提出了一种K分布海杂波环境下AI辅助的RMB滤波器(AI-RMB).首先,将K分布海杂波及Swerling I型起伏目标的幅度似然函数引入稳健多伯努利滤波器,提升对海探测环境下雷达的多目标跟踪性能;其次,与经典 AIAO方法[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 利用幅度信息计算理论检测概率和理论虚警概率不同,本文考虑到 RMB 滤波器的特点,采用贝塔分布迭代估计目标伯努利项的检测概率和杂波伯努利项的虚警概率;最后,为提升计算效率,采用积分表方法计算K分布杂波下的幅度似然函数.仿真实验表明,相较稳健多伯努利滤波器,本文所提方法在多目标状态估计、势估计以及杂波率估计方面性能更优,且运行时间没有显著增加. ...
... 在式(25)、式(26)、式(28)和式(29)中,目标和杂波的检测概率pD,u,k 虽然可以通过式(18)和式(19)求得理论值,但该值不能直接应用于AI-RMB的更新过程.其原因如下:一方面,与仅用于估计多目标状态的 MB 滤波器不同,RMB 滤波器不仅需要估计目标状态,还要在滤波的过程中估计出杂波率,由于通常情况下虚警概率比检测概率低得多(相差几个数量级),如果采用式(18)和式(19)计算出的理论检测概率,将会导致杂波伯努利项的权重过低,经过航迹修剪和合并,这些项很可能丢失,从而无法实现对杂波率的估计;另一方面,由式(18)计算出的理论检测概率并不能准确反映RMB中每个目标伯努利项的检测概率,这是因为只有在RMB滤波器中的目标伯努利项数与实际目标数完全一致的情况下才能准确表示目标伯努利项的检测概率,同样,由式(19)计算出的理论虚警概率也不能准确反映RMB 中每个杂波伯努利项的检测概率.基于上述两方面原因,本文在计算检测概率和虚警概率时,摒弃了常规AI OT [20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 中所采用的方法,而是采用贝塔分布来迭代估计每个伯努利项的检测概率和虚警概率. ...
Bayesian multi- object filtering with amplitude feature likelihood for unknown object SNR
4
2010
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
... 目前,AIAOT 领域已取得许多成果.Lerro等[20 ,21 ] 首先提出了 AIAOT 的基本理论,随后Ehrman等[22 ] 和Brekke等[23 ,24 ] 对AIAOT进行了深入研究.文献[20 ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... 本文提出了一种K分布海杂波环境下AI辅助的RMB滤波器(AI-RMB).首先,将K分布海杂波及Swerling I型起伏目标的幅度似然函数引入稳健多伯努利滤波器,提升对海探测环境下雷达的多目标跟踪性能;其次,与经典 AIAO方法[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 利用幅度信息计算理论检测概率和理论虚警概率不同,本文考虑到 RMB 滤波器的特点,采用贝塔分布迭代估计目标伯努利项的检测概率和杂波伯努利项的虚警概率;最后,为提升计算效率,采用积分表方法计算K分布杂波下的幅度似然函数.仿真实验表明,相较稳健多伯努利滤波器,本文所提方法在多目标状态估计、势估计以及杂波率估计方面性能更优,且运行时间没有显著增加. ...
... 在式(25)、式(26)、式(28)和式(29)中,目标和杂波的检测概率pD,u,k 虽然可以通过式(18)和式(19)求得理论值,但该值不能直接应用于AI-RMB的更新过程.其原因如下:一方面,与仅用于估计多目标状态的 MB 滤波器不同,RMB 滤波器不仅需要估计目标状态,还要在滤波的过程中估计出杂波率,由于通常情况下虚警概率比检测概率低得多(相差几个数量级),如果采用式(18)和式(19)计算出的理论检测概率,将会导致杂波伯努利项的权重过低,经过航迹修剪和合并,这些项很可能丢失,从而无法实现对杂波率的估计;另一方面,由式(18)计算出的理论检测概率并不能准确反映RMB中每个目标伯努利项的检测概率,这是因为只有在RMB滤波器中的目标伯努利项数与实际目标数完全一致的情况下才能准确表示目标伯努利项的检测概率,同样,由式(19)计算出的理论虚警概率也不能准确反映RMB 中每个杂波伯努利项的检测概率.基于上述两方面原因,本文在计算检测概率和虚警概率时,摒弃了常规AI OT [20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 中所采用的方法,而是采用贝塔分布来迭代估计每个伯努利项的检测概率和虚警概率. ...
