


Chinese Journal of Intelligent Science and Technology ›› 2021, Vol. 3 ›› Issue (4): 482-491.doi: 10.11959/j.issn.2096-6652.202148
• Papers and Reports • Previous Articles Next Articles
Wei LI1,2, Menghan REN1,2, Weihao HUANG1,3, Xiaoyu DU1,2, Yi ZHOU1,3
Revised:2021-02-26
Online:2021-12-15
Published:2021-12-01
Supported by:CLC Number:
Wei LI, Menghan REN, Weihao HUANG, et al. Improved M-ORB based direct-loop closure detection algorithm for visual SLAM[J]. Chinese Journal of Intelligent Science and Technology, 2021, 3(4): 482-491.

"
"

"


"

"

"
"
"

"

"

"
"

"
| KITTI序列 | DSO | ORB-SLAM2 | D-SLAM |
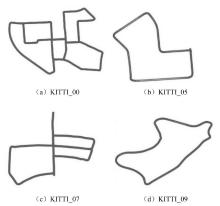
| KITTI_00 | 0.298 4% | 0.246 6% | 0.215 3% |
| KITTI_05 | 0.187 7% | 0.151 3% | 0.114 9% |
| KITTI_07 | 0.287 4% | 0.289 8% | 0.159 2% |
| KITTI_09 | 0.216 4% | 0.183 9% | 0.164 9% |
"
| KITTI序列 | DSO | ORB-SLAM2 | D-SLAM |
| KITTI_00 | 48.278 1 | 1.297 5 | 0.621 7 |
| KITTI_05 | 41.519 7 | 0.951 7 | 0.607 4 |
| KITTI_07 | 40.476 2 | 0.769 1 | 0.445 7 |
| KITTI_09 | 52.175 9 | 1.459 2 | 0.683 7 |
"
| KITTI序列 | DSO | ORB-SLAM2 | D-SLAM |
| KITTI_00 | 2.981 6 | 1.459 2 | 0.627 4 |
| KITTI_05 | 2.274 3 | 1.297 5 | 0.601 7 |
| KITTI_07 | 1.671 4 | 0.951 7 | 0.445 7 |
| KITTI_09 | 2.999 4 | 1.679 1 | 0.694 2 |

"
"

