





1 引言
对平行智能及其支撑平行系统的原始思考源自20世纪80年代初,计算力学中从材料疲劳断裂实验的蒙特卡洛计算机模拟到计算实验的设想[1],后曾根据美国国家航天局(National Aeronautics and Space Administration,NASA)空间站和月球/火星无人系统及其无人工厂的任务要求和实践,于20世纪90年代初被称为“影子系统(shadow systems)”[2]。21世纪初,针对复杂系统的管理与控制,上述系统正式被命名为“平行系统”[3],该系统的核心是基于ACP方法,利用人工系统进行计算实验、生产数据、提炼智能;通过虚实互动、平行驱动和平行执行,构造虚实空间之间的双反馈和大闭环,完成“小数据、大数据、深智能”的智能系统“三步曲”。
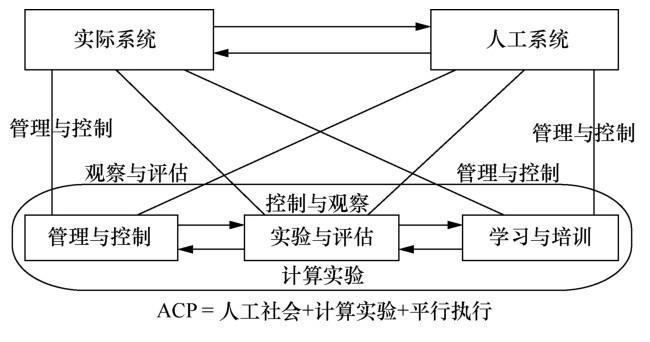
平行系统的基本框架如图1所示,平行系统包括主要为物理形态的实际系统和软件形态的人工系统,并以学习与培训、实验与评估、管理与控制3种基础模式运行。其中实际系统与人工系统的对应关系可以是一对一、一对多、多对一及多对多。与传统并行计算的“分而治之”不同,平行计算的理念是“扩而治之”,利用虚实互动的过程提出复杂问题的解决方案。某些意义下,平行的理念就是智能的“虚数”,引入平行可使智能从简单空间进入复杂空间,进一步使其从简单智能走向复杂智能,从而克服单凭人类智能难以克服的“认知鸿沟”或“建模鸿沟”的基本问题[4]。为此,笔者还引入社会物理信息系统(cyber-physical-social systems, CPSS)(或CSP(cyber- social-physical))的概念[5,6],来明确人及社会因素等“软科学”知识在平行系统中的核心作用,针对社会复杂性和工程复杂性同时呈现的情况,构建知识自动化的基础设施,实现面向工程的新AI,即智能自动化(automation of intelligence)和相应的智能组织及智慧社会。
图1
社会计算、计算社会系统、平行管理与平行控制、平行交通、平行社会及经济系统等是比较早应用平行理论进行研究的领域[7,8,9,10,11,12,13,14,15]。图2给出了平行控制的基本框架[9],图3按系统的复杂性的程度给出平行控制与其他控制方法的不同与联系[16]。一般而言,当相对复杂性高但精确度低时,人们只能利用人工系统进行平行控制;当相对复杂性、精确度为中等时,可以采用软件定义的过程落实平行控制;当相对复杂性低而精确度高时,能够借助精准模型和数字孪生实施平行控制,并大量引用传统控制的方法和经验。参考文献[17-18]详细说明了数字孪生与平行系统的关系,本文将针对复杂性低、精确度高的情况讨论平行控制的具体方法,探索由平行控制方法将人工智能与智能控制深入融合的途径。
图2

