


智能科学与技术学报 ›› 2019, Vol. 1 ›› Issue (2): 171-180.doi: 10.11959/j.issn.2096-6652.201926
辛峻峰1( ),张永波2,伯佳更1,赵博文1,范世缘1
),张永波2,伯佳更1,赵博文1,范世缘1
修回日期:2017-05-25
出版日期:2019-06-20
发布日期:2019-09-09
作者简介:辛峻峰(1982- ),男,山东青岛人,中国海洋大学博士生,主要研究方向为智能无人艇设计研究、港口航道及近海工程、船舶与海洋工程等。|张永波(1981- ),男,山东烟台人,中国海洋大学博士生,主要研究方向为海洋结构物水动力分析。|伯佳更(1995- ),男,主要研究方向为智能无人艇路线规划研究。|赵博文(1998- ),男,山东济南人,主要研究方向为船舶性能在CFD中的应用。|范世缘(1998- ),女,山东济南人,主要研究方向为机械设计、神经网络、认知神经科学等。
基金资助:
Junfeng XIN1(),Yongbo ZHANG2,Jiageng BO1,Bowen ZHAO1,Shiyuan FAN1
Revised:2017-05-25
Online:2019-06-20
Published:2019-09-09
Supported by:摘要:
遗传算法(GA)是无人艇路径规划系统中的一种有效方法,为了克服该算法易陷入局部最优早熟和收敛速度慢等缺陷,在不增加算法复杂度的前提下,基于数据驱动线性动态交叉策略提出了一种能够在最短时间内自适应动态调整控制参数的改进遗传算法(LCPGA)。与传统的遗传算法相比,LCPGA增加了种群多样性,能更有效地避免陷入局部最优,并提高了路径规划的精度、稳健性和收敛速度。仿真实验和无人艇现场试验验证了该算法具有更优良的性能,该算法可为无人艇路径规划提供一定的应用价值。
中图分类号:
辛峻峰, 张永波, 伯佳更, 等. 基于数据驱动的遗传算法的无人艇路径规划研究[J]. 智能科学与技术学报, 2019, 1(2): 171-180.
Junfeng XIN, Yongbo ZHANG, Jiageng BO, et al. Study on path planning of unmanned surface vessel based on data-driven genetic algorithm[J]. Chinese Journal of Intelligent Science and Technology, 2019, 1(2): 171-180.
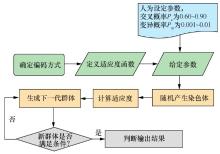
图1
传统遗传算法流程"
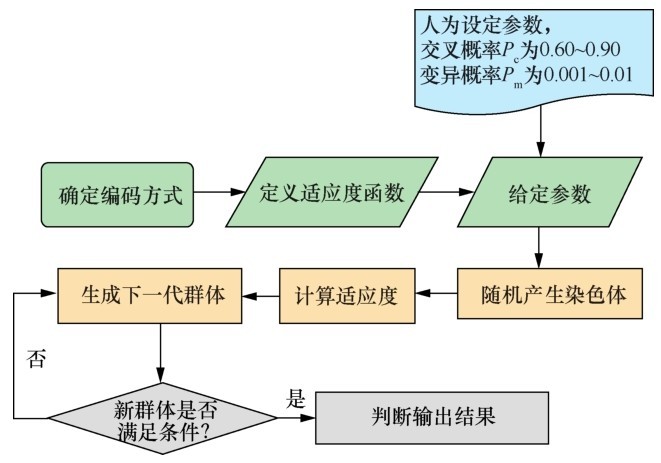

图2
改进的遗传算法流程"

表1
参数设置"
| 种群大小N | 交叉概率Pc | 变异概率Pm | 最大迭代次数(次) |
| 传统算法100 | 0.90 | 0.10 | 1000 |
| 改进算法100 | — | — | 1000 |

图4
平均值对比"
