移动对象轨迹数据的位置预测
1
2019
... 移动目标轨迹预测是一个典型的涉及交通运输工程和智能科学与技术的多学科交叉研究问题,在智能交通监管、异常行为检测和无人航行器自主导航等领域具有重要的理论研究和实际应用价值[1 ] .移动目标轨迹预测通过挖掘移动目标的历史位置信息和行为习惯,计算目标未来的位置信息和行为动态.根据移动目标轨迹在不同应用领域的表现形式(主要包括公路、航空、轨道、航运等),可将移动目标分为二维移动目标(如汽车、行人和船舶等)和三维移动目标(如飞行器).本文主要从数据驱动和行为驱动两个方面综述移动目标轨迹预测方法的发展现状,移动目标轨迹预测方法的分类见表1 . ...
移动对象轨迹数据的位置预测
1
2019
... 移动目标轨迹预测是一个典型的涉及交通运输工程和智能科学与技术的多学科交叉研究问题,在智能交通监管、异常行为检测和无人航行器自主导航等领域具有重要的理论研究和实际应用价值[1 ] .移动目标轨迹预测通过挖掘移动目标的历史位置信息和行为习惯,计算目标未来的位置信息和行为动态.根据移动目标轨迹在不同应用领域的表现形式(主要包括公路、航空、轨道、航运等),可将移动目标分为二维移动目标(如汽车、行人和船舶等)和三维移动目标(如飞行器).本文主要从数据驱动和行为驱动两个方面综述移动目标轨迹预测方法的发展现状,移动目标轨迹预测方法的分类见表1 . ...
异常轨迹数据预警与预测关键技术综述
2
2017
... 全球定位系统、视频监控系统、手持移动设备和射频识别等设备的普遍应用,产生了大量运动轨迹数据[2 ] ,这为基于数据驱动的移动目标轨迹预测方法提供了数据支撑.利用海量的移动目标轨迹数据进行分析,建立合理轨迹预测模型,可实现对移动目标轨迹的准确预测,对完善智能交通系统、促进交通安全快速发展具有重要的研究意义.传统预测方法难以从复杂的历史轨迹数据中学习到轨迹结构特征和移动目标行为特征.得益于人工智能等技术的飞速发展,基于深度学习的方法被用于移动目标的轨迹预测,该技术可有效学习目标的历史行为特征,为移动目标轨迹预测研究带来了新的方向,但也存在可解释性低、实时性差等问题[3 ] .近年来,随着智能交通系统的发展,移动目标行为特征被广泛研究.基于行为驱动的移动目标轨迹预测方法可通过建立动力学模型来反映移动目标的物理运动规律,从而实现短期内的轨迹高精度预测.为了准确描述移动目标之间的相互影响,在模型中引入注意力机制可增强运动特征的显著性,去除冗余信息的干扰.同时,对目标的行为意图进行估计,然后对其轨迹进行意图识别的过程也可以用于移动目标的轨迹预测.针对不同移动目标,轨迹预测方法在物理建模和应用场景等方面存在较大差异.地面移动目标的轨迹预测可基于行为驱动建立动力学模型或对意图进行识别,但动力学模型缺乏可解释性,意图识别受限于简单场景[4 ] .海上移动目标运动空间自由、环境复杂多变、航行特征较多,基于行为驱动的移动目标轨迹预测方法常常存在难以高精度刻画目标轨迹的不足. ...
... 基于轨迹分析的目标异常行为识别一般通过大量历史轨迹数据学习移动目标的行为特征,建立正常模式下的轨迹路线和行为模式,通过轨迹预测分析预测位置和真实位置,对隐藏在正常行为模式中的异常行为进行识别[71 ,72 ,73 ] .传统轨迹预测方法结合轨迹相似度描述、轨迹聚类算法可实现对异常行为轨迹的高效提取[2 ] ,基于DBSCAN聚类算法挖掘船舶历史轨迹图谱,并将其作为判定异常行为的标准,然后利用卡尔曼滤波对船舶航行轨迹进行预测,检测异常行为并在电子海图中实时预警,实现海上异常船舶智能监管[74 ] .Zhao L B 等人[75 ] 将DBSCAN 聚类结果作为交通模型训练由 LSTM 单元组成的循环神经网络,将循环神经网络作为船舶轨迹预测器进行实时海事异常检测.目前轨迹预测方法大多通过历史轨迹、相似轨迹建立模型,对未来轨迹进行检索和识别,但由于缺少突发性事件的历史轨迹数据,制约了轨迹预测对异常行为识别的准确度. ...
异常轨迹数据预警与预测关键技术综述
2
2017
... 全球定位系统、视频监控系统、手持移动设备和射频识别等设备的普遍应用,产生了大量运动轨迹数据[2 ] ,这为基于数据驱动的移动目标轨迹预测方法提供了数据支撑.利用海量的移动目标轨迹数据进行分析,建立合理轨迹预测模型,可实现对移动目标轨迹的准确预测,对完善智能交通系统、促进交通安全快速发展具有重要的研究意义.传统预测方法难以从复杂的历史轨迹数据中学习到轨迹结构特征和移动目标行为特征.得益于人工智能等技术的飞速发展,基于深度学习的方法被用于移动目标的轨迹预测,该技术可有效学习目标的历史行为特征,为移动目标轨迹预测研究带来了新的方向,但也存在可解释性低、实时性差等问题[3 ] .近年来,随着智能交通系统的发展,移动目标行为特征被广泛研究.基于行为驱动的移动目标轨迹预测方法可通过建立动力学模型来反映移动目标的物理运动规律,从而实现短期内的轨迹高精度预测.为了准确描述移动目标之间的相互影响,在模型中引入注意力机制可增强运动特征的显著性,去除冗余信息的干扰.同时,对目标的行为意图进行估计,然后对其轨迹进行意图识别的过程也可以用于移动目标的轨迹预测.针对不同移动目标,轨迹预测方法在物理建模和应用场景等方面存在较大差异.地面移动目标的轨迹预测可基于行为驱动建立动力学模型或对意图进行识别,但动力学模型缺乏可解释性,意图识别受限于简单场景[4 ] .海上移动目标运动空间自由、环境复杂多变、航行特征较多,基于行为驱动的移动目标轨迹预测方法常常存在难以高精度刻画目标轨迹的不足. ...
... 基于轨迹分析的目标异常行为识别一般通过大量历史轨迹数据学习移动目标的行为特征,建立正常模式下的轨迹路线和行为模式,通过轨迹预测分析预测位置和真实位置,对隐藏在正常行为模式中的异常行为进行识别[71 ,72 ,73 ] .传统轨迹预测方法结合轨迹相似度描述、轨迹聚类算法可实现对异常行为轨迹的高效提取[2 ] ,基于DBSCAN聚类算法挖掘船舶历史轨迹图谱,并将其作为判定异常行为的标准,然后利用卡尔曼滤波对船舶航行轨迹进行预测,检测异常行为并在电子海图中实时预警,实现海上异常船舶智能监管[74 ] .Zhao L B 等人[75 ] 将DBSCAN 聚类结果作为交通模型训练由 LSTM 单元组成的循环神经网络,将循环神经网络作为船舶轨迹预测器进行实时海事异常检测.目前轨迹预测方法大多通过历史轨迹、相似轨迹建立模型,对未来轨迹进行检索和识别,但由于缺少突发性事件的历史轨迹数据,制约了轨迹预测对异常行为识别的准确度. ...
Experimental evaluations on ship autonomous navigation and collision avoidance by intelligent guidance
1
2015
... 全球定位系统、视频监控系统、手持移动设备和射频识别等设备的普遍应用,产生了大量运动轨迹数据[2 ] ,这为基于数据驱动的移动目标轨迹预测方法提供了数据支撑.利用海量的移动目标轨迹数据进行分析,建立合理轨迹预测模型,可实现对移动目标轨迹的准确预测,对完善智能交通系统、促进交通安全快速发展具有重要的研究意义.传统预测方法难以从复杂的历史轨迹数据中学习到轨迹结构特征和移动目标行为特征.得益于人工智能等技术的飞速发展,基于深度学习的方法被用于移动目标的轨迹预测,该技术可有效学习目标的历史行为特征,为移动目标轨迹预测研究带来了新的方向,但也存在可解释性低、实时性差等问题[3 ] .近年来,随着智能交通系统的发展,移动目标行为特征被广泛研究.基于行为驱动的移动目标轨迹预测方法可通过建立动力学模型来反映移动目标的物理运动规律,从而实现短期内的轨迹高精度预测.为了准确描述移动目标之间的相互影响,在模型中引入注意力机制可增强运动特征的显著性,去除冗余信息的干扰.同时,对目标的行为意图进行估计,然后对其轨迹进行意图识别的过程也可以用于移动目标的轨迹预测.针对不同移动目标,轨迹预测方法在物理建模和应用场景等方面存在较大差异.地面移动目标的轨迹预测可基于行为驱动建立动力学模型或对意图进行识别,但动力学模型缺乏可解释性,意图识别受限于简单场景[4 ] .海上移动目标运动空间自由、环境复杂多变、航行特征较多,基于行为驱动的移动目标轨迹预测方法常常存在难以高精度刻画目标轨迹的不足. ...
基于深度学习的行人轨迹预测方法综述
1
2021
... 全球定位系统、视频监控系统、手持移动设备和射频识别等设备的普遍应用,产生了大量运动轨迹数据[2 ] ,这为基于数据驱动的移动目标轨迹预测方法提供了数据支撑.利用海量的移动目标轨迹数据进行分析,建立合理轨迹预测模型,可实现对移动目标轨迹的准确预测,对完善智能交通系统、促进交通安全快速发展具有重要的研究意义.传统预测方法难以从复杂的历史轨迹数据中学习到轨迹结构特征和移动目标行为特征.得益于人工智能等技术的飞速发展,基于深度学习的方法被用于移动目标的轨迹预测,该技术可有效学习目标的历史行为特征,为移动目标轨迹预测研究带来了新的方向,但也存在可解释性低、实时性差等问题[3 ] .近年来,随着智能交通系统的发展,移动目标行为特征被广泛研究.基于行为驱动的移动目标轨迹预测方法可通过建立动力学模型来反映移动目标的物理运动规律,从而实现短期内的轨迹高精度预测.为了准确描述移动目标之间的相互影响,在模型中引入注意力机制可增强运动特征的显著性,去除冗余信息的干扰.同时,对目标的行为意图进行估计,然后对其轨迹进行意图识别的过程也可以用于移动目标的轨迹预测.针对不同移动目标,轨迹预测方法在物理建模和应用场景等方面存在较大差异.地面移动目标的轨迹预测可基于行为驱动建立动力学模型或对意图进行识别,但动力学模型缺乏可解释性,意图识别受限于简单场景[4 ] .海上移动目标运动空间自由、环境复杂多变、航行特征较多,基于行为驱动的移动目标轨迹预测方法常常存在难以高精度刻画目标轨迹的不足. ...
基于深度学习的行人轨迹预测方法综述
1
2021
... 全球定位系统、视频监控系统、手持移动设备和射频识别等设备的普遍应用,产生了大量运动轨迹数据[2 ] ,这为基于数据驱动的移动目标轨迹预测方法提供了数据支撑.利用海量的移动目标轨迹数据进行分析,建立合理轨迹预测模型,可实现对移动目标轨迹的准确预测,对完善智能交通系统、促进交通安全快速发展具有重要的研究意义.传统预测方法难以从复杂的历史轨迹数据中学习到轨迹结构特征和移动目标行为特征.得益于人工智能等技术的飞速发展,基于深度学习的方法被用于移动目标的轨迹预测,该技术可有效学习目标的历史行为特征,为移动目标轨迹预测研究带来了新的方向,但也存在可解释性低、实时性差等问题[3 ] .近年来,随着智能交通系统的发展,移动目标行为特征被广泛研究.基于行为驱动的移动目标轨迹预测方法可通过建立动力学模型来反映移动目标的物理运动规律,从而实现短期内的轨迹高精度预测.为了准确描述移动目标之间的相互影响,在模型中引入注意力机制可增强运动特征的显著性,去除冗余信息的干扰.同时,对目标的行为意图进行估计,然后对其轨迹进行意图识别的过程也可以用于移动目标的轨迹预测.针对不同移动目标,轨迹预测方法在物理建模和应用场景等方面存在较大差异.地面移动目标的轨迹预测可基于行为驱动建立动力学模型或对意图进行识别,但动力学模型缺乏可解释性,意图识别受限于简单场景[4 ] .海上移动目标运动空间自由、环境复杂多变、航行特征较多,基于行为驱动的移动目标轨迹预测方法常常存在难以高精度刻画目标轨迹的不足. ...
Extended Kalman?lter for state estimation and trajectory prediction of a moving object detected by an unmanned aerial vehicle
1
2007
... 卡尔曼滤波器(Kalman filter,KF)能够对移动目标的状态行为进行估计,同时利用新的观测数据对下一时刻的轨迹进行预测.Prevost C G等人[5 ] 首先将 KF 用于轨迹预测,随后 KF被应用于短距离的车辆轨迹预测[6 ] ,基于卡尔曼滤波的动态轨迹预测算法[7 ] 经过真实移动目标数据集验证获得了较好的预测效果.针对KF模型精度不高的问题,邱洪生[8 ] 将 KF 模型与聚类后得到的船舶航行轨迹图谱进行结合,以提高轨迹预测精度.Wang Z J等人[9 ] 结合船舶欠驱动动态模型和改进的 KF 模型对船舶的航行轨迹进行预测.Vashishtha D等人[10 ] 在引入无迹卡尔曼滤波的基础上,通过考虑速度、加速度等影响因素提高了车辆的平滑弯道轨迹预测精度.KF 具有线性、无偏、方差小的优点,但其预测精度严重依赖于轨迹数据本身的间隔和误差,且无法对长时间的轨迹进行精准预测. ...
Where will the oncoming vehicle be the next second?
1
2008
... 卡尔曼滤波器(Kalman filter,KF)能够对移动目标的状态行为进行估计,同时利用新的观测数据对下一时刻的轨迹进行预测.Prevost C G等人[5 ] 首先将 KF 用于轨迹预测,随后 KF被应用于短距离的车辆轨迹预测[6 ] ,基于卡尔曼滤波的动态轨迹预测算法[7 ] 经过真实移动目标数据集验证获得了较好的预测效果.针对KF模型精度不高的问题,邱洪生[8 ] 将 KF 模型与聚类后得到的船舶航行轨迹图谱进行结合,以提高轨迹预测精度.Wang Z J等人[9 ] 结合船舶欠驱动动态模型和改进的 KF 模型对船舶的航行轨迹进行预测.Vashishtha D等人[10 ] 在引入无迹卡尔曼滤波的基础上,通过考虑速度、加速度等影响因素提高了车辆的平滑弯道轨迹预测精度.KF 具有线性、无偏、方差小的优点,但其预测精度严重依赖于轨迹数据本身的间隔和误差,且无法对长时间的轨迹进行精准预测. ...
基于卡尔曼滤波的动态轨迹预测算法
1
2018
... 卡尔曼滤波器(Kalman filter,KF)能够对移动目标的状态行为进行估计,同时利用新的观测数据对下一时刻的轨迹进行预测.Prevost C G等人[5 ] 首先将 KF 用于轨迹预测,随后 KF被应用于短距离的车辆轨迹预测[6 ] ,基于卡尔曼滤波的动态轨迹预测算法[7 ] 经过真实移动目标数据集验证获得了较好的预测效果.针对KF模型精度不高的问题,邱洪生[8 ] 将 KF 模型与聚类后得到的船舶航行轨迹图谱进行结合,以提高轨迹预测精度.Wang Z J等人[9 ] 结合船舶欠驱动动态模型和改进的 KF 模型对船舶的航行轨迹进行预测.Vashishtha D等人[10 ] 在引入无迹卡尔曼滤波的基础上,通过考虑速度、加速度等影响因素提高了车辆的平滑弯道轨迹预测精度.KF 具有线性、无偏、方差小的优点,但其预测精度严重依赖于轨迹数据本身的间隔和误差,且无法对长时间的轨迹进行精准预测. ...
基于卡尔曼滤波的动态轨迹预测算法
1
2018
... 卡尔曼滤波器(Kalman filter,KF)能够对移动目标的状态行为进行估计,同时利用新的观测数据对下一时刻的轨迹进行预测.Prevost C G等人[5 ] 首先将 KF 用于轨迹预测,随后 KF被应用于短距离的车辆轨迹预测[6 ] ,基于卡尔曼滤波的动态轨迹预测算法[7 ] 经过真实移动目标数据集验证获得了较好的预测效果.针对KF模型精度不高的问题,邱洪生[8 ] 将 KF 模型与聚类后得到的船舶航行轨迹图谱进行结合,以提高轨迹预测精度.Wang Z J等人[9 ] 结合船舶欠驱动动态模型和改进的 KF 模型对船舶的航行轨迹进行预测.Vashishtha D等人[10 ] 在引入无迹卡尔曼滤波的基础上,通过考虑速度、加速度等影响因素提高了车辆的平滑弯道轨迹预测精度.KF 具有线性、无偏、方差小的优点,但其预测精度严重依赖于轨迹数据本身的间隔和误差,且无法对长时间的轨迹进行精准预测. ...
基于卡尔曼滤波的船舶航行轨迹异常行为预测算法研究
1
2012
... 卡尔曼滤波器(Kalman filter,KF)能够对移动目标的状态行为进行估计,同时利用新的观测数据对下一时刻的轨迹进行预测.Prevost C G等人[5 ] 首先将 KF 用于轨迹预测,随后 KF被应用于短距离的车辆轨迹预测[6 ] ,基于卡尔曼滤波的动态轨迹预测算法[7 ] 经过真实移动目标数据集验证获得了较好的预测效果.针对KF模型精度不高的问题,邱洪生[8 ] 将 KF 模型与聚类后得到的船舶航行轨迹图谱进行结合,以提高轨迹预测精度.Wang Z J等人[9 ] 结合船舶欠驱动动态模型和改进的 KF 模型对船舶的航行轨迹进行预测.Vashishtha D等人[10 ] 在引入无迹卡尔曼滤波的基础上,通过考虑速度、加速度等影响因素提高了车辆的平滑弯道轨迹预测精度.KF 具有线性、无偏、方差小的优点,但其预测精度严重依赖于轨迹数据本身的间隔和误差,且无法对长时间的轨迹进行精准预测. ...
基于卡尔曼滤波的船舶航行轨迹异常行为预测算法研究
1
2012
... 卡尔曼滤波器(Kalman filter,KF)能够对移动目标的状态行为进行估计,同时利用新的观测数据对下一时刻的轨迹进行预测.Prevost C G等人[5 ] 首先将 KF 用于轨迹预测,随后 KF被应用于短距离的车辆轨迹预测[6 ] ,基于卡尔曼滤波的动态轨迹预测算法[7 ] 经过真实移动目标数据集验证获得了较好的预测效果.针对KF模型精度不高的问题,邱洪生[8 ] 将 KF 模型与聚类后得到的船舶航行轨迹图谱进行结合,以提高轨迹预测精度.Wang Z J等人[9 ] 结合船舶欠驱动动态模型和改进的 KF 模型对船舶的航行轨迹进行预测.Vashishtha D等人[10 ] 在引入无迹卡尔曼滤波的基础上,通过考虑速度、加速度等影响因素提高了车辆的平滑弯道轨迹预测精度.KF 具有线性、无偏、方差小的优点,但其预测精度严重依赖于轨迹数据本身的间隔和误差,且无法对长时间的轨迹进行精准预测. ...