PHD filter with amplitude information in Weibull clutter
4
2013
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
... 目前,AIAOT 领域已取得许多成果.Lerro等[20 ,21 ] 首先提出了 AIAOT 的基本理论,随后Ehrman等[22 ] 和Brekke等[23 ,24 ] 对AIAOT进行了深入研究.文献[20 ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... 本文提出了一种K分布海杂波环境下AI辅助的RMB滤波器(AI-RMB).首先,将K分布海杂波及Swerling I型起伏目标的幅度似然函数引入稳健多伯努利滤波器,提升对海探测环境下雷达的多目标跟踪性能;其次,与经典 AIAO方法[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 利用幅度信息计算理论检测概率和理论虚警概率不同,本文考虑到 RMB 滤波器的特点,采用贝塔分布迭代估计目标伯努利项的检测概率和杂波伯努利项的虚警概率;最后,为提升计算效率,采用积分表方法计算K分布杂波下的幅度似然函数.仿真实验表明,相较稳健多伯努利滤波器,本文所提方法在多目标状态估计、势估计以及杂波率估计方面性能更优,且运行时间没有显著增加. ...
... 在式(25)、式(26)、式(28)和式(29)中,目标和杂波的检测概率pD,u,k 虽然可以通过式(18)和式(19)求得理论值,但该值不能直接应用于AI-RMB的更新过程.其原因如下:一方面,与仅用于估计多目标状态的 MB 滤波器不同,RMB 滤波器不仅需要估计目标状态,还要在滤波的过程中估计出杂波率,由于通常情况下虚警概率比检测概率低得多(相差几个数量级),如果采用式(18)和式(19)计算出的理论检测概率,将会导致杂波伯努利项的权重过低,经过航迹修剪和合并,这些项很可能丢失,从而无法实现对杂波率的估计;另一方面,由式(18)计算出的理论检测概率并不能准确反映RMB中每个目标伯努利项的检测概率,这是因为只有在RMB滤波器中的目标伯努利项数与实际目标数完全一致的情况下才能准确表示目标伯努利项的检测概率,同样,由式(19)计算出的理论虚警概率也不能准确反映RMB 中每个杂波伯努利项的检测概率.基于上述两方面原因,本文在计算检测概率和虚警概率时,摒弃了常规AI OT [20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 中所采用的方法,而是采用贝塔分布来迭代估计每个伯努利项的检测概率和虚警概率. ...
一种幅度信息辅助多伯努利滤波算法
4
2016
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
... 目前,AIAOT 领域已取得许多成果.Lerro等[20 ,21 ] 首先提出了 AIAOT 的基本理论,随后Ehrman等[22 ] 和Brekke等[23 ,24 ] 对AIAOT进行了深入研究.文献[20 ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... 本文提出了一种K分布海杂波环境下AI辅助的RMB滤波器(AI-RMB).首先,将K分布海杂波及Swerling I型起伏目标的幅度似然函数引入稳健多伯努利滤波器,提升对海探测环境下雷达的多目标跟踪性能;其次,与经典 AIAO方法[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 利用幅度信息计算理论检测概率和理论虚警概率不同,本文考虑到 RMB 滤波器的特点,采用贝塔分布迭代估计目标伯努利项的检测概率和杂波伯努利项的虚警概率;最后,为提升计算效率,采用积分表方法计算K分布杂波下的幅度似然函数.仿真实验表明,相较稳健多伯努利滤波器,本文所提方法在多目标状态估计、势估计以及杂波率估计方面性能更优,且运行时间没有显著增加. ...