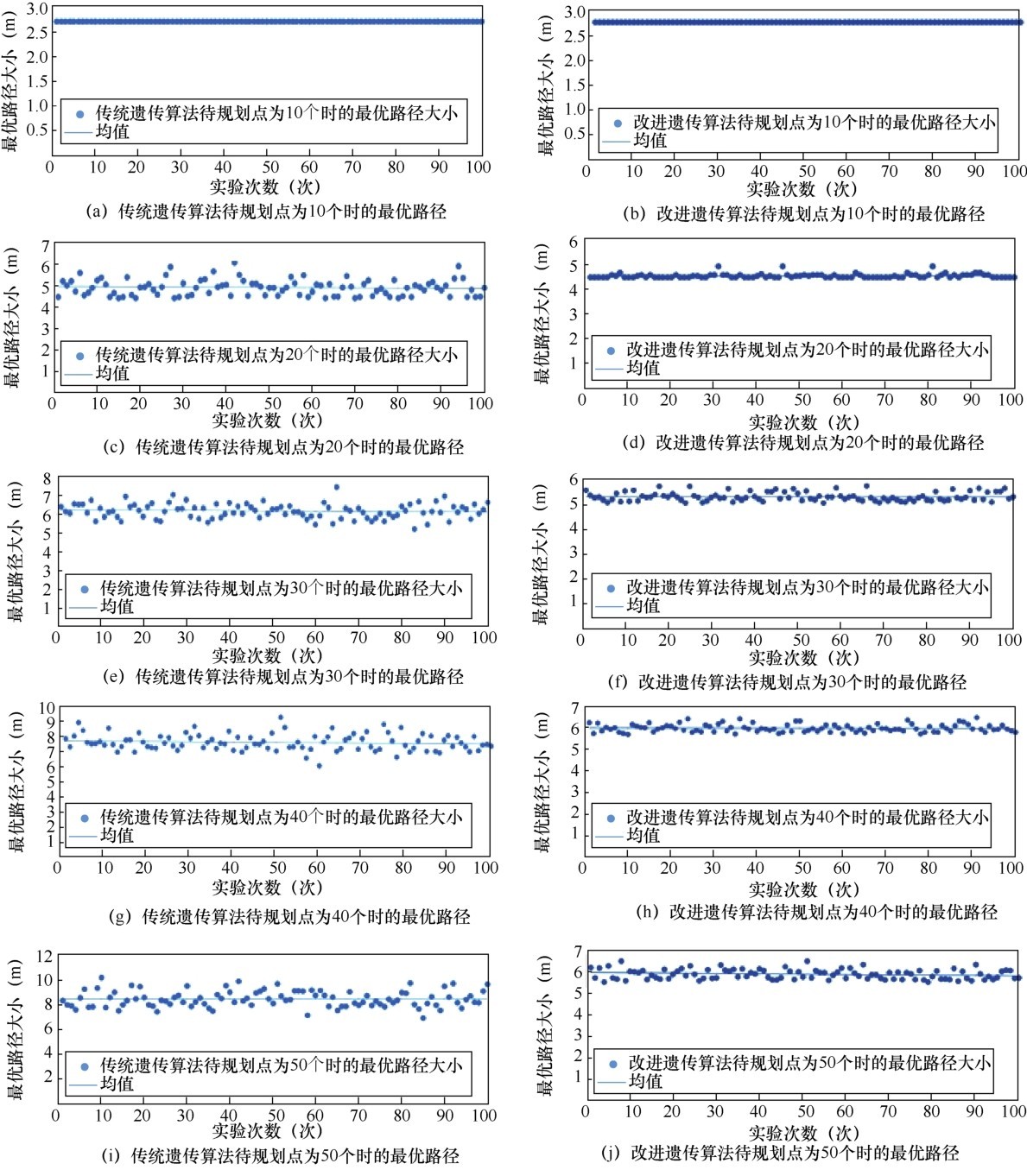
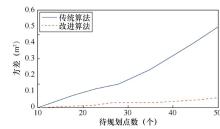
图5
方差对比"
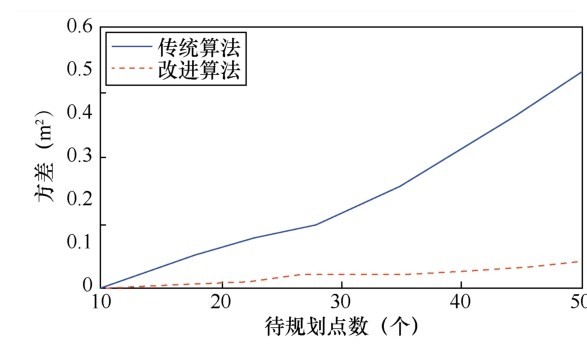
表2
结果对比"
| 点数(个) | 平均值(m) | 方差(m2) | ||||
| 传统算法 | 改进算法 | 相对误差 | 传统算法 | 改进算法 | 相对误差 | |
| 10 | 2.705 | 2.705 | 0.000 | 0.000% | 0.000 | 0.000% |
| 20 | 4.879 | 4.467 | -8.444 | 0.092% | 0.006 | -93.478% |
| 30 | 6.198 | 5.223 | -15.73 | 0.166% | 0.031 | -81.325% |
| 40 | 7.598 | 5.937 | -21.86 | 0.312% | 0.035 | -88.782% |
| 50 | 8.414 | 5.884 | -30.07 | 0.491% | 0.054 | -89.002% |
图6
计算时间对比"
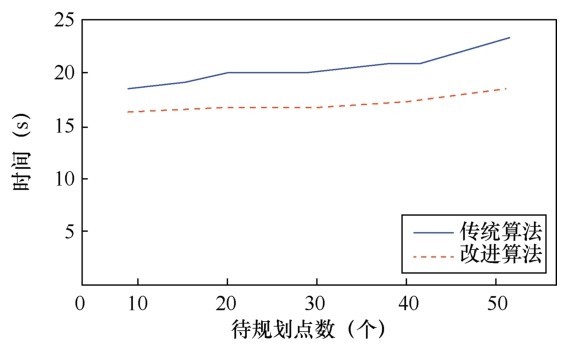
表3
消耗时间对比"
| 点数(个) | 传统算法(s) | 改进算法(s) | 相对误差 |
| 10 | 18.645 | 16.214 | -13.040% |
| 20 | 19.665 | 16.691 | -15.123% |
| 30 | 20.112 | 16.865 | -16.145% |
| 40 | 21.044 | 17.139 | -18.556% |
| 50 | 23.206 | 18.362 | -20.874% |
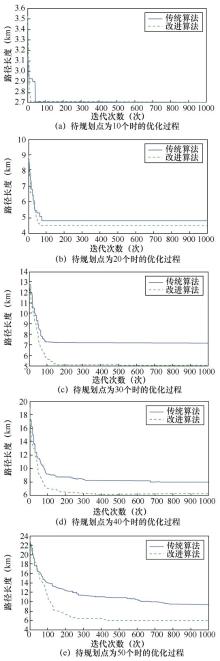
图7
传统算法和改进算法单次计算的优化过程"
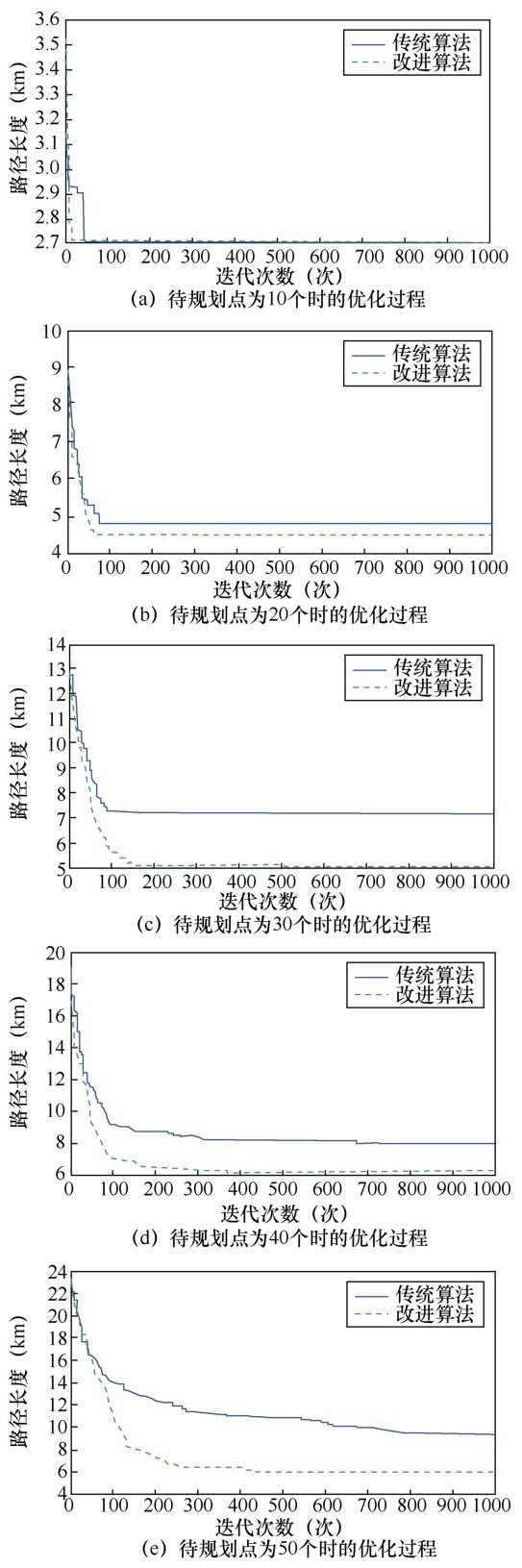
表4
最小迭代次数对比"
| 点数(个) | 传统算法(次) | 改进算法(次) | 相对误差 |
| 10 | 52 | 20 | -61.538% |
| 20 | 83 | 62 | -25.301% |
| 30 | 98 | 154 | 57.143% |
| 40 | 723 | 386 | -46.611% |
| 50 | 869 | 587 | -32.451% |

图8
实船样图"

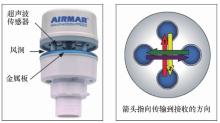
图9
传感器设备"
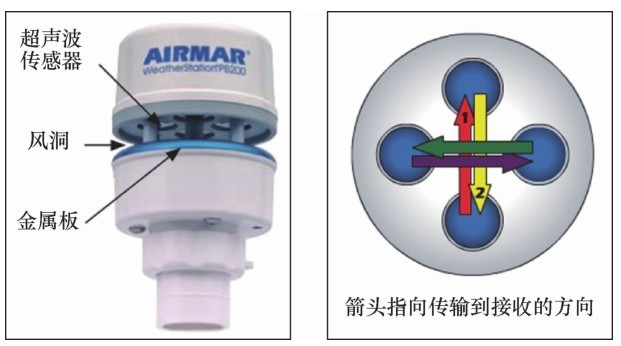
图10
下位机"
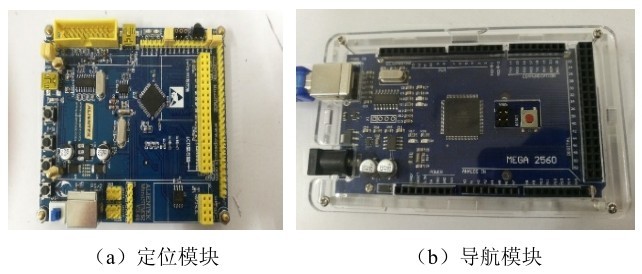

图11
超视距可视操作平台(上位机)"

表5
试验当天海况"
| 天气现象 | 风向 | 风力(级) | 浪高(m) | 能见度(km) |
| 多云 | 北风 | 3~4 | 1 | 12 |