| [1] | 郑南宁 . 人工智能新时代[J]. 智能科学与技术学报, 2019,1(1): 1-3. |
| ZHENG N N . The new era of artificial intelligence[J]. Chinese Journal of Intelligent Science and Technology, 2019,1(1): 1-3. | |
| [2] | 刘强, 段富海, 桑勇 ,等. 复杂环境下视觉SLAM闭环检测方法综述[J]. 机器人, 2019,41(1): 112-123,136. |
| LIU Q , DUAN F H , SANG Y ,et al. A survey of loop-closure detection method of visual slam in complex environments[J]. Robot, 2019,41(1): 112-123,136. | |
| [3] | HESS W , KOHLER D , RAPP H H . Systems and methods of detecting loop closure in simultaneous localization and mapping (SLAM) applications:U.S.Patent Application,10318659B1[P]. 2019-6-11. |
| [4] | KLOKOV R , LEMPITSKY V . Escape from cells:deep Kd-networks for the recognition of 3D point cloud models[C]// Proceedings of 2017 IEEE International Conference on Computer Vision. Piscataway:IEEE Press, 2017: 863-872. |
| [5] | CHEN Z T , LAM O , JACOBSON A ,et al. Convolutional Neural Network-based Place Recognition[C]// Proceedings of the 16th Australasian Conference on Robotics and Automation.[S.l.:s.n.], 2018. |
| [6] | BAI D D , WANG C Q , ZHANG B ,et al. Sequence searching with CNN features for Robust and fast visual place recognition[J]. Computers and Graphics, 2018,70: 270-280. |
| [7] | GOMEZ-OJEDA R , LOPEZ-ANTEQUERA M , PETKOV N ,et al. Training a convolutional neural network for appearance-invariant place recognition[J]. Pattern Recognition Letters, 2015. |
| [8] | CHEN Z T , JACOBSON A , SUNDERHAUF N ,et al. Deep learning features at scale for visual place recognition[C]// Proceedings of 2017 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 2017: 3223-3230. |
| [9] | MERRILL N , HUANG G Q . Lightweight unsupervised deep loop closure[C]// Proceedings of Robotics:Science and Systems.[S.l.:s.n.], 2018. |
| [10] | SIVIC J , ZISSERMAN A . Video google:a text retrieval approach to object matching in videos[C]// Proceedings of the 9th IEEE International Conference on Computer Vision. Piscataway:IEEE Press, 2003. |
| [11] | CUMMINS M , NEWMAN P . Probabilistic appearance based navigation and loop closing[C]// Proceedings of 2007 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 2007: 2042-2048. |
| [12] | WILLIAMS B P , CUMMINS M , JOSé NEIRA ,et al. An image-to-map loop closing method for monocular slam[C]// Proceedings of 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2006: 2053-2059. |
| [13] | MATHIEU L , MICHAUD F . Memory management for real-time appearance-based loop closure detection[C]// Proceedings of 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2011: 1271-1276. |
| [14] | 李博, 杨丹, 邓林 . 移动机器人闭环检测的视觉字典树金字塔TF-IDF得分匹配方法[J]. 自动化学报, 2011,37(6): 665-673. |
| LI B , YANG D , DENG L . Visual vocabulary tree with pyramid TF-IDF scoring match scheme for loop closure detection[J]. Acta Automatica Sinica, 2011,37(6): 665-673. | |
| [15] | GAO X , WANG R , DEMMEL N ,et al. LDSO:direct sparse odometry with loop closure[C]// Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2018: 2198-2204. |
| [16] | RUBLEE E , RABAUD V , KONOLIGE K ,et al. ORB:an efficient alternative to SIFT or SURF[C]// Proceedings of the 13th IEEE International Conference on Computer Vision. Piscataway:IEEE Press, 2011: 2564-2571. |
| [17] | ENGEL J , USENKO V , CREMERS D . A photometrically calibrated benchmark for monocular visual odometry[J]. arXiv preprint,2016,arXiv:1607.02555. |
| [18] | GEIGER A , LENZ P , URTASUN R . Are we ready for autonomous driving? The KITTI vision benchmark suite[C]// Proceedings of IEEE Conference on Computer Vision and Pattern Recognition. Piscataway:IEEE Press, 2012: 3354-3361. |
| [19] | MUR-ARTAL R , TARDOS J D . ORB-SLAM2:an open-source SLAM system for monocular,stereo and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017,33(5): 1255-1262. |
| [20] | ENGEL J , SCH T , CREMERS D . LSD-SLAM:large-scale direct monocular SLAM[C]// Proceedings of European Conference on Computer Vision.[S.l.:s.n.], 2014: 834-849. |
| [21] | ENGEL J , KOLTUNV , CREMERSD . Direct sparse odometry[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018,40(3): 611-625. |
| [1] | Zijing ZHANG, Fei ZHANG. Cardinalized balanced multi-Bernoulli filter SLAM method based on pose graph optimization [J]. Chinese Journal of Intelligent Science and Technology, 2023, 5(1): 113-120. |
| [2] | Xiang CAO, Changyin SUN. UUV mission re-planning based on threat assessment of uncertain events [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 493-502. |
| [3] | Jiaxin ZHANG, Senlin ZHANG, Meiqin LIU, Shanling DONG, Ronghao ZHENG. Multi-AUV cooperative localization in adaptive sampling for marine environmental monitoring [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 503-512. |
| [4] | Yihang XU, Jian LIU, Changyin SUN. Quaternion-based single-vector feedback control for fully-actuated dish-shaped AUV [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 513-521. |
| [5] | Yinghao CAI, Hua YANG, Xuan AN, Wenshuo WANG, Yidong DU, Jiatao ZHANG, Zhigang WANG. Study on NeuroSymbolic learning and its applications [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 560-570. |
| [6] | Chao ZHAO, Jie XU, Xingyu CHEN, Kuizhi MEI, Xuguang LAN. A review of continual learning for robotics [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(3): 308-323. |
| [7] | Shaowei CUI, Shuo WANG, Jingyi HU, Chaofan ZHANG. A survey of visuotactile sensing technologies for robotic manipulation [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(2): 186-199. |
| [8] | De XU, Fangbo QIN. Research development on automated robotic peg-in-hole assembly [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(2): 200-211. |
| [9] | Yueguang GE, Shaolin ZHANG, Yinghao CAI, Tao LU, Dayong WEN, Haitao WANG, Shuo WANG. A survey on applications of ontology knowledge representation in robotics [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(2): 212-222. |
| [10] | Jingyi HU, Shaowei CUI, Chaofan ZHANG, Boyue ZHANG, Shuo WANG. 3D edge reconstruction method based on tactile sensing and servo [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(2): 233-245. |
| [11] | Lu DONG, Ailing XIONG. Path planning for unmanned surface vehicle in complex dynamic environment based on improved RRT*-Smart [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(2): 264-276. |
| [12] | Jifeng SHEN, Yue1 LIU, Hao WEI, Xin ZUO, Wankou YANG. Anchor free multispectral pedestrian detection algorithm based on differential feature attention mechanism [J]. Chinese Journal of Intelligent Science and Technology, 2021, 3(3): 294-303. |
| [13] | Teng WANG, Jing PAN, Lu DONG, Changyin SUN. Key technologies and applications of intelligent guiding robots for epidemic prevention [J]. Chinese Journal of Intelligent Science and Technology, 2021, 3(2): 187-194. |
| [14] | Xiaoyan DENG, Zhuliang YU, Canguang LIN, Zhenghui GU, Yuanqing LI. Research on human-computer shared control technology based on brain-computer interface [J]. Chinese Journal of Intelligent Science and Technology, 2021, 3(1): 85-92. |
| [15] | Rizhong WANG, Huiping LI, Di CUI, Demin XU. Depth control of autonomous underwater vehicle using deep reinforcement learning [J]. Chinese Journal of Intelligent Science and Technology, 2020, 2(4): 354-360. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
|
||