... 在式(25)、式(26)、式(28)和式(29)中,目标和杂波的检测概率pD,u,k 虽然可以通过式(18)和式(19)求得理论值,但该值不能直接应用于AI-RMB的更新过程.其原因如下:一方面,与仅用于估计多目标状态的 MB 滤波器不同,RMB 滤波器不仅需要估计目标状态,还要在滤波的过程中估计出杂波率,由于通常情况下虚警概率比检测概率低得多(相差几个数量级),如果采用式(18)和式(19)计算出的理论检测概率,将会导致杂波伯努利项的权重过低,经过航迹修剪和合并,这些项很可能丢失,从而无法实现对杂波率的估计;另一方面,由式(18)计算出的理论检测概率并不能准确反映RMB中每个目标伯努利项的检测概率,这是因为只有在RMB滤波器中的目标伯努利项数与实际目标数完全一致的情况下才能准确表示目标伯努利项的检测概率,同样,由式(19)计算出的理论虚警概率也不能准确反映RMB 中每个杂波伯努利项的检测概率.基于上述两方面原因,本文在计算检测概率和虚警概率时,摒弃了常规AI OT [20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 中所采用的方法,而是采用贝塔分布来迭代估计每个伯努利项的检测概率和虚警概率. ...
一种幅度信息辅助多伯努利滤波算法
4
2016
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
... 目前,AIAOT 领域已取得许多成果.Lerro等[20 ,21 ] 首先提出了 AIAOT 的基本理论,随后Ehrman等[22 ] 和Brekke等[23 ,24 ] 对AIAOT进行了深入研究.文献[20 ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... 本文提出了一种K分布海杂波环境下AI辅助的RMB滤波器(AI-RMB).首先,将K分布海杂波及Swerling I型起伏目标的幅度似然函数引入稳健多伯努利滤波器,提升对海探测环境下雷达的多目标跟踪性能;其次,与经典 AIAO方法[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 利用幅度信息计算理论检测概率和理论虚警概率不同,本文考虑到 RMB 滤波器的特点,采用贝塔分布迭代估计目标伯努利项的检测概率和杂波伯努利项的虚警概率;最后,为提升计算效率,采用积分表方法计算K分布杂波下的幅度似然函数.仿真实验表明,相较稳健多伯努利滤波器,本文所提方法在多目标状态估计、势估计以及杂波率估计方面性能更优,且运行时间没有显著增加. ...
... 在式(25)、式(26)、式(28)和式(29)中,目标和杂波的检测概率pD,u,k 虽然可以通过式(18)和式(19)求得理论值,但该值不能直接应用于AI-RMB的更新过程.其原因如下:一方面,与仅用于估计多目标状态的 MB 滤波器不同,RMB 滤波器不仅需要估计目标状态,还要在滤波的过程中估计出杂波率,由于通常情况下虚警概率比检测概率低得多(相差几个数量级),如果采用式(18)和式(19)计算出的理论检测概率,将会导致杂波伯努利项的权重过低,经过航迹修剪和合并,这些项很可能丢失,从而无法实现对杂波率的估计;另一方面,由式(18)计算出的理论检测概率并不能准确反映RMB中每个目标伯努利项的检测概率,这是因为只有在RMB滤波器中的目标伯努利项数与实际目标数完全一致的情况下才能准确表示目标伯努利项的检测概率,同样,由式(19)计算出的理论虚警概率也不能准确反映RMB 中每个杂波伯努利项的检测概率.基于上述两方面原因,本文在计算检测概率和虚警概率时,摒弃了常规AI OT [20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 中所采用的方法,而是采用贝塔分布来迭代估计每个伯努利项的检测概率和虚警概率. ...
Multi-target tracking based on multi-Bernoulli filter with amplitude for unknown clutter rate
4
2015
... 利用幅度信息的目标跟踪方法主要包括检测前跟踪(TBD,track-before-detect)[18 ,19 ] 和幅度信息辅助目标跟踪(AIAOT,AI aided object tracking[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] .前者对连续多帧回波进行非相参积累以提取可能的目标航迹,对低信杂比目标(SCR,signal to clutter ratio)跟踪效果好,但由于每一帧都要对扫描区域进行遍历搜索,因此运算量很大;后者是在传统跟踪方法的基础上增加幅度似然的计算,能够显著提升算法的跟踪效果,并且运算量小. ...
... 目前,AIAOT 领域已取得许多成果.Lerro等[20 ,21 ] 首先提出了 AIAOT 的基本理论,随后Ehrman等[22 ] 和Brekke等[23 ,24 ] 对AIAOT进行了深入研究.文献[20 ,21 ,22 ,23 ,24 ]只针对单目标跟踪场景.对于多目标跟踪的情况,Clark等[25 ,26 ] 将Rayleigh杂波的幅度信息引入PHD滤波器,随后一些学者进行了更加深入的研究[27 ,28 ] .针对未知杂波强度的情况,Yuan[29 ] 将 Rayleigh 杂波和幅度恒定目标的AI引入RMB滤波器. ...