图12
试验现场"

表6
待规划点坐标"
| 坐标序号 | 纬度 | 经度 |
| 1 | N36°03′ 22.38′′ | E120°22′ 57.06′′ |
| 2 | N36°03′ 21.94′′ | E120°23′ 11.96′′ |
| 3 | N36°03′ 9.95′′ | E120°23′ 6.15′′ |
| 4 | N36°03′ 38.43′′ | E120°22′ 55.51′′ |
| 5 | N36°03′ 11.26′′ | E120°22′ 56.27′′ |
| 6 | N36°03′ 9.76′′ | E120°23′ 5.38′′ |
| 7 | N36°03′ 20.26′′ | E120°22′ 58.45′′ |
| 8 | N36°03′ 2.14′′ | E120°23′ 17.12′′ |
| 9 | N36°03′ 6.57′′ | E120°23′ 24.70′′ |
| 10 | N36°03′ 8.45′′ | E120°23′ 10.63′′ |
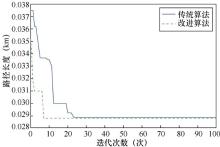
图13
传统算法和改进算法结果对比(待规划点为10个时)"
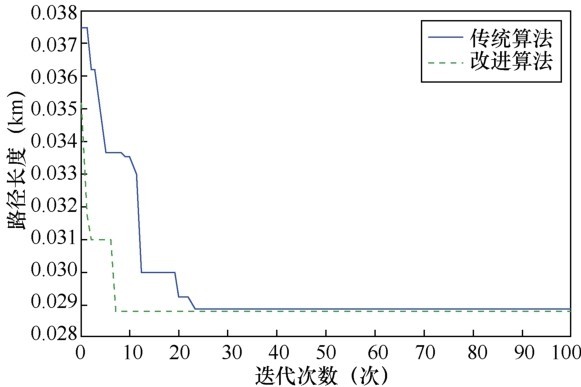
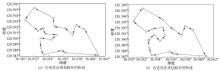
图14
传统算法和改进算法规划路径的轨迹(待规划点为10个时)"
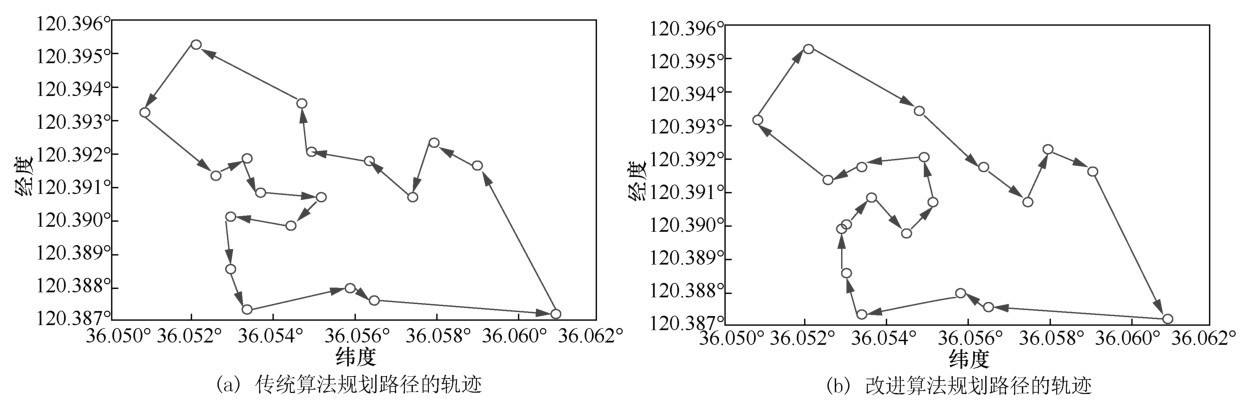
表7
消耗时间对比"
| 传统算法 | 改进算法 | 相对误差 | |
| 最优解距离(km) | 0.038 | 0.037 | -2.631% |
| 用时(s) | 5.666 | 4.807 | -15.160% |
表8
待规划点坐标"
| 坐标序号 | 纬度 | 经度 |
| 1 | N36°03′22.38″ | E120°22′57.06″ |
| 2 | N36°03′21.94″ | E120°23′11.96″ |
| 3 | N36°03′9.95″ | E120°23′06.15″ |
| 4 | N36°03′38.43″ | E120°22′55.51″ |
| 5 | N36°03′11.26″ | E120°22′56.27″ |
| 6 | N36°03′09.76″ | E120°23′05.38″ |
| 7 | N36°03′20.26″ | E120°22′58.45″ |
| 8 | N36°03′02.14″ | E120°23′17.12″ |
| 9 | N36°03′06.57″ | E120°23′24.70″ |
| 10 | N36°03′08.45″ | E120°23′10.63″ |
| 11 | N36°03′12.20″ | E120°23′08.70″ |
| 12 | N36°03′11.14″ | E120°23′12.10″ |
| 13 | N36°03′09.95″ | E120°23′00.67″ |