图3

2 控制回顾:智能控制与平行控制
关于控制的原始思想与实践可以被追溯到人类发展历史的初期,因为利用自然工具和人类认知改变环境来达到目的是人之天性。从科技文献角度来说,业界公认的控制理论文献始于著名的物理学家麦克斯韦(Maxwell J C)[19]的论文“On govemors”,发于著名的数学家罗斯(Routh E J)和数学家赫尔维茨(Adolf Hurwitz)分别于1874年与1895年独立提出的控制稳定性判据(事实上,数学家Charles Sturm较早建立了相关的定理),起于20世纪20年代的PID控制,从此走上了从基于传递函数的框图表示方法到基于微分方程的状态分析方法的发展道路,以物理自动化或工业自动化为核心任务,并一直发展到今天[20,21],这就是经典控制理论的简要发展历程。
图灵(Turing A)引入图灵机之后,引发了对利用自动机(automata)进行拟人思维的智能控制的研究,如早期关于有限状态自动机(finite state machines)、智能自动机(intelligent automata)和移动自动机(mobile automata)的工作[22,23]。美国华人学者傅京孙(Fu K S)是较早以科技文献形式提出“智能控制”的研究者[24]。后来其同事Saridis G N[25]在人工智能和控制系统之外,将信息论、分层递阶、运筹决策和系统工程等方法引入智能控制,使之成为一个独立的研究与应用领域。今天,从模糊逻辑、遗传演化到蚁群生物等各种智能控制算法层出不穷,并针对工业自动化和信息自动化形成一个崭新的控制及自动化分支[22,23]。
3 经典控制的重铸:由孪生到智能
假如人们有被控系统的高精度模型,即数字孪生,在经典控制中,其控制方法如下:
状态方程:
控制方程:
其中,
一般而言,式(1)和式(2)是由物理或逻辑建模而来的,反映了相应的物理定律或逻辑关系。关键的是,控制函数不可对时间求导,一个原因是物理规则不允许,另一个原因是系统实现不允许,因为这将导致噪声被放大和硬件变复杂等一系列的复杂工程问题。
平行控制的控制方法如下:
状态方程:
控制方程:
即将控制方程的左端改为控制向量对时间的导数。其中状态函数和控制函数与式(1)和式(2)的相应函数可以不完全一致。式(3)和式(4)的形式早在2005年关于平行控制的学术讨论中出现,但讨论者皆认为对控制向量求导既无物理意义,又无分析上的明显作用,因此没有进行进一步的研究工作。
图4
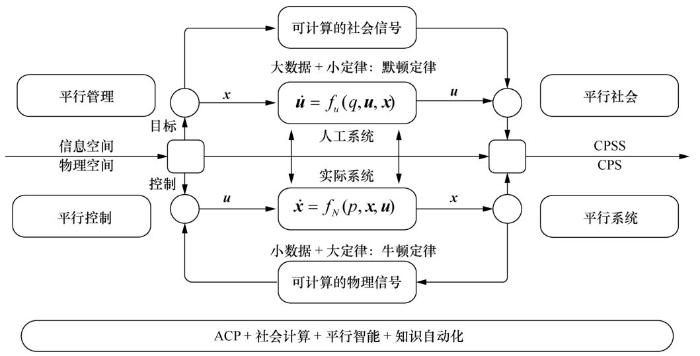
图5
图6
平行控制式(3)和式(4)的意义如下。
• 使控制系统与被控系统在形式上对称,它们不再是一个代数方程、一个微分方程,而是两个对等的微分方程,从而使二者从形式到内容在数学上完全一致。这是实现拟人控制和傅京孙的以机器人实现智能控制设想的基础。
• 控制器不再是根据状态即时地决定控制量,而是根据状态决定控制的变化量,进而决定控制量本身。这为控制回溯历史、预测未来提供了数学基础,扩展了决定控制的信息空间。同时,这为以新的方式引入控制与被控角色的博弈对抗打下了基础,机器学习、人工智能等方法也更加有效地融入控制理论。
• 经典控制的式(1)和式(2)可被视为平行控制的特殊情况,对式(2)进行时间求导,并利用式(1),可以得到:
因此,经典控制可被视为控制的变化率与状态的变化率成比例的一种特殊的平行控制。经典控制的各种问题及相应的研究结果,都可以在平行控制的新视角下重新进行分析。
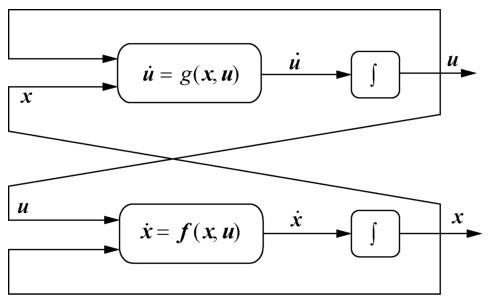
• 平行控制的式(3)和式(4)可被重新写成一个方程:
• 平行控制为“边缘简单,云端复杂”的云控制提供了一条新的途径。简言之,式(3)和式(4)可以在云端实施,式(1)和式(2)可以在边缘设备上实现,而且式(1)和式(3)可以不完全一致,式(1)一般应为式(3)的简洁式或简化版,而式(4)的控制向量
总之,在有数字孪生模型的情况下,通过引入控制向量的时间导数,平行控制能够使被控系统与控制引导在数学上对称,并能够更方便地引入对抗博弈、机器学习、人工智能等方法,构造一个由孪生而智能的新途径。
4 理论与应用案例
其中,
并设其特征的方程为:
线性平行控制极点配置:可控情况。算法如下[29]。
算法1 系统可控时的平行控制器设计算法。
初始化:
给定系统矩阵
执行:
1:若m=1,则
① 寻找
② 定义矩阵
③ 进行非奇异变换,令
取
2:若m > 1,则
① 寻找
② 寻找
③ 定义向量
④ 变换矩阵
⑤ 重复步骤①至④m-2次,获得矩阵
⑥ 对于矩阵
⑦ 给出矩阵
3:返回:
线性平行控制极点配置:不可控情况。算法如下[29]。
算法2 系统不完全可控时的平行控制器设计算法。
初始化:
给定矩阵
执行:
1:进行非奇异变换。
2:若期望特征多项式不能被
3:定义新系统、平行控制器、闭环系统和特征多项式,对于新系统,
4:若
① 寻找
② 定义矩阵
③ 进行非奇异变换,令
定 义
5:若
① 寻找
② 寻找
③ 定义向量
④ 变换矩阵
⑤ 重复步骤①至④
⑥ 对于矩阵
⑦ 给出矩阵
6:令
7:返回:
8:返回:“不存在平行控制器”。
举例如下。
例1:可控线性系统。
其中,
如果希望的极点为[-1 -1 -2 -2 -3 -3],算法1对应的
即平行控制为:
图7