Dynamic position predicting of underactuated surface vessel with unscented Kalman filter
1
2018
... 卡尔曼滤波器(Kalman filter,KF)能够对移动目标的状态行为进行估计,同时利用新的观测数据对下一时刻的轨迹进行预测.Prevost C G等人[5 ] 首先将 KF 用于轨迹预测,随后 KF被应用于短距离的车辆轨迹预测[6 ] ,基于卡尔曼滤波的动态轨迹预测算法[7 ] 经过真实移动目标数据集验证获得了较好的预测效果.针对KF模型精度不高的问题,邱洪生[8 ] 将 KF 模型与聚类后得到的船舶航行轨迹图谱进行结合,以提高轨迹预测精度.Wang Z J等人[9 ] 结合船舶欠驱动动态模型和改进的 KF 模型对船舶的航行轨迹进行预测.Vashishtha D等人[10 ] 在引入无迹卡尔曼滤波的基础上,通过考虑速度、加速度等影响因素提高了车辆的平滑弯道轨迹预测精度.KF 具有线性、无偏、方差小的优点,但其预测精度严重依赖于轨迹数据本身的间隔和误差,且无法对长时间的轨迹进行精准预测. ...
Maximum likelihood multiple model filtering for path prediction in intelligent transportation systems
1
2018
... 卡尔曼滤波器(Kalman filter,KF)能够对移动目标的状态行为进行估计,同时利用新的观测数据对下一时刻的轨迹进行预测.Prevost C G等人[5 ] 首先将 KF 用于轨迹预测,随后 KF被应用于短距离的车辆轨迹预测[6 ] ,基于卡尔曼滤波的动态轨迹预测算法[7 ] 经过真实移动目标数据集验证获得了较好的预测效果.针对KF模型精度不高的问题,邱洪生[8 ] 将 KF 模型与聚类后得到的船舶航行轨迹图谱进行结合,以提高轨迹预测精度.Wang Z J等人[9 ] 结合船舶欠驱动动态模型和改进的 KF 模型对船舶的航行轨迹进行预测.Vashishtha D等人[10 ] 在引入无迹卡尔曼滤波的基础上,通过考虑速度、加速度等影响因素提高了车辆的平滑弯道轨迹预测精度.KF 具有线性、无偏、方差小的优点,但其预测精度严重依赖于轨迹数据本身的间隔和误差,且无法对长时间的轨迹进行精准预测. ...
Spatio-temporal prediction of shopping behaviours using taxi trajectory data
1
2018
... 差分自回归移动平均(autoregressive integrated moving average,ARIMA)模型通过对海量的历史轨迹数据和当前轨迹数据进行线性组合来预测未来轨迹.ARIMA 模型的预测精度可随数据量增加而逐步提高,但仅对线性轨迹数据具有较好的敏感性[11 ,12 ,13 ] .为了提高模型对非线性轨迹数据的预测效果,高建等人[14 ] 提出了一种基于高斯混合模型与ARIMA模型的车辆轨迹预测方法,通过动态计算权重提高模型稳定性以实现准确预测.参考文献[15 -16 ]基于LSTM-ARIMA预测模型,在历史轨迹数据中加入特征数据进行预测,显著提升了模型预测效果.目前ARIMA模型被广泛应用于单变量轨迹预测,但模型仅简单计算最近位置点的平均值,依据历史轨迹趋势进行预测,实际应用中目标移动模式较难捕捉,具有一定局限性. ...
Short-term prediction of traf?c volume in urban arterials
1
1995
... 差分自回归移动平均(autoregressive integrated moving average,ARIMA)模型通过对海量的历史轨迹数据和当前轨迹数据进行线性组合来预测未来轨迹.ARIMA 模型的预测精度可随数据量增加而逐步提高,但仅对线性轨迹数据具有较好的敏感性[11 ,12 ,13 ] .为了提高模型对非线性轨迹数据的预测效果,高建等人[14 ] 提出了一种基于高斯混合模型与ARIMA模型的车辆轨迹预测方法,通过动态计算权重提高模型稳定性以实现准确预测.参考文献[15 -16 ]基于LSTM-ARIMA预测模型,在历史轨迹数据中加入特征数据进行预测,显著提升了模型预测效果.目前ARIMA模型被广泛应用于单变量轨迹预测,但模型仅简单计算最近位置点的平均值,依据历史轨迹趋势进行预测,实际应用中目标移动模式较难捕捉,具有一定局限性. ...
Forecasting traf?c volume with space-time ARIMA model
3
2011
... 差分自回归移动平均(autoregressive integrated moving average,ARIMA)模型通过对海量的历史轨迹数据和当前轨迹数据进行线性组合来预测未来轨迹.ARIMA 模型的预测精度可随数据量增加而逐步提高,但仅对线性轨迹数据具有较好的敏感性[11 ,12 ,13 ] .为了提高模型对非线性轨迹数据的预测效果,高建等人[14 ] 提出了一种基于高斯混合模型与ARIMA模型的车辆轨迹预测方法,通过动态计算权重提高模型稳定性以实现准确预测.参考文献[15 -16 ]基于LSTM-ARIMA预测模型,在历史轨迹数据中加入特征数据进行预测,显著提升了模型预测效果.目前ARIMA模型被广泛应用于单变量轨迹预测,但模型仅简单计算最近位置点的平均值,依据历史轨迹趋势进行预测,实际应用中目标移动模式较难捕捉,具有一定局限性. ...
... 循环神经网络(recurrent neural network,RNN)能够捕捉时间特征且具有短时记忆功能,Min K等人[42 ] 首先基于 RNN 对车辆的障碍物路径进行预测,然后通过预测路径的不确定性预测车辆的轨迹.但在 RNN 预测较长的轨迹数据时,参数选取不当会引起梯度消失或者爆炸,导致预测结果存在较大的误差.长短期记忆(long short-term memory, LSTM)网络在RNN结构的基础上增加了输入门、遗忘门和输出门,实现了对状态信息的筛选,解决了神经网络中长序列依赖等问题.针对地面移动目标,利用LSTM算法能准确预测高速公路上车辆的未来纵向和横向轨迹[43 ] ,同时可对周边车辆进行远视轨迹预测,有效提高交互式驾驶环境中的预测精度[44 ] ;海上移动目标特征复杂,LSTM算法可将船舶的特征作为网络的输入实现船舶航行轨迹的动态预测[15 ] .参考文献[13 ]和参考文献[45 ]进一步优化LSTM网络模型,分别提出蚁群优化算法和社会长短期记忆网络来提高预测模型性能[46 ] . ...
... 基于意图识别的移动目标轨迹预测方法对移动目标的行为意图进行估计,然后再对其轨迹进行预测,大致可分为生成式模型和判别式模型[62 ] 两种.图5 描述了基于意图识别的移动目标轨迹预测过程.在生成式模型中,Ding Q Y等人[13 ] 对车辆驾驶员的意图进行预测,生成了具有可解释性的多模式轨迹.丁洁云等人[63 ] 在车辆换道的情景下,通过生成的综合决策因子对驾驶意图进行识别,训练HMM,预测车辆换道或直行.He G等人[64 ] 通过构建动态贝叶斯网络来推断司机执行某种驾驶操作的概率,预测司机的驾驶意图,进一步对车辆的轨迹进行预测.在判别式模型中,移动目标的意图一般采用分类算法进行识别,如HMM和SVM等[65 ] .季学武等人[66 ] 在高速公路直线路段先利用 Softmax函数计算出各种驾驶意图的概率,最后采用LSTM预测司机的驾驶意图,显著提高了轨迹预测精度.刘璐[62 ] 在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹. ...
基于高斯混合-时间序列模型的轨迹预测
1
2019
... 差分自回归移动平均(autoregressive integrated moving average,ARIMA)模型通过对海量的历史轨迹数据和当前轨迹数据进行线性组合来预测未来轨迹.ARIMA 模型的预测精度可随数据量增加而逐步提高,但仅对线性轨迹数据具有较好的敏感性[11 ,12 ,13 ] .为了提高模型对非线性轨迹数据的预测效果,高建等人[14 ] 提出了一种基于高斯混合模型与ARIMA模型的车辆轨迹预测方法,通过动态计算权重提高模型稳定性以实现准确预测.参考文献[15 -16 ]基于LSTM-ARIMA预测模型,在历史轨迹数据中加入特征数据进行预测,显著提升了模型预测效果.目前ARIMA模型被广泛应用于单变量轨迹预测,但模型仅简单计算最近位置点的平均值,依据历史轨迹趋势进行预测,实际应用中目标移动模式较难捕捉,具有一定局限性. ...
基于高斯混合-时间序列模型的轨迹预测
1
2019
... 差分自回归移动平均(autoregressive integrated moving average,ARIMA)模型通过对海量的历史轨迹数据和当前轨迹数据进行线性组合来预测未来轨迹.ARIMA 模型的预测精度可随数据量增加而逐步提高,但仅对线性轨迹数据具有较好的敏感性[11 ,12 ,13 ] .为了提高模型对非线性轨迹数据的预测效果,高建等人[14 ] 提出了一种基于高斯混合模型与ARIMA模型的车辆轨迹预测方法,通过动态计算权重提高模型稳定性以实现准确预测.参考文献[15 -16 ]基于LSTM-ARIMA预测模型,在历史轨迹数据中加入特征数据进行预测,显著提升了模型预测效果.目前ARIMA模型被广泛应用于单变量轨迹预测,但模型仅简单计算最近位置点的平均值,依据历史轨迹趋势进行预测,实际应用中目标移动模式较难捕捉,具有一定局限性. ...
基于AIS数据和LSTM网络的船舶航行动态预测
2
2019
... 差分自回归移动平均(autoregressive integrated moving average,ARIMA)模型通过对海量的历史轨迹数据和当前轨迹数据进行线性组合来预测未来轨迹.ARIMA 模型的预测精度可随数据量增加而逐步提高,但仅对线性轨迹数据具有较好的敏感性[11 ,12 ,13 ] .为了提高模型对非线性轨迹数据的预测效果,高建等人[14 ] 提出了一种基于高斯混合模型与ARIMA模型的车辆轨迹预测方法,通过动态计算权重提高模型稳定性以实现准确预测.参考文献[15 -16 ]基于LSTM-ARIMA预测模型,在历史轨迹数据中加入特征数据进行预测,显著提升了模型预测效果.目前ARIMA模型被广泛应用于单变量轨迹预测,但模型仅简单计算最近位置点的平均值,依据历史轨迹趋势进行预测,实际应用中目标移动模式较难捕捉,具有一定局限性. ...
... 循环神经网络(recurrent neural network,RNN)能够捕捉时间特征且具有短时记忆功能,Min K等人[42 ] 首先基于 RNN 对车辆的障碍物路径进行预测,然后通过预测路径的不确定性预测车辆的轨迹.但在 RNN 预测较长的轨迹数据时,参数选取不当会引起梯度消失或者爆炸,导致预测结果存在较大的误差.长短期记忆(long short-term memory, LSTM)网络在RNN结构的基础上增加了输入门、遗忘门和输出门,实现了对状态信息的筛选,解决了神经网络中长序列依赖等问题.针对地面移动目标,利用LSTM算法能准确预测高速公路上车辆的未来纵向和横向轨迹[43 ] ,同时可对周边车辆进行远视轨迹预测,有效提高交互式驾驶环境中的预测精度[44 ] ;海上移动目标特征复杂,LSTM算法可将船舶的特征作为网络的输入实现船舶航行轨迹的动态预测[15 ] .参考文献[13 ]和参考文献[45 ]进一步优化LSTM网络模型,分别提出蚁群优化算法和社会长短期记忆网络来提高预测模型性能[46 ] . ...
基于AIS数据和LSTM网络的船舶航行动态预测
2
2019
... 差分自回归移动平均(autoregressive integrated moving average,ARIMA)模型通过对海量的历史轨迹数据和当前轨迹数据进行线性组合来预测未来轨迹.ARIMA 模型的预测精度可随数据量增加而逐步提高,但仅对线性轨迹数据具有较好的敏感性[11 ,12 ,13 ] .为了提高模型对非线性轨迹数据的预测效果,高建等人[14 ] 提出了一种基于高斯混合模型与ARIMA模型的车辆轨迹预测方法,通过动态计算权重提高模型稳定性以实现准确预测.参考文献[15 -16 ]基于LSTM-ARIMA预测模型,在历史轨迹数据中加入特征数据进行预测,显著提升了模型预测效果.目前ARIMA模型被广泛应用于单变量轨迹预测,但模型仅简单计算最近位置点的平均值,依据历史轨迹趋势进行预测,实际应用中目标移动模式较难捕捉,具有一定局限性. ...
... 循环神经网络(recurrent neural network,RNN)能够捕捉时间特征且具有短时记忆功能,Min K等人[42 ] 首先基于 RNN 对车辆的障碍物路径进行预测,然后通过预测路径的不确定性预测车辆的轨迹.但在 RNN 预测较长的轨迹数据时,参数选取不当会引起梯度消失或者爆炸,导致预测结果存在较大的误差.长短期记忆(long short-term memory, LSTM)网络在RNN结构的基础上增加了输入门、遗忘门和输出门,实现了对状态信息的筛选,解决了神经网络中长序列依赖等问题.针对地面移动目标,利用LSTM算法能准确预测高速公路上车辆的未来纵向和横向轨迹[43 ] ,同时可对周边车辆进行远视轨迹预测,有效提高交互式驾驶环境中的预测精度[44 ] ;海上移动目标特征复杂,LSTM算法可将船舶的特征作为网络的输入实现船舶航行轨迹的动态预测[15 ] .参考文献[13 ]和参考文献[45 ]进一步优化LSTM网络模型,分别提出蚁群优化算法和社会长短期记忆网络来提高预测模型性能[46 ] . ...
基于LSTM-ARIMA的短期航迹预测方法研究及可视化系统开发
1
2020
... 差分自回归移动平均(autoregressive integrated moving average,ARIMA)模型通过对海量的历史轨迹数据和当前轨迹数据进行线性组合来预测未来轨迹.ARIMA 模型的预测精度可随数据量增加而逐步提高,但仅对线性轨迹数据具有较好的敏感性[11 ,12 ,13 ] .为了提高模型对非线性轨迹数据的预测效果,高建等人[14 ] 提出了一种基于高斯混合模型与ARIMA模型的车辆轨迹预测方法,通过动态计算权重提高模型稳定性以实现准确预测.参考文献[15 -16 ]基于LSTM-ARIMA预测模型,在历史轨迹数据中加入特征数据进行预测,显著提升了模型预测效果.目前ARIMA模型被广泛应用于单变量轨迹预测,但模型仅简单计算最近位置点的平均值,依据历史轨迹趋势进行预测,实际应用中目标移动模式较难捕捉,具有一定局限性. ...
基于LSTM-ARIMA的短期航迹预测方法研究及可视化系统开发
1
2020
... 差分自回归移动平均(autoregressive integrated moving average,ARIMA)模型通过对海量的历史轨迹数据和当前轨迹数据进行线性组合来预测未来轨迹.ARIMA 模型的预测精度可随数据量增加而逐步提高,但仅对线性轨迹数据具有较好的敏感性[11 ,12 ,13 ] .为了提高模型对非线性轨迹数据的预测效果,高建等人[14 ] 提出了一种基于高斯混合模型与ARIMA模型的车辆轨迹预测方法,通过动态计算权重提高模型稳定性以实现准确预测.参考文献[15 -16 ]基于LSTM-ARIMA预测模型,在历史轨迹数据中加入特征数据进行预测,显著提升了模型预测效果.目前ARIMA模型被广泛应用于单变量轨迹预测,但模型仅简单计算最近位置点的平均值,依据历史轨迹趋势进行预测,实际应用中目标移动模式较难捕捉,具有一定局限性. ...
Predicting future locations with hidden Markov models
1
2012
... 隐马尔可夫模型(hidden Markov model,HMM)能够通过计算给定序列数据的概率分布解决轨迹等时间序列预测问题.在实际应用中,HMM 预测需人为设置参数,从而导致了预测误差[17 ] .针对模型参数设置复杂的问题,自适应地选择参数[18 ] 或基于混合HMM观察状态参数[19 ] 的策略可有效提高轨迹预测效果.Zhang X Y等人[20 ] 在原始HMM中加入小波分析以提高船舶航行轨迹的预测精度,利用优化后的HMM可获得较好的预测结果,解决了预测误差累积的问题.经过网格化预处理的数据易引起误差,进而降低预测模型的鲁棒性和计算精度,因此在实际预测问题中,HMM 的预测精度往往受到限制. ...
A self-adaptive parameter selection trajectory prediction approach via hidden Markov models
1
2015
... 隐马尔可夫模型(hidden Markov model,HMM)能够通过计算给定序列数据的概率分布解决轨迹等时间序列预测问题.在实际应用中,HMM 预测需人为设置参数,从而导致了预测误差[17 ] .针对模型参数设置复杂的问题,自适应地选择参数[18 ] 或基于混合HMM观察状态参数[19 ] 的策略可有效提高轨迹预测效果.Zhang X Y等人[20 ] 在原始HMM中加入小波分析以提高船舶航行轨迹的预测精度,利用优化后的HMM可获得较好的预测结果,解决了预测误差累积的问题.经过网格化预处理的数据易引起误差,进而降低预测模型的鲁棒性和计算精度,因此在实际预测问题中,HMM 的预测精度往往受到限制. ...
Pedestrian-movement prediction based on mixed Markov-chain model
1
2011
... 隐马尔可夫模型(hidden Markov model,HMM)能够通过计算给定序列数据的概率分布解决轨迹等时间序列预测问题.在实际应用中,HMM 预测需人为设置参数,从而导致了预测误差[17 ] .针对模型参数设置复杂的问题,自适应地选择参数[18 ] 或基于混合HMM观察状态参数[19 ] 的策略可有效提高轨迹预测效果.Zhang X Y等人[20 ] 在原始HMM中加入小波分析以提高船舶航行轨迹的预测精度,利用优化后的HMM可获得较好的预测结果,解决了预测误差累积的问题.经过网格化预处理的数据易引起误差,进而降低预测模型的鲁棒性和计算精度,因此在实际预测问题中,HMM 的预测精度往往受到限制. ...
Wavelet analysis based hidden Markov model for large ship trajectory prediction
1
2019
... 隐马尔可夫模型(hidden Markov model,HMM)能够通过计算给定序列数据的概率分布解决轨迹等时间序列预测问题.在实际应用中,HMM 预测需人为设置参数,从而导致了预测误差[17 ] .针对模型参数设置复杂的问题,自适应地选择参数[18 ] 或基于混合HMM观察状态参数[19 ] 的策略可有效提高轨迹预测效果.Zhang X Y等人[20 ] 在原始HMM中加入小波分析以提高船舶航行轨迹的预测精度,利用优化后的HMM可获得较好的预测结果,解决了预测误差累积的问题.经过网格化预处理的数据易引起误差,进而降低预测模型的鲁棒性和计算精度,因此在实际预测问题中,HMM 的预测精度往往受到限制. ...