| 14 | N36°03′27.69″ | E120°23′13.90″ |
| 15 | N36°03′17.70″ | E120°23′08.02″ |
| 16 | N36°03′16.82″ | E120°23′13.03″ |
| 17 | N36°03′16.26″ | E120°23′18.20″ |
| 18 | N36°03′31.62″ | E120°23′11.66″ |
| 19 | N36°03′25.82″ | E120°23′08.26″ |
| 20 | N36°03′15.32″ | E120°23′04.92″ |
| 21 | N36°03′44.86″ | E120°23′54.46″ |
| 22 | N36°03′28.53″ | E120°23′47.99″ |
| 23 | N36°03′24.43″ | E120°23′59.50″ |
| 24 | N36°03′27.32″ | E120°23′54.61″ |
| 25 | N36°03′24.44″ | E120°23′59.50″ |
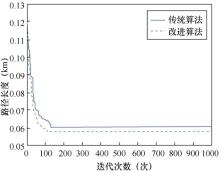
图15
传统算法和改进算法结果对比(待规划点为25个时)"
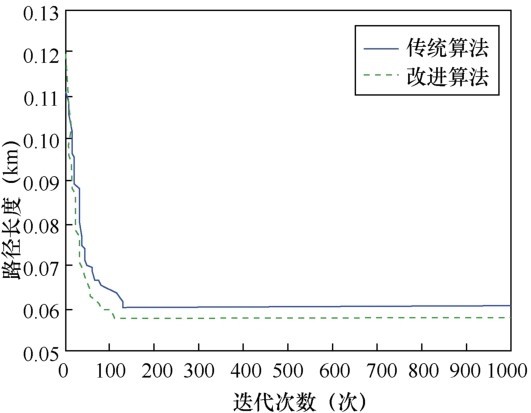

图16
传统算法和改进算法规划路径的轨迹(待规划点为25个时)"
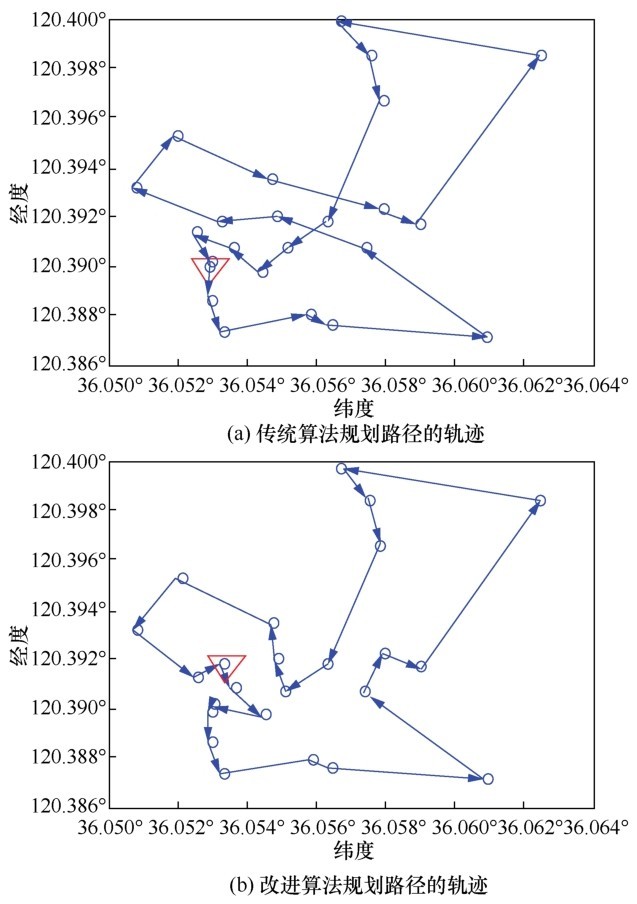
表9
消耗时间对比"
| 传统算法 | 改进算法 | 相对误差 | |
| 最优解距离(km) | 0.061 | 0.057 | -6.557% |
| 用时(s) | 18.961 | 16.538 | -12.779% |
表10
待规划点坐标"
| 坐标序号 | 纬度 | 经度 |
| 1 | N36°03′22.38″ | E120°22′57.06″ |
| 2 | N36°03′21.94″ | E120°23′11.96″ |
| 3 | N36°03′09.95″ | E120°23′06.15″ |
| 4 | N36°03′38.43″ | E120°22′55.51″ |
| 5 | N36°03′11.26″ | E120°22′56.27″ |
| 6 | N36°03′09.76″ | E120°23′05.38″ |
| 7 | N36°03′20.26″ | E120°22′58.45″ |
| 8 | N36°03′02.14″ | E120°23′17.12″ |
| 9 | N36°03′06.57″ | E120°23′24.70″ |
| 10 | N36°03′08.45″ | E120°23′10.63″ |
| 11 | N36°03′12.20″ | E120°23′08.70″ |
| 12 | N36°03′11.14″ | E120°23′12.10″ |
| 13 | N36°03′09.95″ | E120°23′00.67″ |
