基于深度强化学习算法的自主式水下航行器深度控制
Depth control of autonomous underwater vehicle using deep reinforcement learning
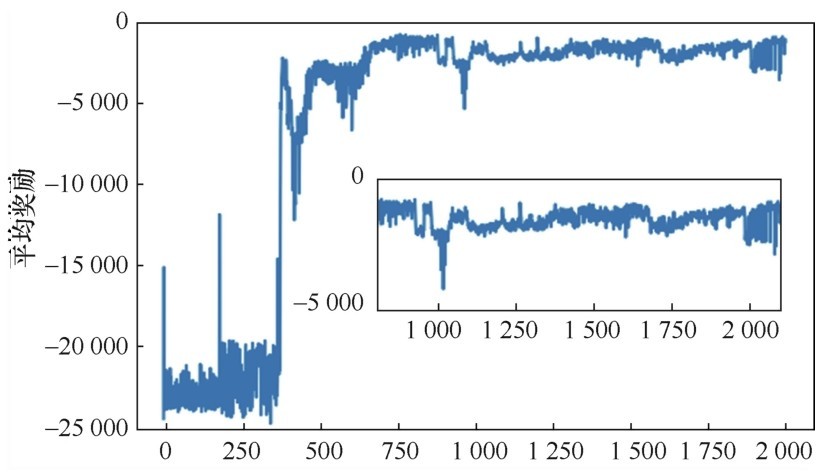
图6. 平均奖励值随训练幕数的变化
.
|
基于深度强化学习算法的自主式水下航行器深度控制
|
|
Depth control of autonomous underwater vehicle using deep reinforcement learning
|
|
图6. 平均奖励值随训练幕数的变化 |
. |
| |