The neighbor course distribution method with Gaussian mixture models for AIS-based vessel trajectory prediction
1
2018
... 高斯混合模型(Gaussian mixture model,GMM)由多个高斯概率分布的密度函数组合而成,该模型能够计算出移动目标轨迹的联合分布概率,将历史轨迹输入模型,进而预测未来轨迹.Dalsnes B R等人[21 ] 基于GMM对船舶轨迹进行短期预测,同时提供了不确定性度量.乔少杰等人[22 ] 利用高斯混合轨迹预测模型计算移动目标在不同运动模式下的概率分布,最后利用高斯过程回归对移动目标的未来轨迹点进行预测,但预测会产生延迟,而且单一模型的预测精度较低.为了解决此问题,预测精度优于 GMM 的变高斯混合模型(variable Gaussian mixture model,VGMM)以及高斯过程回归(Gaussian process regression,GPR)模型被应用于轨迹预测[23 ,24 ,25 ] .林毅等人[26 ] 首先基于GMM 对航迹相对位置偏移量进行建模,然后利用机器学习方法进行预测,最终得到更准确更平稳的预测轨迹.基于 GMM 的预测方法对噪声轨迹的预测效果较好,但当轨迹数据复杂度提高时,该方法不再具有较好的适用性[27 ] . ...
一种基于高斯混合模型的轨迹预测算法
1
2015
... 高斯混合模型(Gaussian mixture model,GMM)由多个高斯概率分布的密度函数组合而成,该模型能够计算出移动目标轨迹的联合分布概率,将历史轨迹输入模型,进而预测未来轨迹.Dalsnes B R等人[21 ] 基于GMM对船舶轨迹进行短期预测,同时提供了不确定性度量.乔少杰等人[22 ] 利用高斯混合轨迹预测模型计算移动目标在不同运动模式下的概率分布,最后利用高斯过程回归对移动目标的未来轨迹点进行预测,但预测会产生延迟,而且单一模型的预测精度较低.为了解决此问题,预测精度优于 GMM 的变高斯混合模型(variable Gaussian mixture model,VGMM)以及高斯过程回归(Gaussian process regression,GPR)模型被应用于轨迹预测[23 ,24 ,25 ] .林毅等人[26 ] 首先基于GMM 对航迹相对位置偏移量进行建模,然后利用机器学习方法进行预测,最终得到更准确更平稳的预测轨迹.基于 GMM 的预测方法对噪声轨迹的预测效果较好,但当轨迹数据复杂度提高时,该方法不再具有较好的适用性[27 ] . ...
一种基于高斯混合模型的轨迹预测算法
1
2015
... 高斯混合模型(Gaussian mixture model,GMM)由多个高斯概率分布的密度函数组合而成,该模型能够计算出移动目标轨迹的联合分布概率,将历史轨迹输入模型,进而预测未来轨迹.Dalsnes B R等人[21 ] 基于GMM对船舶轨迹进行短期预测,同时提供了不确定性度量.乔少杰等人[22 ] 利用高斯混合轨迹预测模型计算移动目标在不同运动模式下的概率分布,最后利用高斯过程回归对移动目标的未来轨迹点进行预测,但预测会产生延迟,而且单一模型的预测精度较低.为了解决此问题,预测精度优于 GMM 的变高斯混合模型(variable Gaussian mixture model,VGMM)以及高斯过程回归(Gaussian process regression,GPR)模型被应用于轨迹预测[23 ,24 ,25 ] .林毅等人[26 ] 首先基于GMM 对航迹相对位置偏移量进行建模,然后利用机器学习方法进行预测,最终得到更准确更平稳的预测轨迹.基于 GMM 的预测方法对噪声轨迹的预测效果较好,但当轨迹数据复杂度提高时,该方法不再具有较好的适用性[27 ] . ...
Probabilistic trajectory prediction with Gaussian mixture models
1
2012
... 高斯混合模型(Gaussian mixture model,GMM)由多个高斯概率分布的密度函数组合而成,该模型能够计算出移动目标轨迹的联合分布概率,将历史轨迹输入模型,进而预测未来轨迹.Dalsnes B R等人[21 ] 基于GMM对船舶轨迹进行短期预测,同时提供了不确定性度量.乔少杰等人[22 ] 利用高斯混合轨迹预测模型计算移动目标在不同运动模式下的概率分布,最后利用高斯过程回归对移动目标的未来轨迹点进行预测,但预测会产生延迟,而且单一模型的预测精度较低.为了解决此问题,预测精度优于 GMM 的变高斯混合模型(variable Gaussian mixture model,VGMM)以及高斯过程回归(Gaussian process regression,GPR)模型被应用于轨迹预测[23 ,24 ,25 ] .林毅等人[26 ] 首先基于GMM 对航迹相对位置偏移量进行建模,然后利用机器学习方法进行预测,最终得到更准确更平稳的预测轨迹.基于 GMM 的预测方法对噪声轨迹的预测效果较好,但当轨迹数据复杂度提高时,该方法不再具有较好的适用性[27 ] . ...
Gaussian process auto regression for vehicle center coordinates trajectory prediction
1
2019
... 高斯混合模型(Gaussian mixture model,GMM)由多个高斯概率分布的密度函数组合而成,该模型能够计算出移动目标轨迹的联合分布概率,将历史轨迹输入模型,进而预测未来轨迹.Dalsnes B R等人[21 ] 基于GMM对船舶轨迹进行短期预测,同时提供了不确定性度量.乔少杰等人[22 ] 利用高斯混合轨迹预测模型计算移动目标在不同运动模式下的概率分布,最后利用高斯过程回归对移动目标的未来轨迹点进行预测,但预测会产生延迟,而且单一模型的预测精度较低.为了解决此问题,预测精度优于 GMM 的变高斯混合模型(variable Gaussian mixture model,VGMM)以及高斯过程回归(Gaussian process regression,GPR)模型被应用于轨迹预测[23 ,24 ,25 ] .林毅等人[26 ] 首先基于GMM 对航迹相对位置偏移量进行建模,然后利用机器学习方法进行预测,最终得到更准确更平稳的预测轨迹.基于 GMM 的预测方法对噪声轨迹的预测效果较好,但当轨迹数据复杂度提高时,该方法不再具有较好的适用性[27 ] . ...
基于GPR模型的船舶自适应轨迹预测及应用研究
1
2019
... 高斯混合模型(Gaussian mixture model,GMM)由多个高斯概率分布的密度函数组合而成,该模型能够计算出移动目标轨迹的联合分布概率,将历史轨迹输入模型,进而预测未来轨迹.Dalsnes B R等人[21 ] 基于GMM对船舶轨迹进行短期预测,同时提供了不确定性度量.乔少杰等人[22 ] 利用高斯混合轨迹预测模型计算移动目标在不同运动模式下的概率分布,最后利用高斯过程回归对移动目标的未来轨迹点进行预测,但预测会产生延迟,而且单一模型的预测精度较低.为了解决此问题,预测精度优于 GMM 的变高斯混合模型(variable Gaussian mixture model,VGMM)以及高斯过程回归(Gaussian process regression,GPR)模型被应用于轨迹预测[23 ,24 ,25 ] .林毅等人[26 ] 首先基于GMM 对航迹相对位置偏移量进行建模,然后利用机器学习方法进行预测,最终得到更准确更平稳的预测轨迹.基于 GMM 的预测方法对噪声轨迹的预测效果较好,但当轨迹数据复杂度提高时,该方法不再具有较好的适用性[27 ] . ...
基于GPR模型的船舶自适应轨迹预测及应用研究
1
2019
... 高斯混合模型(Gaussian mixture model,GMM)由多个高斯概率分布的密度函数组合而成,该模型能够计算出移动目标轨迹的联合分布概率,将历史轨迹输入模型,进而预测未来轨迹.Dalsnes B R等人[21 ] 基于GMM对船舶轨迹进行短期预测,同时提供了不确定性度量.乔少杰等人[22 ] 利用高斯混合轨迹预测模型计算移动目标在不同运动模式下的概率分布,最后利用高斯过程回归对移动目标的未来轨迹点进行预测,但预测会产生延迟,而且单一模型的预测精度较低.为了解决此问题,预测精度优于 GMM 的变高斯混合模型(variable Gaussian mixture model,VGMM)以及高斯过程回归(Gaussian process regression,GPR)模型被应用于轨迹预测[23 ,24 ,25 ] .林毅等人[26 ] 首先基于GMM 对航迹相对位置偏移量进行建模,然后利用机器学习方法进行预测,最终得到更准确更平稳的预测轨迹.基于 GMM 的预测方法对噪声轨迹的预测效果较好,但当轨迹数据复杂度提高时,该方法不再具有较好的适用性[27 ] . ...
基于 GMM 的航班轨迹预测算法研究
1
2018
... 高斯混合模型(Gaussian mixture model,GMM)由多个高斯概率分布的密度函数组合而成,该模型能够计算出移动目标轨迹的联合分布概率,将历史轨迹输入模型,进而预测未来轨迹.Dalsnes B R等人[21 ] 基于GMM对船舶轨迹进行短期预测,同时提供了不确定性度量.乔少杰等人[22 ] 利用高斯混合轨迹预测模型计算移动目标在不同运动模式下的概率分布,最后利用高斯过程回归对移动目标的未来轨迹点进行预测,但预测会产生延迟,而且单一模型的预测精度较低.为了解决此问题,预测精度优于 GMM 的变高斯混合模型(variable Gaussian mixture model,VGMM)以及高斯过程回归(Gaussian process regression,GPR)模型被应用于轨迹预测[23 ,24 ,25 ] .林毅等人[26 ] 首先基于GMM 对航迹相对位置偏移量进行建模,然后利用机器学习方法进行预测,最终得到更准确更平稳的预测轨迹.基于 GMM 的预测方法对噪声轨迹的预测效果较好,但当轨迹数据复杂度提高时,该方法不再具有较好的适用性[27 ] . ...
基于 GMM 的航班轨迹预测算法研究
1
2018
... 高斯混合模型(Gaussian mixture model,GMM)由多个高斯概率分布的密度函数组合而成,该模型能够计算出移动目标轨迹的联合分布概率,将历史轨迹输入模型,进而预测未来轨迹.Dalsnes B R等人[21 ] 基于GMM对船舶轨迹进行短期预测,同时提供了不确定性度量.乔少杰等人[22 ] 利用高斯混合轨迹预测模型计算移动目标在不同运动模式下的概率分布,最后利用高斯过程回归对移动目标的未来轨迹点进行预测,但预测会产生延迟,而且单一模型的预测精度较低.为了解决此问题,预测精度优于 GMM 的变高斯混合模型(variable Gaussian mixture model,VGMM)以及高斯过程回归(Gaussian process regression,GPR)模型被应用于轨迹预测[23 ,24 ,25 ] .林毅等人[26 ] 首先基于GMM 对航迹相对位置偏移量进行建模,然后利用机器学习方法进行预测,最终得到更准确更平稳的预测轨迹.基于 GMM 的预测方法对噪声轨迹的预测效果较好,但当轨迹数据复杂度提高时,该方法不再具有较好的适用性[27 ] . ...
基于高斯混合-变分自编码器的轨迹预测算法
1
2020
... 高斯混合模型(Gaussian mixture model,GMM)由多个高斯概率分布的密度函数组合而成,该模型能够计算出移动目标轨迹的联合分布概率,将历史轨迹输入模型,进而预测未来轨迹.Dalsnes B R等人[21 ] 基于GMM对船舶轨迹进行短期预测,同时提供了不确定性度量.乔少杰等人[22 ] 利用高斯混合轨迹预测模型计算移动目标在不同运动模式下的概率分布,最后利用高斯过程回归对移动目标的未来轨迹点进行预测,但预测会产生延迟,而且单一模型的预测精度较低.为了解决此问题,预测精度优于 GMM 的变高斯混合模型(variable Gaussian mixture model,VGMM)以及高斯过程回归(Gaussian process regression,GPR)模型被应用于轨迹预测[23 ,24 ,25 ] .林毅等人[26 ] 首先基于GMM 对航迹相对位置偏移量进行建模,然后利用机器学习方法进行预测,最终得到更准确更平稳的预测轨迹.基于 GMM 的预测方法对噪声轨迹的预测效果较好,但当轨迹数据复杂度提高时,该方法不再具有较好的适用性[27 ] . ...
基于高斯混合-变分自编码器的轨迹预测算法
1
2020
... 高斯混合模型(Gaussian mixture model,GMM)由多个高斯概率分布的密度函数组合而成,该模型能够计算出移动目标轨迹的联合分布概率,将历史轨迹输入模型,进而预测未来轨迹.Dalsnes B R等人[21 ] 基于GMM对船舶轨迹进行短期预测,同时提供了不确定性度量.乔少杰等人[22 ] 利用高斯混合轨迹预测模型计算移动目标在不同运动模式下的概率分布,最后利用高斯过程回归对移动目标的未来轨迹点进行预测,但预测会产生延迟,而且单一模型的预测精度较低.为了解决此问题,预测精度优于 GMM 的变高斯混合模型(variable Gaussian mixture model,VGMM)以及高斯过程回归(Gaussian process regression,GPR)模型被应用于轨迹预测[23 ,24 ,25 ] .林毅等人[26 ] 首先基于GMM 对航迹相对位置偏移量进行建模,然后利用机器学习方法进行预测,最终得到更准确更平稳的预测轨迹.基于 GMM 的预测方法对噪声轨迹的预测效果较好,但当轨迹数据复杂度提高时,该方法不再具有较好的适用性[27 ] . ...
基于 CTBN 的移动对象不确定轨迹预测算法
1
2012
... 贝叶斯网络本质上是一种概率图形模型,该模型的网络拓扑结构是一个有向无环图.乔少杰等人[28 ] 依据贝叶斯网络原理,提出了一种基于轨迹时间连续贝叶斯网络的移动目标不确定轨迹预测方法,充分考虑移动目标的运动速度及方向对未来轨迹的影响.段炼等人[29 ] 提出了一种贝叶斯位置时空预测模型,结合相似群体轨迹数据和位置语义信息预测嫌疑犯活动行踪.王垒等人[30 ] 基于贝叶斯网络对内河船舶的航行轨迹进行预测,并应用于船舶避碰与航线规划.李万高等人[31 ] 将历史轨迹分解后,对相邻位置信息进行处理,提升了传统贝叶斯模型的时效性和精准度.基于贝叶斯网络的预测过程应用了决策者的主观信息,从而保证了预测结果的可靠性.但在实际应用中,受先验概率等因素的影响,贝叶斯网络的预测效果存在局限性. ...
基于 CTBN 的移动对象不确定轨迹预测算法
1
2012
... 贝叶斯网络本质上是一种概率图形模型,该模型的网络拓扑结构是一个有向无环图.乔少杰等人[28 ] 依据贝叶斯网络原理,提出了一种基于轨迹时间连续贝叶斯网络的移动目标不确定轨迹预测方法,充分考虑移动目标的运动速度及方向对未来轨迹的影响.段炼等人[29 ] 提出了一种贝叶斯位置时空预测模型,结合相似群体轨迹数据和位置语义信息预测嫌疑犯活动行踪.王垒等人[30 ] 基于贝叶斯网络对内河船舶的航行轨迹进行预测,并应用于船舶避碰与航线规划.李万高等人[31 ] 将历史轨迹分解后,对相邻位置信息进行处理,提升了传统贝叶斯模型的时效性和精准度.基于贝叶斯网络的预测过程应用了决策者的主观信息,从而保证了预测结果的可靠性.但在实际应用中,受先验概率等因素的影响,贝叶斯网络的预测效果存在局限性. ...
顾及时空语义的疑犯位置时空预测
1
2019
... 贝叶斯网络本质上是一种概率图形模型,该模型的网络拓扑结构是一个有向无环图.乔少杰等人[28 ] 依据贝叶斯网络原理,提出了一种基于轨迹时间连续贝叶斯网络的移动目标不确定轨迹预测方法,充分考虑移动目标的运动速度及方向对未来轨迹的影响.段炼等人[29 ] 提出了一种贝叶斯位置时空预测模型,结合相似群体轨迹数据和位置语义信息预测嫌疑犯活动行踪.王垒等人[30 ] 基于贝叶斯网络对内河船舶的航行轨迹进行预测,并应用于船舶避碰与航线规划.李万高等人[31 ] 将历史轨迹分解后,对相邻位置信息进行处理,提升了传统贝叶斯模型的时效性和精准度.基于贝叶斯网络的预测过程应用了决策者的主观信息,从而保证了预测结果的可靠性.但在实际应用中,受先验概率等因素的影响,贝叶斯网络的预测效果存在局限性. ...
顾及时空语义的疑犯位置时空预测
1
2019
... 贝叶斯网络本质上是一种概率图形模型,该模型的网络拓扑结构是一个有向无环图.乔少杰等人[28 ] 依据贝叶斯网络原理,提出了一种基于轨迹时间连续贝叶斯网络的移动目标不确定轨迹预测方法,充分考虑移动目标的运动速度及方向对未来轨迹的影响.段炼等人[29 ] 提出了一种贝叶斯位置时空预测模型,结合相似群体轨迹数据和位置语义信息预测嫌疑犯活动行踪.王垒等人[30 ] 基于贝叶斯网络对内河船舶的航行轨迹进行预测,并应用于船舶避碰与航线规划.李万高等人[31 ] 将历史轨迹分解后,对相邻位置信息进行处理,提升了传统贝叶斯模型的时效性和精准度.基于贝叶斯网络的预测过程应用了决策者的主观信息,从而保证了预测结果的可靠性.但在实际应用中,受先验概率等因素的影响,贝叶斯网络的预测效果存在局限性. ...
内河航道船舶避碰轨迹规划与预测
1
2019
... 贝叶斯网络本质上是一种概率图形模型,该模型的网络拓扑结构是一个有向无环图.乔少杰等人[28 ] 依据贝叶斯网络原理,提出了一种基于轨迹时间连续贝叶斯网络的移动目标不确定轨迹预测方法,充分考虑移动目标的运动速度及方向对未来轨迹的影响.段炼等人[29 ] 提出了一种贝叶斯位置时空预测模型,结合相似群体轨迹数据和位置语义信息预测嫌疑犯活动行踪.王垒等人[30 ] 基于贝叶斯网络对内河船舶的航行轨迹进行预测,并应用于船舶避碰与航线规划.李万高等人[31 ] 将历史轨迹分解后,对相邻位置信息进行处理,提升了传统贝叶斯模型的时效性和精准度.基于贝叶斯网络的预测过程应用了决策者的主观信息,从而保证了预测结果的可靠性.但在实际应用中,受先验概率等因素的影响,贝叶斯网络的预测效果存在局限性. ...
内河航道船舶避碰轨迹规划与预测
1
2019
... 贝叶斯网络本质上是一种概率图形模型,该模型的网络拓扑结构是一个有向无环图.乔少杰等人[28 ] 依据贝叶斯网络原理,提出了一种基于轨迹时间连续贝叶斯网络的移动目标不确定轨迹预测方法,充分考虑移动目标的运动速度及方向对未来轨迹的影响.段炼等人[29 ] 提出了一种贝叶斯位置时空预测模型,结合相似群体轨迹数据和位置语义信息预测嫌疑犯活动行踪.王垒等人[30 ] 基于贝叶斯网络对内河船舶的航行轨迹进行预测,并应用于船舶避碰与航线规划.李万高等人[31 ] 将历史轨迹分解后,对相邻位置信息进行处理,提升了传统贝叶斯模型的时效性和精准度.基于贝叶斯网络的预测过程应用了决策者的主观信息,从而保证了预测结果的可靠性.但在实际应用中,受先验概率等因素的影响,贝叶斯网络的预测效果存在局限性. ...