| 14 | N36°03′27.69″ | E120°23′13.90″ |
| 15 | N36°03′17.70″ | E120°23′08.02″ |
| 16 | N36°03′16.82″ | E120°23′13.03″ |
| 17 | N36°03′16.26″ | E120°23′18.20″ |
| 18 | N36°03′31.62″ | E120°23′11.66″ |
| 19 | N36°03′25.82″ | E120°23′08.26″ |
| 20 | N36°03′15.32″ | E120°23′04.92″ |
| 21 | N36°03′44.85" | E120°23′54.46" |
| 22 | N36°03′28.52" | E120°23′47.98" |
| 23 | N36°03′24.43" | E120°23′59.49" |
| 24 | N36°03′27.32" | E120°23′54.61" |
| 25 | N36°03′24.44" | E120°23′59.49" |
| 26 | N36°03′25.98" | E120°24′19.16" |
| 27 | N36°03′24.44" | E120°23′59.49" |
| 28 | N36°03′34.67" | E120°23′54.48" |
| 29 | N36°03′26.06" | E120°24′15.69" |
| 30 | N36°03′36.45" | E120°23′41.22" |
| 31 | N36°03′28.29" | E120°23′42.87" |
| 32 | N36°03′27.26" | E120°23′55.84" |
| 33 | N36°03′37.42" | E120°23′43.61" |
| 34 | N36°03′24.64" | E120°24′04.51" |
| 35 | N36°03′28.05" | E120°24′07.45" |
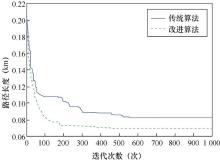
图17
传统算法和改进遗传算法结果(待规划点为35个时)"
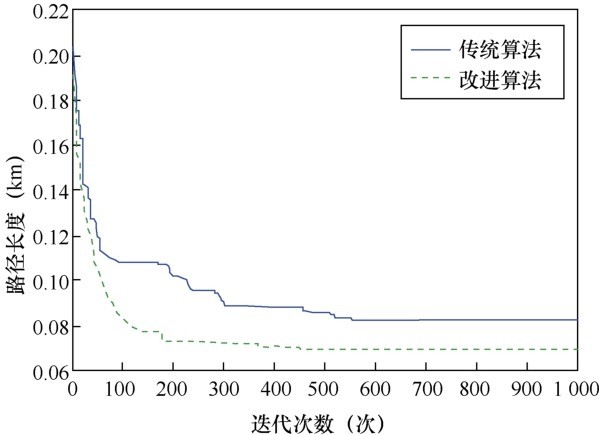

图18
传统算法和改进算法规划路径的轨迹(待规划点为35个时)"

表11
消耗时间对比"
| 传统算法 | 改进算法 | 相对误差 | |
| 最优解距离(km) | 0.083 | 0.069 | -16.867% |
| 用时(s) | 19.161 | 17.698 | -7.635% |
| [1] | GOLDBERG D E . Genetic algorithms in search,optimization and machine learning[M]. Addison-Wesley Pub.Co. 1989: 2104-2116. |