... 本文提出了一种K分布海杂波环境下AI辅助的RMB滤波器(AI-RMB).首先,将K分布海杂波及Swerling I型起伏目标的幅度似然函数引入稳健多伯努利滤波器,提升对海探测环境下雷达的多目标跟踪性能;其次,与经典 AIAO方法[20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 利用幅度信息计算理论检测概率和理论虚警概率不同,本文考虑到 RMB 滤波器的特点,采用贝塔分布迭代估计目标伯努利项的检测概率和杂波伯努利项的虚警概率;最后,为提升计算效率,采用积分表方法计算K分布杂波下的幅度似然函数.仿真实验表明,相较稳健多伯努利滤波器,本文所提方法在多目标状态估计、势估计以及杂波率估计方面性能更优,且运行时间没有显著增加. ...
... 在式(25)、式(26)、式(28)和式(29)中,目标和杂波的检测概率pD,u,k 虽然可以通过式(18)和式(19)求得理论值,但该值不能直接应用于AI-RMB的更新过程.其原因如下:一方面,与仅用于估计多目标状态的 MB 滤波器不同,RMB 滤波器不仅需要估计目标状态,还要在滤波的过程中估计出杂波率,由于通常情况下虚警概率比检测概率低得多(相差几个数量级),如果采用式(18)和式(19)计算出的理论检测概率,将会导致杂波伯努利项的权重过低,经过航迹修剪和合并,这些项很可能丢失,从而无法实现对杂波率的估计;另一方面,由式(18)计算出的理论检测概率并不能准确反映RMB中每个目标伯努利项的检测概率,这是因为只有在RMB滤波器中的目标伯努利项数与实际目标数完全一致的情况下才能准确表示目标伯努利项的检测概率,同样,由式(19)计算出的理论虚警概率也不能准确反映RMB 中每个杂波伯努利项的检测概率.基于上述两方面原因,本文在计算检测概率和虚警概率时,摒弃了常规AI OT [20 ,21 ,22 ,23 ,24 ,25 ,26 ,27 ,28 ,29 ] 中所采用的方法,而是采用贝塔分布来迭代估计每个伯努利项的检测概率和虚警概率. ...
大入射余角海杂波相关特性分析及幅度拟合
1
2018
... 在雷达对海探测中,运动目标的姿态和视角相对雷达经常变化,导致目标的雷达散射截面积(RCS,radar cross section)起伏不定,从而造成目标回波幅度起伏.目前,表征目标 RCS 起伏的模型包括Swerling 模型和 χ2 分布模型等,工程上常用SwerlingI~SwerlingIV 模型,其中,Swerling I型表示RCS在扫描内的脉冲间相关,而两次扫描相互独立,为慢起伏,其概率密度服从瑞利分布.大量海杂波实测数据分析表明,通常海杂波相关时间为毫秒级[30 ] ,服从慢起伏模型,且采用K分布模型能有效拟合较大入射余角范围内的海杂波幅度分布.目前,Swerling I型已广泛应用于描述海上目标RCS的起伏[23 ] . ...
大入射余角海杂波相关特性分析及幅度拟合
1
2018
... 在雷达对海探测中,运动目标的姿态和视角相对雷达经常变化,导致目标的雷达散射截面积(RCS,radar cross section)起伏不定,从而造成目标回波幅度起伏.目前,表征目标 RCS 起伏的模型包括Swerling 模型和 χ2 分布模型等,工程上常用SwerlingI~SwerlingIV 模型,其中,Swerling I型表示RCS在扫描内的脉冲间相关,而两次扫描相互独立,为慢起伏,其概率密度服从瑞利分布.大量海杂波实测数据分析表明,通常海杂波相关时间为毫秒级[30 ] ,服从慢起伏模型,且采用K分布模型能有效拟合较大入射余角范围内的海杂波幅度分布.目前,Swerling I型已广泛应用于描述海上目标RCS的起伏[23 ] . ...
A consistent metric for performance evaluation of multi object Filters
1
2008
... 本文通过计算每种算法的 OSPA 位置误差和OSPA势误差[31 ] 来评价算法的跟踪性能. ...









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}