基于改进贝叶斯方法的轨迹预测算法研究
1
2013
... 贝叶斯网络本质上是一种概率图形模型,该模型的网络拓扑结构是一个有向无环图.乔少杰等人[28 ] 依据贝叶斯网络原理,提出了一种基于轨迹时间连续贝叶斯网络的移动目标不确定轨迹预测方法,充分考虑移动目标的运动速度及方向对未来轨迹的影响.段炼等人[29 ] 提出了一种贝叶斯位置时空预测模型,结合相似群体轨迹数据和位置语义信息预测嫌疑犯活动行踪.王垒等人[30 ] 基于贝叶斯网络对内河船舶的航行轨迹进行预测,并应用于船舶避碰与航线规划.李万高等人[31 ] 将历史轨迹分解后,对相邻位置信息进行处理,提升了传统贝叶斯模型的时效性和精准度.基于贝叶斯网络的预测过程应用了决策者的主观信息,从而保证了预测结果的可靠性.但在实际应用中,受先验概率等因素的影响,贝叶斯网络的预测效果存在局限性. ...
基于改进贝叶斯方法的轨迹预测算法研究
1
2013
... 贝叶斯网络本质上是一种概率图形模型,该模型的网络拓扑结构是一个有向无环图.乔少杰等人[28 ] 依据贝叶斯网络原理,提出了一种基于轨迹时间连续贝叶斯网络的移动目标不确定轨迹预测方法,充分考虑移动目标的运动速度及方向对未来轨迹的影响.段炼等人[29 ] 提出了一种贝叶斯位置时空预测模型,结合相似群体轨迹数据和位置语义信息预测嫌疑犯活动行踪.王垒等人[30 ] 基于贝叶斯网络对内河船舶的航行轨迹进行预测,并应用于船舶避碰与航线规划.李万高等人[31 ] 将历史轨迹分解后,对相邻位置信息进行处理,提升了传统贝叶斯模型的时效性和精准度.基于贝叶斯网络的预测过程应用了决策者的主观信息,从而保证了预测结果的可靠性.但在实际应用中,受先验概率等因素的影响,贝叶斯网络的预测效果存在局限性. ...
基于 BP神经网络的船舶航迹实时预测
1
2012
... 随着人工神经网络的不断发展,其相关技术已被应用于轨迹预测.在一些简单的预测任务中, BP 神经网络模型可将移动目标的历史轨迹数据输入神经网络中进行训练,以学习目标轨迹的运动特征,进而根据该运动特征对未来轨迹进行预测.徐婷婷等人[32 ] 设计了基于三层 BP 神经网络的航迹预测模型,将航向、航速作为输入,经度差、纬度差作为输出,可实现实时预测.杨淳[33 ] 基于BP神经网络建立了自治式潜水器(autonomous underwater vehicle,AUV)航行轨迹预测模型,该模型以轨迹数据及 AUV 周围的环境要素为训练样本对网络模型进行训练,最终预测出AUV的未来航行轨迹.杨彬等人[34 ] 构建神经网络模型对高超声速飞行器的历史轨迹进行训练,预测其未来航行轨迹.BP神经网络收敛速度过慢,为了提高预测时效性和精准度,马国兵等人[35 ] 利用遗传算法改进BP神经网络,通过优劣基因重组克服BP神经网络收敛缓慢和原始遗传算法过早收敛的问题,以提高预测精度.针对船舶航艏向在零度附近变动时实际方向变动幅度与数据变化幅度存在较大偏差问题,高天航等人[36 ] 在 BP 神经网络的基础上引入双三角函数变换,在拟合预测后进行反三角函数变换和平均处理,达到了有效降低预测误差的目的. ...
基于 BP神经网络的船舶航迹实时预测
1
2012
... 随着人工神经网络的不断发展,其相关技术已被应用于轨迹预测.在一些简单的预测任务中, BP 神经网络模型可将移动目标的历史轨迹数据输入神经网络中进行训练,以学习目标轨迹的运动特征,进而根据该运动特征对未来轨迹进行预测.徐婷婷等人[32 ] 设计了基于三层 BP 神经网络的航迹预测模型,将航向、航速作为输入,经度差、纬度差作为输出,可实现实时预测.杨淳[33 ] 基于BP神经网络建立了自治式潜水器(autonomous underwater vehicle,AUV)航行轨迹预测模型,该模型以轨迹数据及 AUV 周围的环境要素为训练样本对网络模型进行训练,最终预测出AUV的未来航行轨迹.杨彬等人[34 ] 构建神经网络模型对高超声速飞行器的历史轨迹进行训练,预测其未来航行轨迹.BP神经网络收敛速度过慢,为了提高预测时效性和精准度,马国兵等人[35 ] 利用遗传算法改进BP神经网络,通过优劣基因重组克服BP神经网络收敛缓慢和原始遗传算法过早收敛的问题,以提高预测精度.针对船舶航艏向在零度附近变动时实际方向变动幅度与数据变化幅度存在较大偏差问题,高天航等人[36 ] 在 BP 神经网络的基础上引入双三角函数变换,在拟合预测后进行反三角函数变换和平均处理,达到了有效降低预测误差的目的. ...
基于 BP 神经网络的 AUV 航迹预测方法研究
1
2014
... 随着人工神经网络的不断发展,其相关技术已被应用于轨迹预测.在一些简单的预测任务中, BP 神经网络模型可将移动目标的历史轨迹数据输入神经网络中进行训练,以学习目标轨迹的运动特征,进而根据该运动特征对未来轨迹进行预测.徐婷婷等人[32 ] 设计了基于三层 BP 神经网络的航迹预测模型,将航向、航速作为输入,经度差、纬度差作为输出,可实现实时预测.杨淳[33 ] 基于BP神经网络建立了自治式潜水器(autonomous underwater vehicle,AUV)航行轨迹预测模型,该模型以轨迹数据及 AUV 周围的环境要素为训练样本对网络模型进行训练,最终预测出AUV的未来航行轨迹.杨彬等人[34 ] 构建神经网络模型对高超声速飞行器的历史轨迹进行训练,预测其未来航行轨迹.BP神经网络收敛速度过慢,为了提高预测时效性和精准度,马国兵等人[35 ] 利用遗传算法改进BP神经网络,通过优劣基因重组克服BP神经网络收敛缓慢和原始遗传算法过早收敛的问题,以提高预测精度.针对船舶航艏向在零度附近变动时实际方向变动幅度与数据变化幅度存在较大偏差问题,高天航等人[36 ] 在 BP 神经网络的基础上引入双三角函数变换,在拟合预测后进行反三角函数变换和平均处理,达到了有效降低预测误差的目的. ...
基于 BP 神经网络的 AUV 航迹预测方法研究
1
2014
... 随着人工神经网络的不断发展,其相关技术已被应用于轨迹预测.在一些简单的预测任务中, BP 神经网络模型可将移动目标的历史轨迹数据输入神经网络中进行训练,以学习目标轨迹的运动特征,进而根据该运动特征对未来轨迹进行预测.徐婷婷等人[32 ] 设计了基于三层 BP 神经网络的航迹预测模型,将航向、航速作为输入,经度差、纬度差作为输出,可实现实时预测.杨淳[33 ] 基于BP神经网络建立了自治式潜水器(autonomous underwater vehicle,AUV)航行轨迹预测模型,该模型以轨迹数据及 AUV 周围的环境要素为训练样本对网络模型进行训练,最终预测出AUV的未来航行轨迹.杨彬等人[34 ] 构建神经网络模型对高超声速飞行器的历史轨迹进行训练,预测其未来航行轨迹.BP神经网络收敛速度过慢,为了提高预测时效性和精准度,马国兵等人[35 ] 利用遗传算法改进BP神经网络,通过优劣基因重组克服BP神经网络收敛缓慢和原始遗传算法过早收敛的问题,以提高预测精度.针对船舶航艏向在零度附近变动时实际方向变动幅度与数据变化幅度存在较大偏差问题,高天航等人[36 ] 在 BP 神经网络的基础上引入双三角函数变换,在拟合预测后进行反三角函数变换和平均处理,达到了有效降低预测误差的目的. ...
一种 GRNN 神经网络的高超声速飞行器轨迹预测方法
1
2015
... 随着人工神经网络的不断发展,其相关技术已被应用于轨迹预测.在一些简单的预测任务中, BP 神经网络模型可将移动目标的历史轨迹数据输入神经网络中进行训练,以学习目标轨迹的运动特征,进而根据该运动特征对未来轨迹进行预测.徐婷婷等人[32 ] 设计了基于三层 BP 神经网络的航迹预测模型,将航向、航速作为输入,经度差、纬度差作为输出,可实现实时预测.杨淳[33 ] 基于BP神经网络建立了自治式潜水器(autonomous underwater vehicle,AUV)航行轨迹预测模型,该模型以轨迹数据及 AUV 周围的环境要素为训练样本对网络模型进行训练,最终预测出AUV的未来航行轨迹.杨彬等人[34 ] 构建神经网络模型对高超声速飞行器的历史轨迹进行训练,预测其未来航行轨迹.BP神经网络收敛速度过慢,为了提高预测时效性和精准度,马国兵等人[35 ] 利用遗传算法改进BP神经网络,通过优劣基因重组克服BP神经网络收敛缓慢和原始遗传算法过早收敛的问题,以提高预测精度.针对船舶航艏向在零度附近变动时实际方向变动幅度与数据变化幅度存在较大偏差问题,高天航等人[36 ] 在 BP 神经网络的基础上引入双三角函数变换,在拟合预测后进行反三角函数变换和平均处理,达到了有效降低预测误差的目的. ...
一种 GRNN 神经网络的高超声速飞行器轨迹预测方法
1
2015
... 随着人工神经网络的不断发展,其相关技术已被应用于轨迹预测.在一些简单的预测任务中, BP 神经网络模型可将移动目标的历史轨迹数据输入神经网络中进行训练,以学习目标轨迹的运动特征,进而根据该运动特征对未来轨迹进行预测.徐婷婷等人[32 ] 设计了基于三层 BP 神经网络的航迹预测模型,将航向、航速作为输入,经度差、纬度差作为输出,可实现实时预测.杨淳[33 ] 基于BP神经网络建立了自治式潜水器(autonomous underwater vehicle,AUV)航行轨迹预测模型,该模型以轨迹数据及 AUV 周围的环境要素为训练样本对网络模型进行训练,最终预测出AUV的未来航行轨迹.杨彬等人[34 ] 构建神经网络模型对高超声速飞行器的历史轨迹进行训练,预测其未来航行轨迹.BP神经网络收敛速度过慢,为了提高预测时效性和精准度,马国兵等人[35 ] 利用遗传算法改进BP神经网络,通过优劣基因重组克服BP神经网络收敛缓慢和原始遗传算法过早收敛的问题,以提高预测精度.针对船舶航艏向在零度附近变动时实际方向变动幅度与数据变化幅度存在较大偏差问题,高天航等人[36 ] 在 BP 神经网络的基础上引入双三角函数变换,在拟合预测后进行反三角函数变换和平均处理,达到了有效降低预测误差的目的. ...
一种基于神经网络的机动目标轨迹预测方法
1
2006
... 随着人工神经网络的不断发展,其相关技术已被应用于轨迹预测.在一些简单的预测任务中, BP 神经网络模型可将移动目标的历史轨迹数据输入神经网络中进行训练,以学习目标轨迹的运动特征,进而根据该运动特征对未来轨迹进行预测.徐婷婷等人[32 ] 设计了基于三层 BP 神经网络的航迹预测模型,将航向、航速作为输入,经度差、纬度差作为输出,可实现实时预测.杨淳[33 ] 基于BP神经网络建立了自治式潜水器(autonomous underwater vehicle,AUV)航行轨迹预测模型,该模型以轨迹数据及 AUV 周围的环境要素为训练样本对网络模型进行训练,最终预测出AUV的未来航行轨迹.杨彬等人[34 ] 构建神经网络模型对高超声速飞行器的历史轨迹进行训练,预测其未来航行轨迹.BP神经网络收敛速度过慢,为了提高预测时效性和精准度,马国兵等人[35 ] 利用遗传算法改进BP神经网络,通过优劣基因重组克服BP神经网络收敛缓慢和原始遗传算法过早收敛的问题,以提高预测精度.针对船舶航艏向在零度附近变动时实际方向变动幅度与数据变化幅度存在较大偏差问题,高天航等人[36 ] 在 BP 神经网络的基础上引入双三角函数变换,在拟合预测后进行反三角函数变换和平均处理,达到了有效降低预测误差的目的. ...
一种基于神经网络的机动目标轨迹预测方法
1
2006
... 随着人工神经网络的不断发展,其相关技术已被应用于轨迹预测.在一些简单的预测任务中, BP 神经网络模型可将移动目标的历史轨迹数据输入神经网络中进行训练,以学习目标轨迹的运动特征,进而根据该运动特征对未来轨迹进行预测.徐婷婷等人[32 ] 设计了基于三层 BP 神经网络的航迹预测模型,将航向、航速作为输入,经度差、纬度差作为输出,可实现实时预测.杨淳[33 ] 基于BP神经网络建立了自治式潜水器(autonomous underwater vehicle,AUV)航行轨迹预测模型,该模型以轨迹数据及 AUV 周围的环境要素为训练样本对网络模型进行训练,最终预测出AUV的未来航行轨迹.杨彬等人[34 ] 构建神经网络模型对高超声速飞行器的历史轨迹进行训练,预测其未来航行轨迹.BP神经网络收敛速度过慢,为了提高预测时效性和精准度,马国兵等人[35 ] 利用遗传算法改进BP神经网络,通过优劣基因重组克服BP神经网络收敛缓慢和原始遗传算法过早收敛的问题,以提高预测精度.针对船舶航艏向在零度附近变动时实际方向变动幅度与数据变化幅度存在较大偏差问题,高天航等人[36 ] 在 BP 神经网络的基础上引入双三角函数变换,在拟合预测后进行反三角函数变换和平均处理,达到了有效降低预测误差的目的. ...
考虑航艏向与数据变化差异的船舶轨迹预测
1
2021
... 随着人工神经网络的不断发展,其相关技术已被应用于轨迹预测.在一些简单的预测任务中, BP 神经网络模型可将移动目标的历史轨迹数据输入神经网络中进行训练,以学习目标轨迹的运动特征,进而根据该运动特征对未来轨迹进行预测.徐婷婷等人[32 ] 设计了基于三层 BP 神经网络的航迹预测模型,将航向、航速作为输入,经度差、纬度差作为输出,可实现实时预测.杨淳[33 ] 基于BP神经网络建立了自治式潜水器(autonomous underwater vehicle,AUV)航行轨迹预测模型,该模型以轨迹数据及 AUV 周围的环境要素为训练样本对网络模型进行训练,最终预测出AUV的未来航行轨迹.杨彬等人[34 ] 构建神经网络模型对高超声速飞行器的历史轨迹进行训练,预测其未来航行轨迹.BP神经网络收敛速度过慢,为了提高预测时效性和精准度,马国兵等人[35 ] 利用遗传算法改进BP神经网络,通过优劣基因重组克服BP神经网络收敛缓慢和原始遗传算法过早收敛的问题,以提高预测精度.针对船舶航艏向在零度附近变动时实际方向变动幅度与数据变化幅度存在较大偏差问题,高天航等人[36 ] 在 BP 神经网络的基础上引入双三角函数变换,在拟合预测后进行反三角函数变换和平均处理,达到了有效降低预测误差的目的. ...
考虑航艏向与数据变化差异的船舶轨迹预测
1
2021
... 随着人工神经网络的不断发展,其相关技术已被应用于轨迹预测.在一些简单的预测任务中, BP 神经网络模型可将移动目标的历史轨迹数据输入神经网络中进行训练,以学习目标轨迹的运动特征,进而根据该运动特征对未来轨迹进行预测.徐婷婷等人[32 ] 设计了基于三层 BP 神经网络的航迹预测模型,将航向、航速作为输入,经度差、纬度差作为输出,可实现实时预测.杨淳[33 ] 基于BP神经网络建立了自治式潜水器(autonomous underwater vehicle,AUV)航行轨迹预测模型,该模型以轨迹数据及 AUV 周围的环境要素为训练样本对网络模型进行训练,最终预测出AUV的未来航行轨迹.杨彬等人[34 ] 构建神经网络模型对高超声速飞行器的历史轨迹进行训练,预测其未来航行轨迹.BP神经网络收敛速度过慢,为了提高预测时效性和精准度,马国兵等人[35 ] 利用遗传算法改进BP神经网络,通过优劣基因重组克服BP神经网络收敛缓慢和原始遗传算法过早收敛的问题,以提高预测精度.针对船舶航艏向在零度附近变动时实际方向变动幅度与数据变化幅度存在较大偏差问题,高天航等人[36 ] 在 BP 神经网络的基础上引入双三角函数变换,在拟合预测后进行反三角函数变换和平均处理,达到了有效降低预测误差的目的. ...
基于注意力机制的车辆运动轨迹预测
3
2020
... 在基于神经网络解决复杂非线性的轨迹预测问题时,将目标历史轨迹数据和当前轨迹数据作为输入变量,未来轨迹信息作为输出变量,通过对输入变量与真实值进行训练,建立函数映射关系来预测轨迹[37 ] .为了保证预测精度,训练数据应存在较强的关联性,同时,应选择合适的神经网络结构,以避免过拟合或不收敛等问题. ...
... 循环神经网络(recurrent neural network,RNN)能够捕捉时间特征且具有短时记忆功能,Min K等人
[42 ] 首先基于 RNN 对车辆的障碍物路径进行预测,然后通过预测路径的不确定性预测车辆的轨迹.但在 RNN 预测较长的轨迹数据时,参数选取不当会引起梯度消失或者爆炸,导致预测结果存在较大的误差.长短期记忆(long short-term memory, LSTM)网络在RNN结构的基础上增加了输入门、遗忘门和输出门,实现了对状态信息的筛选,解决了神经网络中长序列依赖等问题.针对地面移动目标,利用LSTM算法能准确预测高速公路上车辆的未来纵向和横向轨迹
[43 ] ,同时可对周边车辆进行远视轨迹预测,有效提高交互式驾驶环境中的预测精度
[44 ] ;海上移动目标特征复杂,LSTM算法可将船舶的特征作为网络的输入实现船舶航行轨迹的动态预测
[15 ] .参考文献[
13 ]和参考文献[
45 ]进一步优化LSTM网络模型,分别提出蚁群优化算法和社会长短期记忆网络来提高预测模型性能
[46 ] .