| [2] | SRINIVAS M , PATNAIK L M . Adaptive probabilities of crossover and mutation in genetic algorithms[J]. IEEE Transactions on Systems Man & Cybernetics, 2002,24(4): 656-667. |
| [3] | 郑南宁 . 人工智能新时代[J]. 智能科学与技术学报, 2019,1(1): 1-3. |
| ZHENG N N . The new era of artificial intelligence[J]. Chinese Journal of Intelligent Science and Technology, 2019,1(1): 1-3. | |
| [4] | 张钹 . 人工智能进入后深度学习时代.智能科学与技术学报[J]. 2019,1(1): 4-6. |
| ZHANG B . Artificial intelligence is entering the post deep-learning era[J]. Chinese Journal of Intelligent Science and Technology, 2019,1(1): 4-6. | |
| [5] | 郑亚君, 薛磊, 董璐 ,等. 基于 UWB 定位技术的多移动机器人编队控制.智能科学与技术学报[J]. 2019,1(1): 83-87. |
| ZHENG Y J , XUE L , DONG L ,et al. Formation control of mobile robots with UWB localization technology[J]. Chinese Journal of Intelligent Science and Technology, 2019,1(1): 83-87. | |
| [6] | CHANG W A , RAMAKRISHNA R S . A genetic algorithm for shortest path routing problem and the sizing of populations[M]. IEEE Press, 2002. |
| [7] | HAUPT R L , HAUPT S E . Practical Genetic Algorithms,Second Edition[M]. 2004. |
| [8] | TSAI C C , HUANG H C , CHAN C K . Parallel elite genetic algorithm and its application to global path planning for autonomous robot navigation[J]. IEEE Transactions on Industrial Electronics, 2011,58(10): 4813-4821. |
| [9] | TUNCER A , YILDIRIM M . Dynamic path planning of mobile robots with improved genetic algorithm[J]. Computers & Electrical Engineering, 2012,38(6): 1564-1572. |
