基于积分反步法的四旋翼飞行器控制设计
郭妍( ),吴美平,唐康华,王雪莹
),吴美平,唐康华,王雪莹
),吴美平,唐康华,王雪莹
Integral back-stepping algorithm for designing the quadrotor aircraft controller
Yan GUO(),Meiping WU,Kanghua TANG,Xueying WANG
),Meiping WU,Kanghua TANG,Xueying WANG
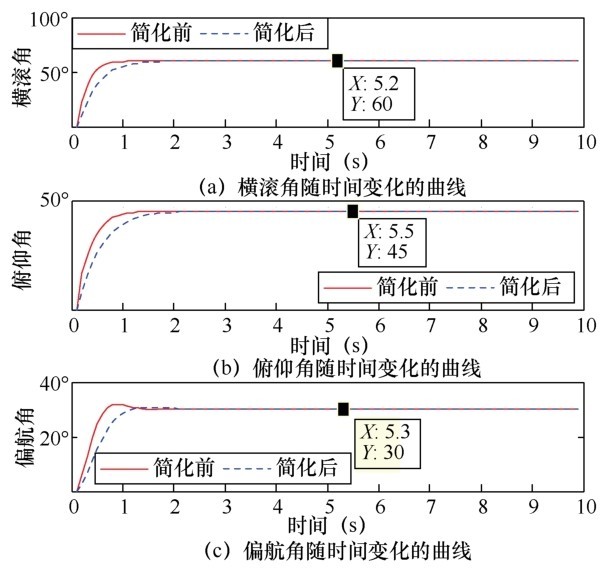
图2. 控制模型简化前、后飞行器各姿态角随时间变化的曲线
.