10.11959/j.issn.2096-6652.202115.F002 图2 基于深度学习的移动目标轨迹预测模型<sup>[<xref ref-type="bibr" rid="b37">37</xref>]</sup> ![]()
极限学习机(extreme learning machine,ELM)具有高效的学习速度和良好的泛化性能.针对不同运动状态下的移动目标轨迹预测问题,ELM可通过自动调节采样周期提高预测精度[47 ] .传统 ELM 算法通过融合深度神经网络可弥补长时预测效果较差的缺陷[48 ] ,生成式对抗网络(generative adversarial network,GAN)能够提升非监督式预测方法的性能.结合 GAN 的轨迹预测方法通过观察行人复杂的历史运动方式,利用池化机制汇总行人信息,预测未来具备可行性的轨迹[49 ] ,Sadeghian A等人[50 ] 结合社会注意力机制和物理注意力,通过GAN预测更准确和具有可解释性的可行路径.基于深度学习的移动目标轨迹预测方法具备较强的学习和适应能力,面对复杂多变的轨迹数据时,不仅可获得高精度的预测结果,还适用于大数据集的预测任务,但该方法存在训练速度慢、内存消耗大、模型参数选取困难等问题. ...
... Bahdanau D 等人[58 ] 于 2014 年提出注意力机制,通过模拟人脑的注意力增大“注意力范围”,提高重要信息的权重,从而达到较好的预测效果.为了准确描述运动学模型中移动目标之间的相互作用,注意力机制通过模拟移动目标之间的交互获取重要特征信息,从而实现准确轨迹预测[59 ] ,针对经典Social-LSTM算法提取特征信息时未考虑车辆差异性的问题,刘创等人[37 ] 在原始卷积池化网络的基础上引入注意力机制,对邻居车辆赋予不同权重,选取重要的邻居车辆信息以提高预测精度.参考文献[60 ]将注意力机制与生成式对抗网络模型结合,在多个数据集上验证了该方法的有效性.李琳辉等人[61 ] 利用注意力模型对行人的社会关系进行建模,提出的基于社会注意力机制的轨迹预测模型如图4 所示.图4 中, x N 1 : t Y ˜ 1 : N 1 : T Y ˜ 1 : N 1 : T Y 1 : N 1 : T
基于注意力机制的车辆运动轨迹预测
3
2020
... 在基于神经网络解决复杂非线性的轨迹预测问题时,将目标历史轨迹数据和当前轨迹数据作为输入变量,未来轨迹信息作为输出变量,通过对输入变量与真实值进行训练,建立函数映射关系来预测轨迹[37 ] .为了保证预测精度,训练数据应存在较强的关联性,同时,应选择合适的神经网络结构,以避免过拟合或不收敛等问题. ...
... 循环神经网络(recurrent neural network,RNN)能够捕捉时间特征且具有短时记忆功能,Min K等人
[42 ] 首先基于 RNN 对车辆的障碍物路径进行预测,然后通过预测路径的不确定性预测车辆的轨迹.但在 RNN 预测较长的轨迹数据时,参数选取不当会引起梯度消失或者爆炸,导致预测结果存在较大的误差.长短期记忆(long short-term memory, LSTM)网络在RNN结构的基础上增加了输入门、遗忘门和输出门,实现了对状态信息的筛选,解决了神经网络中长序列依赖等问题.针对地面移动目标,利用LSTM算法能准确预测高速公路上车辆的未来纵向和横向轨迹
[43 ] ,同时可对周边车辆进行远视轨迹预测,有效提高交互式驾驶环境中的预测精度
[44 ] ;海上移动目标特征复杂,LSTM算法可将船舶的特征作为网络的输入实现船舶航行轨迹的动态预测
[15 ] .参考文献[
13 ]和参考文献[
45 ]进一步优化LSTM网络模型,分别提出蚁群优化算法和社会长短期记忆网络来提高预测模型性能
[46 ] .
10.11959/j.issn.2096-6652.202115.F002 图2 基于深度学习的移动目标轨迹预测模型<sup>[<xref ref-type="bibr" rid="b37">37</xref>]</sup> ![]()
极限学习机(extreme learning machine,ELM)具有高效的学习速度和良好的泛化性能.针对不同运动状态下的移动目标轨迹预测问题,ELM可通过自动调节采样周期提高预测精度[47 ] .传统 ELM 算法通过融合深度神经网络可弥补长时预测效果较差的缺陷[48 ] ,生成式对抗网络(generative adversarial network,GAN)能够提升非监督式预测方法的性能.结合 GAN 的轨迹预测方法通过观察行人复杂的历史运动方式,利用池化机制汇总行人信息,预测未来具备可行性的轨迹[49 ] ,Sadeghian A等人[50 ] 结合社会注意力机制和物理注意力,通过GAN预测更准确和具有可解释性的可行路径.基于深度学习的移动目标轨迹预测方法具备较强的学习和适应能力,面对复杂多变的轨迹数据时,不仅可获得高精度的预测结果,还适用于大数据集的预测任务,但该方法存在训练速度慢、内存消耗大、模型参数选取困难等问题. ...
... Bahdanau D 等人[58 ] 于 2014 年提出注意力机制,通过模拟人脑的注意力增大“注意力范围”,提高重要信息的权重,从而达到较好的预测效果.为了准确描述运动学模型中移动目标之间的相互作用,注意力机制通过模拟移动目标之间的交互获取重要特征信息,从而实现准确轨迹预测[59 ] ,针对经典Social-LSTM算法提取特征信息时未考虑车辆差异性的问题,刘创等人[37 ] 在原始卷积池化网络的基础上引入注意力机制,对邻居车辆赋予不同权重,选取重要的邻居车辆信息以提高预测精度.参考文献[60 ]将注意力机制与生成式对抗网络模型结合,在多个数据集上验证了该方法的有效性.李琳辉等人[61 ] 利用注意力模型对行人的社会关系进行建模,提出的基于社会注意力机制的轨迹预测模型如图4 所示.图4 中, x N 1 : t Y ˜ 1 : N 1 : T Y ˜ 1 : N 1 : T Y 1 : N 1 : T
A traf?c ?ow forecasting model based on BP neural network
1
2009
... 在深度学习中,多层感知机(multi-layer perception,MLP)作为最基本的网络结构被广泛应用,参考文献[38 -39 ]分别利用MLP对车流量和交通流量进行预测[40 ] .Valsamis A等人[41 ] 针对预测时间间隔不相同的问题,提出了基于MLP的预测框架.相比于MLP,堆叠自编码器在预测过程中包括编码和解码两个阶段,能够降低数据维度、提取潜在特征,但潜在干扰信息的存在易导致预测精度不佳[40 ] . ...
Long term estimation of traf?c demand on urban expressway by neural networks
1
2014
... 在深度学习中,多层感知机(multi-layer perception,MLP)作为最基本的网络结构被广泛应用,参考文献[38 -39 ]分别利用MLP对车流量和交通流量进行预测[40 ] .Valsamis A等人[41 ] 针对预测时间间隔不相同的问题,提出了基于MLP的预测框架.相比于MLP,堆叠自编码器在预测过程中包括编码和解码两个阶段,能够降低数据维度、提取潜在特征,但潜在干扰信息的存在易导致预测精度不佳[40 ] . ...
基于深度学习的轨迹预测
3
2019
... 在深度学习中,多层感知机(multi-layer perception,MLP)作为最基本的网络结构被广泛应用,参考文献[38 -39 ]分别利用MLP对车流量和交通流量进行预测[40 ] .Valsamis A等人[41 ] 针对预测时间间隔不相同的问题,提出了基于MLP的预测框架.相比于MLP,堆叠自编码器在预测过程中包括编码和解码两个阶段,能够降低数据维度、提取潜在特征,但潜在干扰信息的存在易导致预测精度不佳[40 ] . ...
... [40 ]. ...
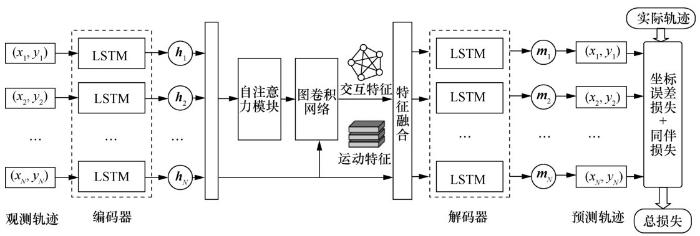
... 基于混合模型的移动目标轨迹预测方法通过融合不同预测方法的优点提高移动目标轨迹预测精度.LSTM-ARIMA等概率统计与深度学习相结合的混合模型能够对具有复杂运动特征的移动目标轨迹进行短期精准的预测[51 ] .Pecher P等人[52 ] 研究了二阶马尔可夫模型和前馈神经网络模型,指出通过增加马尔可夫模型和神经网络的阶数可以提高预测准确性,但是会延长相应的训练时间、提高空间成本.基于两种深度学习的轨迹预测模型有效弥补了单一模型泛化能力不足、精准度较低的缺陷.如CNN和LSTM混合模型[53 ] 、ELM和深度神经网络融合算法[48 ] 、MLP和LSTM混合模型[40 ] 等.如图3所示,周于涛等人[54 ] 使用MLP算法将每个行人i(i=1,2,…,N)的位置坐标(xi , yi )嵌入向量中,通过LSTM网络获得编码后的运动特征向量 h i m i
基于深度学习的轨迹预测
3
2019
... 在深度学习中,多层感知机(multi-layer perception,MLP)作为最基本的网络结构被广泛应用,参考文献[38 -39 ]分别利用MLP对车流量和交通流量进行预测[40 ] .Valsamis A等人[41 ] 针对预测时间间隔不相同的问题,提出了基于MLP的预测框架.相比于MLP,堆叠自编码器在预测过程中包括编码和解码两个阶段,能够降低数据维度、提取潜在特征,但潜在干扰信息的存在易导致预测精度不佳[40 ] . ...
... [40 ]. ...
... 基于混合模型的移动目标轨迹预测方法通过融合不同预测方法的优点提高移动目标轨迹预测精度.LSTM-ARIMA等概率统计与深度学习相结合的混合模型能够对具有复杂运动特征的移动目标轨迹进行短期精准的预测[51 ] .Pecher P等人[52 ] 研究了二阶马尔可夫模型和前馈神经网络模型,指出通过增加马尔可夫模型和神经网络的阶数可以提高预测准确性,但是会延长相应的训练时间、提高空间成本.基于两种深度学习的轨迹预测模型有效弥补了单一模型泛化能力不足、精准度较低的缺陷.如CNN和LSTM混合模型[53 ] 、ELM和深度神经网络融合算法[48 ] 、MLP和LSTM混合模型[40 ] 等.如图3所示,周于涛等人[54 ] 使用MLP算法将每个行人i(i=1,2,…,N)的位置坐标(xi , yi )嵌入向量中,通过LSTM网络获得编码后的运动特征向量 h i m i
Employing traditional machine learning algorithms for big data streams analysis:the case of object trajectory prediction
1
2017
... 在深度学习中,多层感知机(multi-layer perception,MLP)作为最基本的网络结构被广泛应用,参考文献[38 -39 ]分别利用MLP对车流量和交通流量进行预测[40 ] .Valsamis A等人[41 ] 针对预测时间间隔不相同的问题,提出了基于MLP的预测框架.相比于MLP,堆叠自编码器在预测过程中包括编码和解码两个阶段,能够降低数据维度、提取潜在特征,但潜在干扰信息的存在易导致预测精度不佳[40 ] . ...
RNN-based path prediction of obstacle vehicles with deep ensemble
1
2019
... 循环神经网络(recurrent neural network,RNN)能够捕捉时间特征且具有短时记忆功能,Min K等人[42 ] 首先基于 RNN 对车辆的障碍物路径进行预测,然后通过预测路径的不确定性预测车辆的轨迹.但在 RNN 预测较长的轨迹数据时,参数选取不当会引起梯度消失或者爆炸,导致预测结果存在较大的误差.长短期记忆(long short-term memory, LSTM)网络在RNN结构的基础上增加了输入门、遗忘门和输出门,实现了对状态信息的筛选,解决了神经网络中长序列依赖等问题.针对地面移动目标,利用LSTM算法能准确预测高速公路上车辆的未来纵向和横向轨迹[43 ] ,同时可对周边车辆进行远视轨迹预测,有效提高交互式驾驶环境中的预测精度[44 ] ;海上移动目标特征复杂,LSTM算法可将船舶的特征作为网络的输入实现船舶航行轨迹的动态预测[15 ] .参考文献[13 ]和参考文献[45 ]进一步优化LSTM网络模型,分别提出蚁群优化算法和社会长短期记忆网络来提高预测模型性能[46 ] . ...
An LSTM network for highway trajectory prediction
1
2017
... 循环神经网络(recurrent neural network,RNN)能够捕捉时间特征且具有短时记忆功能,Min K等人[42 ] 首先基于 RNN 对车辆的障碍物路径进行预测,然后通过预测路径的不确定性预测车辆的轨迹.但在 RNN 预测较长的轨迹数据时,参数选取不当会引起梯度消失或者爆炸,导致预测结果存在较大的误差.长短期记忆(long short-term memory, LSTM)网络在RNN结构的基础上增加了输入门、遗忘门和输出门,实现了对状态信息的筛选,解决了神经网络中长序列依赖等问题.针对地面移动目标,利用LSTM算法能准确预测高速公路上车辆的未来纵向和横向轨迹[43 ] ,同时可对周边车辆进行远视轨迹预测,有效提高交互式驾驶环境中的预测精度[44 ] ;海上移动目标特征复杂,LSTM算法可将船舶的特征作为网络的输入实现船舶航行轨迹的动态预测[15 ] .参考文献[13 ]和参考文献[45 ]进一步优化LSTM网络模型,分别提出蚁群优化算法和社会长短期记忆网络来提高预测模型性能[46 ] . ...
Intention-aware long horizon trajectory prediction of surrounding vehicles using dual LSTM networks
1
2018
... 循环神经网络(recurrent neural network,RNN)能够捕捉时间特征且具有短时记忆功能,Min K等人[42 ] 首先基于 RNN 对车辆的障碍物路径进行预测,然后通过预测路径的不确定性预测车辆的轨迹.但在 RNN 预测较长的轨迹数据时,参数选取不当会引起梯度消失或者爆炸,导致预测结果存在较大的误差.长短期记忆(long short-term memory, LSTM)网络在RNN结构的基础上增加了输入门、遗忘门和输出门,实现了对状态信息的筛选,解决了神经网络中长序列依赖等问题.针对地面移动目标,利用LSTM算法能准确预测高速公路上车辆的未来纵向和横向轨迹[43 ] ,同时可对周边车辆进行远视轨迹预测,有效提高交互式驾驶环境中的预测精度[44 ] ;海上移动目标特征复杂,LSTM算法可将船舶的特征作为网络的输入实现船舶航行轨迹的动态预测[15 ] .参考文献[13 ]和参考文献[45 ]进一步优化LSTM网络模型,分别提出蚁群优化算法和社会长短期记忆网络来提高预测模型性能[46 ] . ...
Social LSTM:human trajectory prediction in crowded spaces
1
2016
... 循环神经网络(recurrent neural network,RNN)能够捕捉时间特征且具有短时记忆功能,Min K等人[42 ] 首先基于 RNN 对车辆的障碍物路径进行预测,然后通过预测路径的不确定性预测车辆的轨迹.但在 RNN 预测较长的轨迹数据时,参数选取不当会引起梯度消失或者爆炸,导致预测结果存在较大的误差.长短期记忆(long short-term memory, LSTM)网络在RNN结构的基础上增加了输入门、遗忘门和输出门,实现了对状态信息的筛选,解决了神经网络中长序列依赖等问题.针对地面移动目标,利用LSTM算法能准确预测高速公路上车辆的未来纵向和横向轨迹[43 ] ,同时可对周边车辆进行远视轨迹预测,有效提高交互式驾驶环境中的预测精度[44 ] ;海上移动目标特征复杂,LSTM算法可将船舶的特征作为网络的输入实现船舶航行轨迹的动态预测[15 ] .参考文献[13 ]和参考文献[45 ]进一步优化LSTM网络模型,分别提出蚁群优化算法和社会长短期记忆网络来提高预测模型性能[46 ] . ...
轨迹预测技术的现状及发展综述
1
2020
... 循环神经网络(recurrent neural network,RNN)能够捕捉时间特征且具有短时记忆功能,Min K等人[42 ] 首先基于 RNN 对车辆的障碍物路径进行预测,然后通过预测路径的不确定性预测车辆的轨迹.但在 RNN 预测较长的轨迹数据时,参数选取不当会引起梯度消失或者爆炸,导致预测结果存在较大的误差.长短期记忆(long short-term memory, LSTM)网络在RNN结构的基础上增加了输入门、遗忘门和输出门,实现了对状态信息的筛选,解决了神经网络中长序列依赖等问题.针对地面移动目标,利用LSTM算法能准确预测高速公路上车辆的未来纵向和横向轨迹[43 ] ,同时可对周边车辆进行远视轨迹预测,有效提高交互式驾驶环境中的预测精度[44 ] ;海上移动目标特征复杂,LSTM算法可将船舶的特征作为网络的输入实现船舶航行轨迹的动态预测[15 ] .参考文献[13 ]和参考文献[45 ]进一步优化LSTM网络模型,分别提出蚁群优化算法和社会长短期记忆网络来提高预测模型性能[46 ] . ...
轨迹预测技术的现状及发展综述
1
2020
... 循环神经网络(recurrent neural network,RNN)能够捕捉时间特征且具有短时记忆功能,Min K等人[42 ] 首先基于 RNN 对车辆的障碍物路径进行预测,然后通过预测路径的不确定性预测车辆的轨迹.但在 RNN 预测较长的轨迹数据时,参数选取不当会引起梯度消失或者爆炸,导致预测结果存在较大的误差.长短期记忆(long short-term memory, LSTM)网络在RNN结构的基础上增加了输入门、遗忘门和输出门,实现了对状态信息的筛选,解决了神经网络中长序列依赖等问题.针对地面移动目标,利用LSTM算法能准确预测高速公路上车辆的未来纵向和横向轨迹[43 ] ,同时可对周边车辆进行远视轨迹预测,有效提高交互式驾驶环境中的预测精度[44 ] ;海上移动目标特征复杂,LSTM算法可将船舶的特征作为网络的输入实现船舶航行轨迹的动态预测[15 ] .参考文献[13 ]和参考文献[45 ]进一步优化LSTM网络模型,分别提出蚁群优化算法和社会长短期记忆网络来提高预测模型性能[46 ] . ...
基于极限学习机的船舶航行行为预测
1
2019
... 极限学习机(extreme learning machine,ELM)具有高效的学习速度和良好的泛化性能.针对不同运动状态下的移动目标轨迹预测问题,ELM可通过自动调节采样周期提高预测精度[47 ] .传统 ELM 算法通过融合深度神经网络可弥补长时预测效果较差的缺陷[48 ] ,生成式对抗网络(generative adversarial network,GAN)能够提升非监督式预测方法的性能.结合 GAN 的轨迹预测方法通过观察行人复杂的历史运动方式,利用池化机制汇总行人信息,预测未来具备可行性的轨迹[49 ] ,Sadeghian A等人[50 ] 结合社会注意力机制和物理注意力,通过GAN预测更准确和具有可解释性的可行路径.基于深度学习的移动目标轨迹预测方法具备较强的学习和适应能力,面对复杂多变的轨迹数据时,不仅可获得高精度的预测结果,还适用于大数据集的预测任务,但该方法存在训练速度慢、内存消耗大、模型参数选取困难等问题. ...