| [10] | ELSHAMLI A , ABDULLAH H A , AREIBI S . Genetic algorithm for dynamic path planning[C]// Canadian Conference on Electrical and Computer Engineering. 2004: 677-680. |
| [11] | MANELY J E , . Unmanned surface vehicles,15 years of development[C]// Proc.Oceans 2008 MTS/IEEE Quebec Conference Exhibition. 2008: 1-4. |
| [12] | VEERS J , BERTRAN V . Development of the USV multi-mission surface vehicle III[C]// 5th Int.Computer and IT Application in the Maritime Industries. 2006: 345-355. |
| [13] | LU Y S . Research on the path planning algorithm for the surface of the surface[D]. Harbin:Harbin Engineering University, 2010. |
| [14] | RATNAWEERA A , HALGAMUGE S K , WATSON H C . Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficients[J]. IEEE Transactions on Evolutionary Computation, 2004,8(3): 240-255. |
| [15] | HOLLAND J H . Adaptation in natural and artificial systems[J]. Quarterly Review of Biology, 1975,6(2): 126-137. |
| [16] | LIANG J Y . Some common problems in the application of genetic algorithm[J]. Computer Application Research, 1999(7): 20-21. |
| [17] | HOLLAND J H . Outline for a logic theory of adaptive systems[J]. Journal of the Association for Computing Machinery, 1962,9(3): 297-314. |