图8

例2:不可控线性系统。
其中,
其不可控极点为-1,如果希望的极点为[-1-1 -2 -2],则算法2对应的
图9

图10

5 平行传感:由被动到主动
式(1)~(4)仅考虑了全部状态向量直接可观的情况。许多时候,人们必须处理一些状态不能被直接测度的问题。此时,人们必须考虑输出的传感器方程,而式(1)和式(2)相应地变成如下形式。
(1)经典控制
状态方程:
传感器方程:
控制方程:
(2)平行控制
状态方程:
传感器方程:
控制方程:
其中,
6 结束语
图6给出了基于数字孪生平行控制的最简化的形式,而平行控制的式(3)和式(4)表面上仅在经典控制的式(1)和式(2)上加了控制向量对时间求导的一个小点,但为控制方法的新发展开拓了一个与传统控制方法十分不同的方向,特别适用于目前边际执行与云端计算的控制架构。因此,平行控制有广泛的研究和应用前景,本文所述的结果只是一些初步的总结。
平行控制的方法与云计算、边缘设备、工业互联网、智联网、数字孪生等技术密切相关,可成为推动这些智能新技术发展与应用的一条新路径,值得进一步深入研究与普及。
参考文献
用计算机模拟疲劳实验的设想
[R].
A proposal for computational fatigue experiments based on computer simulation
[R].
Shadow systems:a new concept for nested and embedded co-simulation for intelligent systems
[R].
平行系统方法与复杂系统的管理和控制
[J].
Parallel system methods for management and control of complex systems
[J].
复杂智能与Lighthill报告的再分析:关于平行智能与智能虚数的讨论
[R].
Complex intelligence and revaluation of Lighthill report:an investigation of parallel intelligence and imaginary number for intelligence
[R].
社会计算与情报和安全信息学原型系统的研发
[R].
Research and development of social computing and prototype systems of intelligence and security informatics
[R].
The emergence of intelligent enterprises:from CPS to CPSS
[J].
从一无所有到万象所归:人工社会与复杂系统研究
[N].
Research and development of social computing and prototype systems of intelligence and security informatics
[R].
On the philosophical and sociological foundations of computational methods for social complex systems
[J].
关于复杂系统的建模、分析、控制和管理
[J].
On the modeling,analysis,control and management of complex systems
[J].
未来的管理
[J].
Future management
[J].
Parallel control and management for intelligent transportation systems:concepts,architectures,and applications
[J].
从零星工程到微博技术:迈向计算社会
[J].
From piecemeal engineering to twitter technology:towards a computational society
[J].
人工社会、计算实验、平行系统--关于复杂社会经济系统计算研究的讨论
[J].
Artificial societies,computational experiments,and parallel systems:a discussion on computational theory of complex social-economic systems
[J].
Artificial societies,computational experiments,and parallel systems:an investigation on a computational theory for complex socioeconomic systems
[J].
Parallel economics:a new supply-demand philosophy via parallel organizations and parallel management
[J].
平行控制:数据驱动的计算控制方法
[J].
Parallel control:a method for data-driven and computational control
[J].
数字孪生与平行系统:发展现状、对比及展望
[J].
Digital twins and parallel systems:state of the art,comparisons and prospect
[J].
如何从数字孪生到平行智能:关于数字孪生与平行系统
[R].
How to go from digital twin to parallel intelligence:on digital twin and parallel system
[R].
On govemors
[J].
A history of control engineering 1930-1955
[J].
Control theory:history,mathematical achievements and perspectives
[J].
智能控制:从学习控制到平行控制
[J].
Intelligent control:from learning control to parallel control
[J].
智能控制方法与应用
[M].
Intelligent control method and application
[M].
Learning control systems and intelligent control systems:an intersection of artificial intelligence and automatic control
[J].
Toward the realization of intelligent controls
[J].
Where does AlphaGo go:from Church-Turing thesis to AlphaGo thesis and beyond
[J].
最佳格点集在最小二乘法中的应用
[J].
Application of good lattice points set in least square method
[J].
最小二乘加权残值方法的速进算法
[C]//
Sequential algorithms for least square weighted residual methods
[C]//
Parallel control for continuous-time linear systems:a case study
[J].
A novel parallel control method for discrete-time linear systems
[J].
A novel parallel control method for continuous-time linear output regulation with disturbances
[J].
Back-stepping-based parallel control for a class of cascaded nonlinear systems
[J].
Parallel control for optimal tracking via adaptive dynamic programming
[J].
平行传感与平行感知:平行传感器的原理、框架与设计
[R].
Parallel sensing and parallel cognition:the design prin-ciple and framework of parallel sensors
[R].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}