基于极限学习机的船舶航行行为预测
1
2019
... 极限学习机(extreme learning machine,ELM)具有高效的学习速度和良好的泛化性能.针对不同运动状态下的移动目标轨迹预测问题,ELM可通过自动调节采样周期提高预测精度[47 ] .传统 ELM 算法通过融合深度神经网络可弥补长时预测效果较差的缺陷[48 ] ,生成式对抗网络(generative adversarial network,GAN)能够提升非监督式预测方法的性能.结合 GAN 的轨迹预测方法通过观察行人复杂的历史运动方式,利用池化机制汇总行人信息,预测未来具备可行性的轨迹[49 ] ,Sadeghian A等人[50 ] 结合社会注意力机制和物理注意力,通过GAN预测更准确和具有可解释性的可行路径.基于深度学习的移动目标轨迹预测方法具备较强的学习和适应能力,面对复杂多变的轨迹数据时,不仅可获得高精度的预测结果,还适用于大数据集的预测任务,但该方法存在训练速度慢、内存消耗大、模型参数选取困难等问题. ...
基于改进极限学习机和深度神经网络融合的车辆轨迹长期预测
2
2020
... 极限学习机(extreme learning machine,ELM)具有高效的学习速度和良好的泛化性能.针对不同运动状态下的移动目标轨迹预测问题,ELM可通过自动调节采样周期提高预测精度[47 ] .传统 ELM 算法通过融合深度神经网络可弥补长时预测效果较差的缺陷[48 ] ,生成式对抗网络(generative adversarial network,GAN)能够提升非监督式预测方法的性能.结合 GAN 的轨迹预测方法通过观察行人复杂的历史运动方式,利用池化机制汇总行人信息,预测未来具备可行性的轨迹[49 ] ,Sadeghian A等人[50 ] 结合社会注意力机制和物理注意力,通过GAN预测更准确和具有可解释性的可行路径.基于深度学习的移动目标轨迹预测方法具备较强的学习和适应能力,面对复杂多变的轨迹数据时,不仅可获得高精度的预测结果,还适用于大数据集的预测任务,但该方法存在训练速度慢、内存消耗大、模型参数选取困难等问题. ...
... 基于混合模型的移动目标轨迹预测方法通过融合不同预测方法的优点提高移动目标轨迹预测精度.LSTM-ARIMA等概率统计与深度学习相结合的混合模型能够对具有复杂运动特征的移动目标轨迹进行短期精准的预测[51 ] .Pecher P等人[52 ] 研究了二阶马尔可夫模型和前馈神经网络模型,指出通过增加马尔可夫模型和神经网络的阶数可以提高预测准确性,但是会延长相应的训练时间、提高空间成本.基于两种深度学习的轨迹预测模型有效弥补了单一模型泛化能力不足、精准度较低的缺陷.如CNN和LSTM混合模型[53 ] 、ELM和深度神经网络融合算法[48 ] 、MLP和LSTM混合模型[40 ] 等.如图3所示,周于涛等人[54 ] 使用MLP算法将每个行人i(i=1,2,…,N)的位置坐标(xi , yi )嵌入向量中,通过LSTM网络获得编码后的运动特征向量 h i m i
基于改进极限学习机和深度神经网络融合的车辆轨迹长期预测
2
2020
... 极限学习机(extreme learning machine,ELM)具有高效的学习速度和良好的泛化性能.针对不同运动状态下的移动目标轨迹预测问题,ELM可通过自动调节采样周期提高预测精度[47 ] .传统 ELM 算法通过融合深度神经网络可弥补长时预测效果较差的缺陷[48 ] ,生成式对抗网络(generative adversarial network,GAN)能够提升非监督式预测方法的性能.结合 GAN 的轨迹预测方法通过观察行人复杂的历史运动方式,利用池化机制汇总行人信息,预测未来具备可行性的轨迹[49 ] ,Sadeghian A等人[50 ] 结合社会注意力机制和物理注意力,通过GAN预测更准确和具有可解释性的可行路径.基于深度学习的移动目标轨迹预测方法具备较强的学习和适应能力,面对复杂多变的轨迹数据时,不仅可获得高精度的预测结果,还适用于大数据集的预测任务,但该方法存在训练速度慢、内存消耗大、模型参数选取困难等问题. ...
... 基于混合模型的移动目标轨迹预测方法通过融合不同预测方法的优点提高移动目标轨迹预测精度.LSTM-ARIMA等概率统计与深度学习相结合的混合模型能够对具有复杂运动特征的移动目标轨迹进行短期精准的预测[51 ] .Pecher P等人[52 ] 研究了二阶马尔可夫模型和前馈神经网络模型,指出通过增加马尔可夫模型和神经网络的阶数可以提高预测准确性,但是会延长相应的训练时间、提高空间成本.基于两种深度学习的轨迹预测模型有效弥补了单一模型泛化能力不足、精准度较低的缺陷.如CNN和LSTM混合模型[53 ] 、ELM和深度神经网络融合算法[48 ] 、MLP和LSTM混合模型[40 ] 等.如图3所示,周于涛等人[54 ] 使用MLP算法将每个行人i(i=1,2,…,N)的位置坐标(xi , yi )嵌入向量中,通过LSTM网络获得编码后的运动特征向量 h i m i
Social GAN:socially acceptable trajectories with generative adversarial networks
1
2018
... 极限学习机(extreme learning machine,ELM)具有高效的学习速度和良好的泛化性能.针对不同运动状态下的移动目标轨迹预测问题,ELM可通过自动调节采样周期提高预测精度[47 ] .传统 ELM 算法通过融合深度神经网络可弥补长时预测效果较差的缺陷[48 ] ,生成式对抗网络(generative adversarial network,GAN)能够提升非监督式预测方法的性能.结合 GAN 的轨迹预测方法通过观察行人复杂的历史运动方式,利用池化机制汇总行人信息,预测未来具备可行性的轨迹[49 ] ,Sadeghian A等人[50 ] 结合社会注意力机制和物理注意力,通过GAN预测更准确和具有可解释性的可行路径.基于深度学习的移动目标轨迹预测方法具备较强的学习和适应能力,面对复杂多变的轨迹数据时,不仅可获得高精度的预测结果,还适用于大数据集的预测任务,但该方法存在训练速度慢、内存消耗大、模型参数选取困难等问题. ...
SoPhie:an attentive GAN for predicting paths compliant to social and physical constraints
1
2019
... 极限学习机(extreme learning machine,ELM)具有高效的学习速度和良好的泛化性能.针对不同运动状态下的移动目标轨迹预测问题,ELM可通过自动调节采样周期提高预测精度[47 ] .传统 ELM 算法通过融合深度神经网络可弥补长时预测效果较差的缺陷[48 ] ,生成式对抗网络(generative adversarial network,GAN)能够提升非监督式预测方法的性能.结合 GAN 的轨迹预测方法通过观察行人复杂的历史运动方式,利用池化机制汇总行人信息,预测未来具备可行性的轨迹[49 ] ,Sadeghian A等人[50 ] 结合社会注意力机制和物理注意力,通过GAN预测更准确和具有可解释性的可行路径.基于深度学习的移动目标轨迹预测方法具备较强的学习和适应能力,面对复杂多变的轨迹数据时,不仅可获得高精度的预测结果,还适用于大数据集的预测任务,但该方法存在训练速度慢、内存消耗大、模型参数选取困难等问题. ...
基于 LSTM-ARIMA 模型的短期航班飞行轨迹预测
1
2019
... 基于混合模型的移动目标轨迹预测方法通过融合不同预测方法的优点提高移动目标轨迹预测精度.LSTM-ARIMA等概率统计与深度学习相结合的混合模型能够对具有复杂运动特征的移动目标轨迹进行短期精准的预测[51 ] .Pecher P等人[52 ] 研究了二阶马尔可夫模型和前馈神经网络模型,指出通过增加马尔可夫模型和神经网络的阶数可以提高预测准确性,但是会延长相应的训练时间、提高空间成本.基于两种深度学习的轨迹预测模型有效弥补了单一模型泛化能力不足、精准度较低的缺陷.如CNN和LSTM混合模型[53 ] 、ELM和深度神经网络融合算法[48 ] 、MLP和LSTM混合模型[40 ] 等.如图3所示,周于涛等人[54 ] 使用MLP算法将每个行人i(i=1,2,…,N)的位置坐标(xi , yi )嵌入向量中,通过LSTM网络获得编码后的运动特征向量 h i m i
基于 LSTM-ARIMA 模型的短期航班飞行轨迹预测
1
2019
... 基于混合模型的移动目标轨迹预测方法通过融合不同预测方法的优点提高移动目标轨迹预测精度.LSTM-ARIMA等概率统计与深度学习相结合的混合模型能够对具有复杂运动特征的移动目标轨迹进行短期精准的预测[51 ] .Pecher P等人[52 ] 研究了二阶马尔可夫模型和前馈神经网络模型,指出通过增加马尔可夫模型和神经网络的阶数可以提高预测准确性,但是会延长相应的训练时间、提高空间成本.基于两种深度学习的轨迹预测模型有效弥补了单一模型泛化能力不足、精准度较低的缺陷.如CNN和LSTM混合模型[53 ] 、ELM和深度神经网络融合算法[48 ] 、MLP和LSTM混合模型[40 ] 等.如图3所示,周于涛等人[54 ] 使用MLP算法将每个行人i(i=1,2,…,N)的位置坐标(xi , yi )嵌入向量中,通过LSTM网络获得编码后的运动特征向量 h i m i
Data-driven vehicle trajectory prediction
1
2016
... 基于混合模型的移动目标轨迹预测方法通过融合不同预测方法的优点提高移动目标轨迹预测精度.LSTM-ARIMA等概率统计与深度学习相结合的混合模型能够对具有复杂运动特征的移动目标轨迹进行短期精准的预测[51 ] .Pecher P等人[52 ] 研究了二阶马尔可夫模型和前馈神经网络模型,指出通过增加马尔可夫模型和神经网络的阶数可以提高预测准确性,但是会延长相应的训练时间、提高空间成本.基于两种深度学习的轨迹预测模型有效弥补了单一模型泛化能力不足、精准度较低的缺陷.如CNN和LSTM混合模型[53 ] 、ELM和深度神经网络融合算法[48 ] 、MLP和LSTM混合模型[40 ] 等.如图3所示,周于涛等人[54 ] 使用MLP算法将每个行人i(i=1,2,…,N)的位置坐标(xi , yi )嵌入向量中,通过LSTM网络获得编码后的运动特征向量 h i m i
基于海量出租车轨迹数据的学习与预测
1
2019
... 基于混合模型的移动目标轨迹预测方法通过融合不同预测方法的优点提高移动目标轨迹预测精度.LSTM-ARIMA等概率统计与深度学习相结合的混合模型能够对具有复杂运动特征的移动目标轨迹进行短期精准的预测[51 ] .Pecher P等人[52 ] 研究了二阶马尔可夫模型和前馈神经网络模型,指出通过增加马尔可夫模型和神经网络的阶数可以提高预测准确性,但是会延长相应的训练时间、提高空间成本.基于两种深度学习的轨迹预测模型有效弥补了单一模型泛化能力不足、精准度较低的缺陷.如CNN和LSTM混合模型[53 ] 、ELM和深度神经网络融合算法[48 ] 、MLP和LSTM混合模型[40 ] 等.如图3所示,周于涛等人[54 ] 使用MLP算法将每个行人i(i=1,2,…,N)的位置坐标(xi , yi )嵌入向量中,通过LSTM网络获得编码后的运动特征向量 h i m i
基于海量出租车轨迹数据的学习与预测
1
2019
... 基于混合模型的移动目标轨迹预测方法通过融合不同预测方法的优点提高移动目标轨迹预测精度.LSTM-ARIMA等概率统计与深度学习相结合的混合模型能够对具有复杂运动特征的移动目标轨迹进行短期精准的预测[51 ] .Pecher P等人[52 ] 研究了二阶马尔可夫模型和前馈神经网络模型,指出通过增加马尔可夫模型和神经网络的阶数可以提高预测准确性,但是会延长相应的训练时间、提高空间成本.基于两种深度学习的轨迹预测模型有效弥补了单一模型泛化能力不足、精准度较低的缺陷.如CNN和LSTM混合模型[53 ] 、ELM和深度神经网络融合算法[48 ] 、MLP和LSTM混合模型[40 ] 等.如图3所示,周于涛等人[54 ] 使用MLP算法将每个行人i(i=1,2,…,N)的位置坐标(xi , yi )嵌入向量中,通过LSTM网络获得编码后的运动特征向量 h i m i
结合自注意力机制和结伴行为特征的行人轨迹预测模型
2
2020
... 基于混合模型的移动目标轨迹预测方法通过融合不同预测方法的优点提高移动目标轨迹预测精度.LSTM-ARIMA等概率统计与深度学习相结合的混合模型能够对具有复杂运动特征的移动目标轨迹进行短期精准的预测[51 ] .Pecher P等人[52 ] 研究了二阶马尔可夫模型和前馈神经网络模型,指出通过增加马尔可夫模型和神经网络的阶数可以提高预测准确性,但是会延长相应的训练时间、提高空间成本.基于两种深度学习的轨迹预测模型有效弥补了单一模型泛化能力不足、精准度较低的缺陷.如CNN和LSTM混合模型[53 ] 、ELM和深度神经网络融合算法[48 ] 、MLP和LSTM混合模型[40 ] 等.如图3所示,周于涛等人[54 ] 使用MLP算法将每个行人i(i=1,2,…,N)的位置坐标(xi , yi )嵌入向量中,通过LSTM网络获得编码后的运动特征向量 h i m i
... 动力学模型主要描绘的是移动目标的运动规律,早期的船舶轨迹预测通过数学物理方程对船舶的运动进行建模,考虑所有可能的影响因素(如质量、大小、惯性和质心等),并使用物理定律刻画船舶的运动特征.关克平等人
[55 ] 利用该思想,给出了船舶刚体运动学模型,该模型将船舶视为刚体,利用动能定理对船舶受力后的位置变化进行描述,最终实现对船舶未来运动状态的分析.Houenou A等人
[56 ] 将多项式轨迹规划与模型结合,基于恒定横摆角速度和加速度进行预测,提高了动力学模型长时间预测的精准度.
10.11959/j.issn.2096-6652.202115.F003 图3 结合LSTM和GCN的行人轨迹预测模型架构<sup>[<xref ref-type="bibr" rid="b54">54</xref>]</sup> ![]()
社会力模型以牛顿动力学为基础,由各个力的表达式来体现目标不同的动机和影响,能够真实地描述个体在群体中的运动情况.Helbing D 等人[57 ] 提出了驱动行人运动的社会力模型,用数学计算式表达了行人在复杂环境下的运动过程.在轨迹预测过程中采用社会力模型可以提高预测精度,但社会力模型的实现要依靠大规模仿真,计算量过大会降低预测的时效性. ...
结合自注意力机制和结伴行为特征的行人轨迹预测模型
2
2020
... 基于混合模型的移动目标轨迹预测方法通过融合不同预测方法的优点提高移动目标轨迹预测精度.LSTM-ARIMA等概率统计与深度学习相结合的混合模型能够对具有复杂运动特征的移动目标轨迹进行短期精准的预测[51 ] .Pecher P等人[52 ] 研究了二阶马尔可夫模型和前馈神经网络模型,指出通过增加马尔可夫模型和神经网络的阶数可以提高预测准确性,但是会延长相应的训练时间、提高空间成本.基于两种深度学习的轨迹预测模型有效弥补了单一模型泛化能力不足、精准度较低的缺陷.如CNN和LSTM混合模型[53 ] 、ELM和深度神经网络融合算法[48 ] 、MLP和LSTM混合模型[40 ] 等.如图3所示,周于涛等人[54 ] 使用MLP算法将每个行人i(i=1,2,…,N)的位置坐标(xi , yi )嵌入向量中,通过LSTM网络获得编码后的运动特征向量 h i m i
... 动力学模型主要描绘的是移动目标的运动规律,早期的船舶轨迹预测通过数学物理方程对船舶的运动进行建模,考虑所有可能的影响因素(如质量、大小、惯性和质心等),并使用物理定律刻画船舶的运动特征.关克平等人
[55 ] 利用该思想,给出了船舶刚体运动学模型,该模型将船舶视为刚体,利用动能定理对船舶受力后的位置变化进行描述,最终实现对船舶未来运动状态的分析.Houenou A等人
[56 ] 将多项式轨迹规划与模型结合,基于恒定横摆角速度和加速度进行预测,提高了动力学模型长时间预测的精准度.
10.11959/j.issn.2096-6652.202115.F003 图3 结合LSTM和GCN的行人轨迹预测模型架构<sup>[<xref ref-type="bibr" rid="b54">54</xref>]</sup> ![]()
社会力模型以牛顿动力学为基础,由各个力的表达式来体现目标不同的动机和影响,能够真实地描述个体在群体中的运动情况.Helbing D 等人[57 ] 提出了驱动行人运动的社会力模型,用数学计算式表达了行人在复杂环境下的运动过程.在轨迹预测过程中采用社会力模型可以提高预测精度,但社会力模型的实现要依靠大规模仿真,计算量过大会降低预测的时效性. ...
基于OSG和Bullet的船舶碰撞响应三维仿真
1
2014
... 动力学模型主要描绘的是移动目标的运动规律,早期的船舶轨迹预测通过数学物理方程对船舶的运动进行建模,考虑所有可能的影响因素(如质量、大小、惯性和质心等),并使用物理定律刻画船舶的运动特征.关克平等人[55 ] 利用该思想,给出了船舶刚体运动学模型,该模型将船舶视为刚体,利用动能定理对船舶受力后的位置变化进行描述,最终实现对船舶未来运动状态的分析.Houenou A等人[56 ] 将多项式轨迹规划与模型结合,基于恒定横摆角速度和加速度进行预测,提高了动力学模型长时间预测的精准度. ...
基于OSG和Bullet的船舶碰撞响应三维仿真
1
2014
... 动力学模型主要描绘的是移动目标的运动规律,早期的船舶轨迹预测通过数学物理方程对船舶的运动进行建模,考虑所有可能的影响因素(如质量、大小、惯性和质心等),并使用物理定律刻画船舶的运动特征.关克平等人[55 ] 利用该思想,给出了船舶刚体运动学模型,该模型将船舶视为刚体,利用动能定理对船舶受力后的位置变化进行描述,最终实现对船舶未来运动状态的分析.Houenou A等人[56 ] 将多项式轨迹规划与模型结合,基于恒定横摆角速度和加速度进行预测,提高了动力学模型长时间预测的精准度. ...
Vehicle trajectory prediction based on motion model and maneuver recognition
1
2013
... 动力学模型主要描绘的是移动目标的运动规律,早期的船舶轨迹预测通过数学物理方程对船舶的运动进行建模,考虑所有可能的影响因素(如质量、大小、惯性和质心等),并使用物理定律刻画船舶的运动特征.关克平等人[55 ] 利用该思想,给出了船舶刚体运动学模型,该模型将船舶视为刚体,利用动能定理对船舶受力后的位置变化进行描述,最终实现对船舶未来运动状态的分析.Houenou A等人[56 ] 将多项式轨迹规划与模型结合,基于恒定横摆角速度和加速度进行预测,提高了动力学模型长时间预测的精准度. ...