| [18] | SAMADI M , OTHMAN M F . Global path planning for autonomous mobile robot using genetic algorithm[C]// International Conference on Signal-Image Technology & Internet-Based Systems. 2013: 726-730. |
| [19] | LEE J , KIM D W . An effective initialization method for genetic algorithm-based robot path planning using a directed acyclic graph[J]. Information Sciences, 2015:332. |
| [1] | 张佳欣, 张森林, 刘妹琴, 董山玲, 郑荣濠. 面向海洋环境自适应采样的多AUV协同定位[J]. 智能科学与技术学报, 2022, 4(4): 503-512. |
| [2] | 王云, 王美蕴, 周健, 邹媛媛, 李少远. 基于改进层次聚类和GL-APSO算法的配电网动态重构[J]. 智能科学与技术学报, 2022, 4(3): 410-417. |
| [3] | 郁洲, 毕敬, 苑海涛. 基于改进DQN算法的复杂海战场路径规划方法[J]. 智能科学与技术学报, 2022, 4(3): 418-425. |
| [4] | 王雨倩, 丁嵘. 基于群体智能成果的路径规划程序自动生成系统[J]. 智能科学与技术学报, 2022, 4(2): 255-263. |
| [5] | 董璐, 熊爱玲. 基于改进RRT*-Smart的复杂动态环境下的无人艇路径规划[J]. 智能科学与技术学报, 2022, 4(2): 264-276. |
| [6] | 廖泽华, 梁子钰, 周天民, 卢经纬, 魏庆来. 基于平行控制的离散非线性系统的事件触发近似最优控制[J]. 智能科学与技术学报, 2021, 3(4): 435-443. |
| [7] | 夏丽娜, 李擎, 宋睿卓, 王子涵, 许镇. 未知异构多智能体系统无模型自适应动态规划同步控制[J]. 智能科学与技术学报, 2021, 3(4): 444-448. |
| [8] | 王腾, 潘晶, 董璐, 孙长银. 面向防疫的智能导诊机器人关键技术及应用[J]. 智能科学与技术学报, 2021, 3(2): 187-194. |
| [9] | 高寒冰, 张驰, 靳明艳, 肖杨, 丛丰裕. 基于多源域自适应的跨被试情感脑电识别[J]. 智能科学与技术学报, 2021, 3(1): 59-64. |
| [10] | 杜宏庆,陈德旺,黄允浒,朱凤华,李灵犀. 基于改进遗传算法与支持度的模糊系统优化建模方法[J]. 智能科学与技术学报, 2020, 2(2): 179-185. |
| [11] | 乔欣,葛晨阳,邓鹏超,周艳辉,姚慧敏. ToF相机的有效深度数据提取与校正算法研究[J]. 智能科学与技术学报, 2020, 2(1): 72-79. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
|
||