Social force model for pedestrian dynamics
1
1995
... 社会力模型以牛顿动力学为基础,由各个力的表达式来体现目标不同的动机和影响,能够真实地描述个体在群体中的运动情况.Helbing D 等人[57 ] 提出了驱动行人运动的社会力模型,用数学计算式表达了行人在复杂环境下的运动过程.在轨迹预测过程中采用社会力模型可以提高预测精度,但社会力模型的实现要依靠大规模仿真,计算量过大会降低预测的时效性. ...
Neural machine translation by jointly learning to align and translate
1
... Bahdanau D 等人[58 ] 于 2014 年提出注意力机制,通过模拟人脑的注意力增大“注意力范围”,提高重要信息的权重,从而达到较好的预测效果.为了准确描述运动学模型中移动目标之间的相互作用,注意力机制通过模拟移动目标之间的交互获取重要特征信息,从而实现准确轨迹预测[59 ] ,针对经典Social-LSTM算法提取特征信息时未考虑车辆差异性的问题,刘创等人[37 ] 在原始卷积池化网络的基础上引入注意力机制,对邻居车辆赋予不同权重,选取重要的邻居车辆信息以提高预测精度.参考文献[60 ]将注意力机制与生成式对抗网络模型结合,在多个数据集上验证了该方法的有效性.李琳辉等人[61 ] 利用注意力模型对行人的社会关系进行建模,提出的基于社会注意力机制的轨迹预测模型如图4 所示.图4 中, x N 1 : t Y ˜ 1 : N 1 : T Y ˜ 1 : N 1 : T Y 1 : N 1 : T
行人轨迹预测方法综述
1
2021
... Bahdanau D 等人[58 ] 于 2014 年提出注意力机制,通过模拟人脑的注意力增大“注意力范围”,提高重要信息的权重,从而达到较好的预测效果.为了准确描述运动学模型中移动目标之间的相互作用,注意力机制通过模拟移动目标之间的交互获取重要特征信息,从而实现准确轨迹预测[59 ] ,针对经典Social-LSTM算法提取特征信息时未考虑车辆差异性的问题,刘创等人[37 ] 在原始卷积池化网络的基础上引入注意力机制,对邻居车辆赋予不同权重,选取重要的邻居车辆信息以提高预测精度.参考文献[60 ]将注意力机制与生成式对抗网络模型结合,在多个数据集上验证了该方法的有效性.李琳辉等人[61 ] 利用注意力模型对行人的社会关系进行建模,提出的基于社会注意力机制的轨迹预测模型如图4 所示.图4 中, x N 1 : t Y ˜ 1 : N 1 : T Y ˜ 1 : N 1 : T Y 1 : N 1 : T
行人轨迹预测方法综述
1
2021
... Bahdanau D 等人[58 ] 于 2014 年提出注意力机制,通过模拟人脑的注意力增大“注意力范围”,提高重要信息的权重,从而达到较好的预测效果.为了准确描述运动学模型中移动目标之间的相互作用,注意力机制通过模拟移动目标之间的交互获取重要特征信息,从而实现准确轨迹预测[59 ] ,针对经典Social-LSTM算法提取特征信息时未考虑车辆差异性的问题,刘创等人[37 ] 在原始卷积池化网络的基础上引入注意力机制,对邻居车辆赋予不同权重,选取重要的邻居车辆信息以提高预测精度.参考文献[60 ]将注意力机制与生成式对抗网络模型结合,在多个数据集上验证了该方法的有效性.李琳辉等人[61 ] 利用注意力模型对行人的社会关系进行建模,提出的基于社会注意力机制的轨迹预测模型如图4 所示.图4 中, x N 1 : t Y ˜ 1 : N 1 : T Y ˜ 1 : N 1 : T Y 1 : N 1 : T
基于注意力机制的生成式对抗轨迹预测方法
1
2021
... Bahdanau D 等人[58 ] 于 2014 年提出注意力机制,通过模拟人脑的注意力增大“注意力范围”,提高重要信息的权重,从而达到较好的预测效果.为了准确描述运动学模型中移动目标之间的相互作用,注意力机制通过模拟移动目标之间的交互获取重要特征信息,从而实现准确轨迹预测[59 ] ,针对经典Social-LSTM算法提取特征信息时未考虑车辆差异性的问题,刘创等人[37 ] 在原始卷积池化网络的基础上引入注意力机制,对邻居车辆赋予不同权重,选取重要的邻居车辆信息以提高预测精度.参考文献[60 ]将注意力机制与生成式对抗网络模型结合,在多个数据集上验证了该方法的有效性.李琳辉等人[61 ] 利用注意力模型对行人的社会关系进行建模,提出的基于社会注意力机制的轨迹预测模型如图4 所示.图4 中, x N 1 : t Y ˜ 1 : N 1 : T Y ˜ 1 : N 1 : T Y 1 : N 1 : T
基于注意力机制的生成式对抗轨迹预测方法
1
2021
... Bahdanau D 等人[58 ] 于 2014 年提出注意力机制,通过模拟人脑的注意力增大“注意力范围”,提高重要信息的权重,从而达到较好的预测效果.为了准确描述运动学模型中移动目标之间的相互作用,注意力机制通过模拟移动目标之间的交互获取重要特征信息,从而实现准确轨迹预测[59 ] ,针对经典Social-LSTM算法提取特征信息时未考虑车辆差异性的问题,刘创等人[37 ] 在原始卷积池化网络的基础上引入注意力机制,对邻居车辆赋予不同权重,选取重要的邻居车辆信息以提高预测精度.参考文献[60 ]将注意力机制与生成式对抗网络模型结合,在多个数据集上验证了该方法的有效性.李琳辉等人[61 ] 利用注意力模型对行人的社会关系进行建模,提出的基于社会注意力机制的轨迹预测模型如图4 所示.图4 中, x N 1 : t Y ˜ 1 : N 1 : T Y ˜ 1 : N 1 : T Y 1 : N 1 : T
基于社会注意力机制的行人轨迹预测方法研究
2
2020
... Bahdanau D 等人[58 ] 于 2014 年提出注意力机制,通过模拟人脑的注意力增大“注意力范围”,提高重要信息的权重,从而达到较好的预测效果.为了准确描述运动学模型中移动目标之间的相互作用,注意力机制通过模拟移动目标之间的交互获取重要特征信息,从而实现准确轨迹预测[59 ] ,针对经典Social-LSTM算法提取特征信息时未考虑车辆差异性的问题,刘创等人[37 ] 在原始卷积池化网络的基础上引入注意力机制,对邻居车辆赋予不同权重,选取重要的邻居车辆信息以提高预测精度.参考文献[60 ]将注意力机制与生成式对抗网络模型结合,在多个数据集上验证了该方法的有效性.李琳辉等人[61 ] 利用注意力模型对行人的社会关系进行建模,提出的基于社会注意力机制的轨迹预测模型如图4 所示.图4 中, x N 1 : t Y ˜ 1 : N 1 : T Y ˜ 1 : N 1 : T Y 1 : N 1 : T
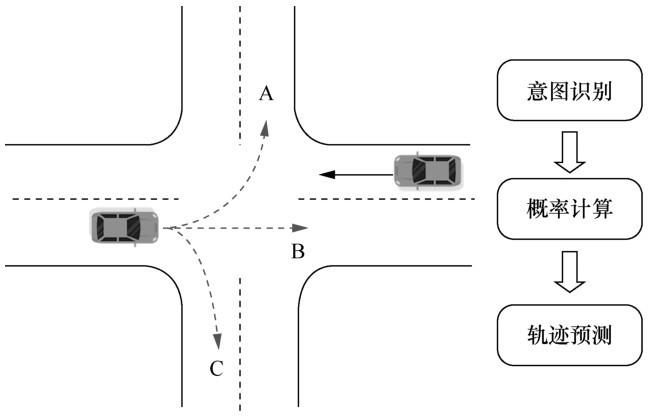
... 基于意图识别的移动目标轨迹预测方法对移动目标的行为意图进行估计,然后再对其轨迹进行预测,大致可分为生成式模型和判别式模型
[62 ] 两种.
图5 描述了基于意图识别的移动目标轨迹预测过程.在生成式模型中,Ding Q Y等人
[13 ] 对车辆驾驶员的意图进行预测,生成了具有可解释性的多模式轨迹.丁洁云等人
[63 ] 在车辆换道的情景下,通过生成的综合决策因子对驾驶意图进行识别,训练HMM,预测车辆换道或直行.He G等人
[64 ] 通过构建动态贝叶斯网络来推断司机执行某种驾驶操作的概率,预测司机的驾驶意图,进一步对车辆的轨迹进行预测.在判别式模型中,移动目标的意图一般采用分类算法进行识别,如HMM和SVM等
[65 ] .季学武等人
[66 ] 在高速公路直线路段先利用 Softmax函数计算出各种驾驶意图的概率,最后采用LSTM预测司机的驾驶意图,显著提高了轨迹预测精度.刘璐
[62 ] 在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹.
10.11959/j.issn.2096-6652.202115.F004 图4 基于社会注意力机制的轨迹预测模型<sup>[<xref ref-type="bibr" rid="b61">61</xref>]</sup> ![]()
10.11959/j.issn.2096-6652.202115.F005 图5 基于意图识别的移动目标轨迹预测过程 ![]()
意图识别和行为预测根据实时采集的目标状态和操作信号来辨识意图和预测下一时间段的行为[67 ] .当前针对一些特定场景,基于意图识别的移动目标轨迹预测方法在短时预测中表现出了较好的效果,但在意图高度不确定的复杂环境下,预测轨迹存在偏差较大的问题. ...
基于社会注意力机制的行人轨迹预测方法研究
2
2020
... Bahdanau D 等人[58 ] 于 2014 年提出注意力机制,通过模拟人脑的注意力增大“注意力范围”,提高重要信息的权重,从而达到较好的预测效果.为了准确描述运动学模型中移动目标之间的相互作用,注意力机制通过模拟移动目标之间的交互获取重要特征信息,从而实现准确轨迹预测[59 ] ,针对经典Social-LSTM算法提取特征信息时未考虑车辆差异性的问题,刘创等人[37 ] 在原始卷积池化网络的基础上引入注意力机制,对邻居车辆赋予不同权重,选取重要的邻居车辆信息以提高预测精度.参考文献[60 ]将注意力机制与生成式对抗网络模型结合,在多个数据集上验证了该方法的有效性.李琳辉等人[61 ] 利用注意力模型对行人的社会关系进行建模,提出的基于社会注意力机制的轨迹预测模型如图4 所示.图4 中, x N 1 : t Y ˜ 1 : N 1 : T Y ˜ 1 : N 1 : T Y 1 : N 1 : T
... 基于意图识别的移动目标轨迹预测方法对移动目标的行为意图进行估计,然后再对其轨迹进行预测,大致可分为生成式模型和判别式模型
[62 ] 两种.
图5 描述了基于意图识别的移动目标轨迹预测过程.在生成式模型中,Ding Q Y等人
[13 ] 对车辆驾驶员的意图进行预测,生成了具有可解释性的多模式轨迹.丁洁云等人
[63 ] 在车辆换道的情景下,通过生成的综合决策因子对驾驶意图进行识别,训练HMM,预测车辆换道或直行.He G等人
[64 ] 通过构建动态贝叶斯网络来推断司机执行某种驾驶操作的概率,预测司机的驾驶意图,进一步对车辆的轨迹进行预测.在判别式模型中,移动目标的意图一般采用分类算法进行识别,如HMM和SVM等
[65 ] .季学武等人
[66 ] 在高速公路直线路段先利用 Softmax函数计算出各种驾驶意图的概率,最后采用LSTM预测司机的驾驶意图,显著提高了轨迹预测精度.刘璐
[62 ] 在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹.
10.11959/j.issn.2096-6652.202115.F004 图4 基于社会注意力机制的轨迹预测模型<sup>[<xref ref-type="bibr" rid="b61">61</xref>]</sup> ![]()
10.11959/j.issn.2096-6652.202115.F005 图5 基于意图识别的移动目标轨迹预测过程 ![]()
意图识别和行为预测根据实时采集的目标状态和操作信号来辨识意图和预测下一时间段的行为[67 ] .当前针对一些特定场景,基于意图识别的移动目标轨迹预测方法在短时预测中表现出了较好的效果,但在意图高度不确定的复杂环境下,预测轨迹存在偏差较大的问题. ...
基于意图识别的骑车人轨迹预测方法研究
2
2019
... 基于意图识别的移动目标轨迹预测方法对移动目标的行为意图进行估计,然后再对其轨迹进行预测,大致可分为生成式模型和判别式模型[62 ] 两种.图5 描述了基于意图识别的移动目标轨迹预测过程.在生成式模型中,Ding Q Y等人[13 ] 对车辆驾驶员的意图进行预测,生成了具有可解释性的多模式轨迹.丁洁云等人[63 ] 在车辆换道的情景下,通过生成的综合决策因子对驾驶意图进行识别,训练HMM,预测车辆换道或直行.He G等人[64 ] 通过构建动态贝叶斯网络来推断司机执行某种驾驶操作的概率,预测司机的驾驶意图,进一步对车辆的轨迹进行预测.在判别式模型中,移动目标的意图一般采用分类算法进行识别,如HMM和SVM等[65 ] .季学武等人[66 ] 在高速公路直线路段先利用 Softmax函数计算出各种驾驶意图的概率,最后采用LSTM预测司机的驾驶意图,显著提高了轨迹预测精度.刘璐[62 ] 在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹. ...
... [62 ]在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹. ...
基于意图识别的骑车人轨迹预测方法研究
2
2019
... 基于意图识别的移动目标轨迹预测方法对移动目标的行为意图进行估计,然后再对其轨迹进行预测,大致可分为生成式模型和判别式模型[62 ] 两种.图5 描述了基于意图识别的移动目标轨迹预测过程.在生成式模型中,Ding Q Y等人[13 ] 对车辆驾驶员的意图进行预测,生成了具有可解释性的多模式轨迹.丁洁云等人[63 ] 在车辆换道的情景下,通过生成的综合决策因子对驾驶意图进行识别,训练HMM,预测车辆换道或直行.He G等人[64 ] 通过构建动态贝叶斯网络来推断司机执行某种驾驶操作的概率,预测司机的驾驶意图,进一步对车辆的轨迹进行预测.在判别式模型中,移动目标的意图一般采用分类算法进行识别,如HMM和SVM等[65 ] .季学武等人[66 ] 在高速公路直线路段先利用 Softmax函数计算出各种驾驶意图的概率,最后采用LSTM预测司机的驾驶意图,显著提高了轨迹预测精度.刘璐[62 ] 在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹. ...
... [62 ]在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹. ...
驾驶人换道决策分析及意图识别算法设计
1
2015
... 基于意图识别的移动目标轨迹预测方法对移动目标的行为意图进行估计,然后再对其轨迹进行预测,大致可分为生成式模型和判别式模型[62 ] 两种.图5 描述了基于意图识别的移动目标轨迹预测过程.在生成式模型中,Ding Q Y等人[13 ] 对车辆驾驶员的意图进行预测,生成了具有可解释性的多模式轨迹.丁洁云等人[63 ] 在车辆换道的情景下,通过生成的综合决策因子对驾驶意图进行识别,训练HMM,预测车辆换道或直行.He G等人[64 ] 通过构建动态贝叶斯网络来推断司机执行某种驾驶操作的概率,预测司机的驾驶意图,进一步对车辆的轨迹进行预测.在判别式模型中,移动目标的意图一般采用分类算法进行识别,如HMM和SVM等[65 ] .季学武等人[66 ] 在高速公路直线路段先利用 Softmax函数计算出各种驾驶意图的概率,最后采用LSTM预测司机的驾驶意图,显著提高了轨迹预测精度.刘璐[62 ] 在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹. ...
驾驶人换道决策分析及意图识别算法设计
1
2015
... 基于意图识别的移动目标轨迹预测方法对移动目标的行为意图进行估计,然后再对其轨迹进行预测,大致可分为生成式模型和判别式模型[62 ] 两种.图5 描述了基于意图识别的移动目标轨迹预测过程.在生成式模型中,Ding Q Y等人[13 ] 对车辆驾驶员的意图进行预测,生成了具有可解释性的多模式轨迹.丁洁云等人[63 ] 在车辆换道的情景下,通过生成的综合决策因子对驾驶意图进行识别,训练HMM,预测车辆换道或直行.He G等人[64 ] 通过构建动态贝叶斯网络来推断司机执行某种驾驶操作的概率,预测司机的驾驶意图,进一步对车辆的轨迹进行预测.在判别式模型中,移动目标的意图一般采用分类算法进行识别,如HMM和SVM等[65 ] .季学武等人[66 ] 在高速公路直线路段先利用 Softmax函数计算出各种驾驶意图的概率,最后采用LSTM预测司机的驾驶意图,显著提高了轨迹预测精度.刘璐[62 ] 在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹. ...
Probabilistic intention prediction and trajectory generation based on dynamic Bayesian networks
1
2019
... 基于意图识别的移动目标轨迹预测方法对移动目标的行为意图进行估计,然后再对其轨迹进行预测,大致可分为生成式模型和判别式模型[62 ] 两种.图5 描述了基于意图识别的移动目标轨迹预测过程.在生成式模型中,Ding Q Y等人[13 ] 对车辆驾驶员的意图进行预测,生成了具有可解释性的多模式轨迹.丁洁云等人[63 ] 在车辆换道的情景下,通过生成的综合决策因子对驾驶意图进行识别,训练HMM,预测车辆换道或直行.He G等人[64 ] 通过构建动态贝叶斯网络来推断司机执行某种驾驶操作的概率,预测司机的驾驶意图,进一步对车辆的轨迹进行预测.在判别式模型中,移动目标的意图一般采用分类算法进行识别,如HMM和SVM等[65 ] .季学武等人[66 ] 在高速公路直线路段先利用 Softmax函数计算出各种驾驶意图的概率,最后采用LSTM预测司机的驾驶意图,显著提高了轨迹预测精度.刘璐[62 ] 在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹. ...
基于HMM和SVM级联算法的驾驶意图识别
1
2018
... 基于意图识别的移动目标轨迹预测方法对移动目标的行为意图进行估计,然后再对其轨迹进行预测,大致可分为生成式模型和判别式模型[62 ] 两种.图5 描述了基于意图识别的移动目标轨迹预测过程.在生成式模型中,Ding Q Y等人[13 ] 对车辆驾驶员的意图进行预测,生成了具有可解释性的多模式轨迹.丁洁云等人[63 ] 在车辆换道的情景下,通过生成的综合决策因子对驾驶意图进行识别,训练HMM,预测车辆换道或直行.He G等人[64 ] 通过构建动态贝叶斯网络来推断司机执行某种驾驶操作的概率,预测司机的驾驶意图,进一步对车辆的轨迹进行预测.在判别式模型中,移动目标的意图一般采用分类算法进行识别,如HMM和SVM等[65 ] .季学武等人[66 ] 在高速公路直线路段先利用 Softmax函数计算出各种驾驶意图的概率,最后采用LSTM预测司机的驾驶意图,显著提高了轨迹预测精度.刘璐[62 ] 在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹. ...
基于HMM和SVM级联算法的驾驶意图识别
1
2018
... 基于意图识别的移动目标轨迹预测方法对移动目标的行为意图进行估计,然后再对其轨迹进行预测,大致可分为生成式模型和判别式模型[62 ] 两种.图5 描述了基于意图识别的移动目标轨迹预测过程.在生成式模型中,Ding Q Y等人[13 ] 对车辆驾驶员的意图进行预测,生成了具有可解释性的多模式轨迹.丁洁云等人[63 ] 在车辆换道的情景下,通过生成的综合决策因子对驾驶意图进行识别,训练HMM,预测车辆换道或直行.He G等人[64 ] 通过构建动态贝叶斯网络来推断司机执行某种驾驶操作的概率,预测司机的驾驶意图,进一步对车辆的轨迹进行预测.在判别式模型中,移动目标的意图一般采用分类算法进行识别,如HMM和SVM等[65 ] .季学武等人[66 ] 在高速公路直线路段先利用 Softmax函数计算出各种驾驶意图的概率,最后采用LSTM预测司机的驾驶意图,显著提高了轨迹预测精度.刘璐[62 ] 在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹. ...
基于 LSTM 网络的驾驶意图识别及车辆轨迹预测
1
2019
... 基于意图识别的移动目标轨迹预测方法对移动目标的行为意图进行估计,然后再对其轨迹进行预测,大致可分为生成式模型和判别式模型[62 ] 两种.图5 描述了基于意图识别的移动目标轨迹预测过程.在生成式模型中,Ding Q Y等人[13 ] 对车辆驾驶员的意图进行预测,生成了具有可解释性的多模式轨迹.丁洁云等人[63 ] 在车辆换道的情景下,通过生成的综合决策因子对驾驶意图进行识别,训练HMM,预测车辆换道或直行.He G等人[64 ] 通过构建动态贝叶斯网络来推断司机执行某种驾驶操作的概率,预测司机的驾驶意图,进一步对车辆的轨迹进行预测.在判别式模型中,移动目标的意图一般采用分类算法进行识别,如HMM和SVM等[65 ] .季学武等人[66 ] 在高速公路直线路段先利用 Softmax函数计算出各种驾驶意图的概率,最后采用LSTM预测司机的驾驶意图,显著提高了轨迹预测精度.刘璐[62 ] 在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹. ...
基于 LSTM 网络的驾驶意图识别及车辆轨迹预测
1
2019
... 基于意图识别的移动目标轨迹预测方法对移动目标的行为意图进行估计,然后再对其轨迹进行预测,大致可分为生成式模型和判别式模型[62 ] 两种.图5 描述了基于意图识别的移动目标轨迹预测过程.在生成式模型中,Ding Q Y等人[13 ] 对车辆驾驶员的意图进行预测,生成了具有可解释性的多模式轨迹.丁洁云等人[63 ] 在车辆换道的情景下,通过生成的综合决策因子对驾驶意图进行识别,训练HMM,预测车辆换道或直行.He G等人[64 ] 通过构建动态贝叶斯网络来推断司机执行某种驾驶操作的概率,预测司机的驾驶意图,进一步对车辆的轨迹进行预测.在判别式模型中,移动目标的意图一般采用分类算法进行识别,如HMM和SVM等[65 ] .季学武等人[66 ] 在高速公路直线路段先利用 Softmax函数计算出各种驾驶意图的概率,最后采用LSTM预测司机的驾驶意图,显著提高了轨迹预测精度.刘璐[62 ] 在十字路口场景下,对骑车人运动模型中相关的多元特征进行分类,基于动态贝叶斯网络推断骑车人的意图,结合交通环境预测未来运动轨迹. ...
基于隐形马尔可夫模型的驾驶员意图辨识方法研究
1
2011
... 意图识别和行为预测根据实时采集的目标状态和操作信号来辨识意图和预测下一时间段的行为[67 ] .当前针对一些特定场景,基于意图识别的移动目标轨迹预测方法在短时预测中表现出了较好的效果,但在意图高度不确定的复杂环境下,预测轨迹存在偏差较大的问题. ...
基于隐形马尔可夫模型的驾驶员意图辨识方法研究
1
2011
... 意图识别和行为预测根据实时采集的目标状态和操作信号来辨识意图和预测下一时间段的行为[67 ] .当前针对一些特定场景,基于意图识别的移动目标轨迹预测方法在短时预测中表现出了较好的效果,但在意图高度不确定的复杂环境下,预测轨迹存在偏差较大的问题. ...
城市道路交通系统的分布式优化控制策略研究
1
2019
... 移动目标轨迹预测可被应用到轨迹重建中,在现实交通行为中,移动目标终端每隔一段时间提供其所处的位置信息,但位置信息存在丢失和错误的问题,往往不能满足交通监管部门的需要,为交通安全保障带来了负面影响.针对连续轨迹的数据缺失问题,通过轨迹预测进行重建,可较好地提升轨迹数据的精确度和完整性,便于交管部门更直观、准确地分析目标移动状态,实现交通管控[68 ] . ...
城市道路交通系统的分布式优化控制策略研究
1
2019
... 移动目标轨迹预测可被应用到轨迹重建中,在现实交通行为中,移动目标终端每隔一段时间提供其所处的位置信息,但位置信息存在丢失和错误的问题,往往不能满足交通监管部门的需要,为交通安全保障带来了负面影响.针对连续轨迹的数据缺失问题,通过轨迹预测进行重建,可较好地提升轨迹数据的精确度和完整性,便于交管部门更直观、准确地分析目标移动状态,实现交通管控[68 ] . ...
AIS-based vessel trajectory reconstruction with U-Net convolutional networks
1
2020
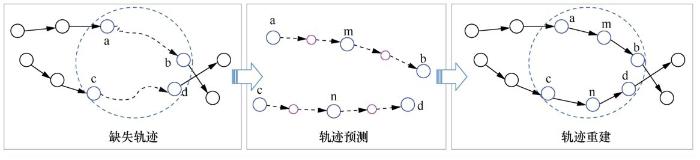
... 船舶缺失轨迹的重建如图6 所示,其中a、b、c、d为原始轨迹点,m、n为缺失轨迹的预测轨迹点.Li S C等人[69 ] 利用船舶AIS历史轨迹,对原始目标轨迹进行网格化处理,使用 U-Net 神经网络提取轨迹特征并重建,通过与三次样条插值等传统轨迹重建方法对比,证明了该方法对不同采样率、缺失点和噪声数据的轨迹具有鲁棒性.Chen X Q等人[70 ] 结合数据预处理模块和预测模块,使用人工神经网络预测了船舶轨迹并进行轨迹重建,获得了准确的船舶轨迹,提升了海上交通管制能力.在实际应用中,由于场景的复杂多变和数据设备的局限性,移动目标轨迹数据往往具有存在噪声或数据缺失的问题,目标轨迹的重建对依赖于高精度数据进行风险管控和数据分析的交通管理部门具有重要意义. ...
Ship trajectory reconstruction from AIS sensory data via data quality control and prediction
1
2020
... 船舶缺失轨迹的重建如图6 所示,其中a、b、c、d为原始轨迹点,m、n为缺失轨迹的预测轨迹点.Li S C等人[69 ] 利用船舶AIS历史轨迹,对原始目标轨迹进行网格化处理,使用 U-Net 神经网络提取轨迹特征并重建,通过与三次样条插值等传统轨迹重建方法对比,证明了该方法对不同采样率、缺失点和噪声数据的轨迹具有鲁棒性.Chen X Q等人[70 ] 结合数据预处理模块和预测模块,使用人工神经网络预测了船舶轨迹并进行轨迹重建,获得了准确的船舶轨迹,提升了海上交通管制能力.在实际应用中,由于场景的复杂多变和数据设备的局限性,移动目标轨迹数据往往具有存在噪声或数据缺失的问题,目标轨迹的重建对依赖于高精度数据进行风险管控和数据分析的交通管理部门具有重要意义. ...
Associative learning of vessel motion patterns for maritime situation awareness
1
2006
... 基于轨迹分析的目标异常行为识别一般通过大量历史轨迹数据学习移动目标的行为特征,建立正常模式下的轨迹路线和行为模式,通过轨迹预测分析预测位置和真实位置,对隐藏在正常行为模式中的异常行为进行识别[71 ,72 ,73 ] .传统轨迹预测方法结合轨迹相似度描述、轨迹聚类算法可实现对异常行为轨迹的高效提取[2 ] ,基于DBSCAN聚类算法挖掘船舶历史轨迹图谱,并将其作为判定异常行为的标准,然后利用卡尔曼滤波对船舶航行轨迹进行预测,检测异常行为并在电子海图中实时预警,实现海上异常船舶智能监管[74 ] .Zhao L B 等人[75 ] 将DBSCAN 聚类结果作为交通模型训练由 LSTM 单元组成的循环神经网络,将循环神经网络作为船舶轨迹预测器进行实时海事异常检测.目前轨迹预测方法大多通过历史轨迹、相似轨迹建立模型,对未来轨迹进行检索和识别,但由于缺少突发性事件的历史轨迹数据,制约了轨迹预测对异常行为识别的准确度. ...
Probabilistic associative learning of vessel motion patterns at multiple spatial scales for maritime situation awareness
1
2007
... 基于轨迹分析的目标异常行为识别一般通过大量历史轨迹数据学习移动目标的行为特征,建立正常模式下的轨迹路线和行为模式,通过轨迹预测分析预测位置和真实位置,对隐藏在正常行为模式中的异常行为进行识别[71 ,72 ,73 ] .传统轨迹预测方法结合轨迹相似度描述、轨迹聚类算法可实现对异常行为轨迹的高效提取[2 ] ,基于DBSCAN聚类算法挖掘船舶历史轨迹图谱,并将其作为判定异常行为的标准,然后利用卡尔曼滤波对船舶航行轨迹进行预测,检测异常行为并在电子海图中实时预警,实现海上异常船舶智能监管[74 ] .Zhao L B 等人[75 ] 将DBSCAN 聚类结果作为交通模型训练由 LSTM 单元组成的循环神经网络,将循环神经网络作为船舶轨迹预测器进行实时海事异常检测.目前轨迹预测方法大多通过历史轨迹、相似轨迹建立模型,对未来轨迹进行检索和识别,但由于缺少突发性事件的历史轨迹数据,制约了轨迹预测对异常行为识别的准确度. ...
Guidance and control of ocean vehicles
1
1994
... 基于轨迹分析的目标异常行为识别一般通过大量历史轨迹数据学习移动目标的行为特征,建立正常模式下的轨迹路线和行为模式,通过轨迹预测分析预测位置和真实位置,对隐藏在正常行为模式中的异常行为进行识别[71 ,72 ,73 ] .传统轨迹预测方法结合轨迹相似度描述、轨迹聚类算法可实现对异常行为轨迹的高效提取[2 ] ,基于DBSCAN聚类算法挖掘船舶历史轨迹图谱,并将其作为判定异常行为的标准,然后利用卡尔曼滤波对船舶航行轨迹进行预测,检测异常行为并在电子海图中实时预警,实现海上异常船舶智能监管[74 ] .Zhao L B 等人[75 ] 将DBSCAN 聚类结果作为交通模型训练由 LSTM 单元组成的循环神经网络,将循环神经网络作为船舶轨迹预测器进行实时海事异常检测.目前轨迹预测方法大多通过历史轨迹、相似轨迹建立模型,对未来轨迹进行检索和识别,但由于缺少突发性事件的历史轨迹数据,制约了轨迹预测对异常行为识别的准确度. ...
船舶异常行为研究进展及发展趋势
1
2017
... 基于轨迹分析的目标异常行为识别一般通过大量历史轨迹数据学习移动目标的行为特征,建立正常模式下的轨迹路线和行为模式,通过轨迹预测分析预测位置和真实位置,对隐藏在正常行为模式中的异常行为进行识别[71 ,72 ,73 ] .传统轨迹预测方法结合轨迹相似度描述、轨迹聚类算法可实现对异常行为轨迹的高效提取[2 ] ,基于DBSCAN聚类算法挖掘船舶历史轨迹图谱,并将其作为判定异常行为的标准,然后利用卡尔曼滤波对船舶航行轨迹进行预测,检测异常行为并在电子海图中实时预警,实现海上异常船舶智能监管[74 ] .Zhao L B 等人[75 ] 将DBSCAN 聚类结果作为交通模型训练由 LSTM 单元组成的循环神经网络,将循环神经网络作为船舶轨迹预测器进行实时海事异常检测.目前轨迹预测方法大多通过历史轨迹、相似轨迹建立模型,对未来轨迹进行检索和识别,但由于缺少突发性事件的历史轨迹数据,制约了轨迹预测对异常行为识别的准确度. ...
船舶异常行为研究进展及发展趋势
1
2017
... 基于轨迹分析的目标异常行为识别一般通过大量历史轨迹数据学习移动目标的行为特征,建立正常模式下的轨迹路线和行为模式,通过轨迹预测分析预测位置和真实位置,对隐藏在正常行为模式中的异常行为进行识别[71 ,72 ,73 ] .传统轨迹预测方法结合轨迹相似度描述、轨迹聚类算法可实现对异常行为轨迹的高效提取[2 ] ,基于DBSCAN聚类算法挖掘船舶历史轨迹图谱,并将其作为判定异常行为的标准,然后利用卡尔曼滤波对船舶航行轨迹进行预测,检测异常行为并在电子海图中实时预警,实现海上异常船舶智能监管[74 ] .Zhao L B 等人[75 ] 将DBSCAN 聚类结果作为交通模型训练由 LSTM 单元组成的循环神经网络,将循环神经网络作为船舶轨迹预测器进行实时海事异常检测.目前轨迹预测方法大多通过历史轨迹、相似轨迹建立模型,对未来轨迹进行检索和识别,但由于缺少突发性事件的历史轨迹数据,制约了轨迹预测对异常行为识别的准确度. ...
Maritime anomaly detection using density-based clustering and recurrent neural network
1
2019
... 基于轨迹分析的目标异常行为识别一般通过大量历史轨迹数据学习移动目标的行为特征,建立正常模式下的轨迹路线和行为模式,通过轨迹预测分析预测位置和真实位置,对隐藏在正常行为模式中的异常行为进行识别[71 ,72 ,73 ] .传统轨迹预测方法结合轨迹相似度描述、轨迹聚类算法可实现对异常行为轨迹的高效提取[2 ] ,基于DBSCAN聚类算法挖掘船舶历史轨迹图谱,并将其作为判定异常行为的标准,然后利用卡尔曼滤波对船舶航行轨迹进行预测,检测异常行为并在电子海图中实时预警,实现海上异常船舶智能监管[74 ] .Zhao L B 等人[75 ] 将DBSCAN 聚类结果作为交通模型训练由 LSTM 单元组成的循环神经网络,将循环神经网络作为船舶轨迹预测器进行实时海事异常检测.目前轨迹预测方法大多通过历史轨迹、相似轨迹建立模型,对未来轨迹进行检索和识别,但由于缺少突发性事件的历史轨迹数据,制约了轨迹预测对异常行为识别的准确度. ...
车辆导航动态路径规划的研究进展
1
2010
... 导航路径规划是智能交通的重要组成部分,目前,成熟的导航系统大多基于静态的路径规划,而实际的交通状况复杂多变,充满了不确定因素,静态的路径规划不能满足用户需求,因此,动态导航路径规划成为研究的热点问题.动态导航路径规划基于历史和最新的交通数据对当前环境下移动目标的轨迹进行预测,并及时调整和更新最佳路线,从而有效减少交通阻塞和交通事故[76 ] . ...
车辆导航动态路径规划的研究进展
1
2010
... 导航路径规划是智能交通的重要组成部分,目前,成熟的导航系统大多基于静态的路径规划,而实际的交通状况复杂多变,充满了不确定因素,静态的路径规划不能满足用户需求,因此,动态导航路径规划成为研究的热点问题.动态导航路径规划基于历史和最新的交通数据对当前环境下移动目标的轨迹进行预测,并及时调整和更新最佳路线,从而有效减少交通阻塞和交通事故[76 ] . ...
Traffic estimation and prediction based on real time floating car data
1
2008
... 参考文献[77 ]利用 ARIMA 模型对城市路网的路段轨迹进行预测,较好地模拟了路段轨迹密度的变化,能做出最短时间的路径规划,但是 ARIMA模型预测很难反映交通状况的非线性,无法克服不确定性对轨迹的影响.针对此问题,许涛[78 ] 基于海量出租车轨迹数据,采用 BP 神经网络对路程时间进行预测,有效节省了交通时间.范静宏[79 ] 针对船舶轨迹导航和预测问题,使用卡尔曼滤波实现船舶航迹的预测和导航,降低了海事监管部门的压力.应文健[80 ] 融合多源信息实现自主车前方车体的行为预测,准确定位并实时预测前车驾驶趋势,有效提升了行车的安全可靠性.基于目标轨迹预测可实现个性化导航,Dai J 等人[81 ] 采用混合高斯分布建模分析用户行为,利用历史轨迹数据预测用户偏好,个性化规划导航.基于历史轨迹数据和实时的交通信息进行预测,可以安排最优路径,有效节省时间并缓解交通拥堵[82 ] ,但是目前偏向于对单个目标进行路径引导,在实际应用中更符合需求的总体协调规划研究还处于起步阶段[83 ] . ...
基于海量出租车轨迹数据的旅行时间预测
1
2017
... 参考文献[77 ]利用 ARIMA 模型对城市路网的路段轨迹进行预测,较好地模拟了路段轨迹密度的变化,能做出最短时间的路径规划,但是 ARIMA模型预测很难反映交通状况的非线性,无法克服不确定性对轨迹的影响.针对此问题,许涛[78 ] 基于海量出租车轨迹数据,采用 BP 神经网络对路程时间进行预测,有效节省了交通时间.范静宏[79 ] 针对船舶轨迹导航和预测问题,使用卡尔曼滤波实现船舶航迹的预测和导航,降低了海事监管部门的压力.应文健[80 ] 融合多源信息实现自主车前方车体的行为预测,准确定位并实时预测前车驾驶趋势,有效提升了行车的安全可靠性.基于目标轨迹预测可实现个性化导航,Dai J 等人[81 ] 采用混合高斯分布建模分析用户行为,利用历史轨迹数据预测用户偏好,个性化规划导航.基于历史轨迹数据和实时的交通信息进行预测,可以安排最优路径,有效节省时间并缓解交通拥堵[82 ] ,但是目前偏向于对单个目标进行路径引导,在实际应用中更符合需求的总体协调规划研究还处于起步阶段[83 ] . ...
基于海量出租车轨迹数据的旅行时间预测
1
2017
... 参考文献[77 ]利用 ARIMA 模型对城市路网的路段轨迹进行预测,较好地模拟了路段轨迹密度的变化,能做出最短时间的路径规划,但是 ARIMA模型预测很难反映交通状况的非线性,无法克服不确定性对轨迹的影响.针对此问题,许涛[78 ] 基于海量出租车轨迹数据,采用 BP 神经网络对路程时间进行预测,有效节省了交通时间.范静宏[79 ] 针对船舶轨迹导航和预测问题,使用卡尔曼滤波实现船舶航迹的预测和导航,降低了海事监管部门的压力.应文健[80 ] 融合多源信息实现自主车前方车体的行为预测,准确定位并实时预测前车驾驶趋势,有效提升了行车的安全可靠性.基于目标轨迹预测可实现个性化导航,Dai J 等人[81 ] 采用混合高斯分布建模分析用户行为,利用历史轨迹数据预测用户偏好,个性化规划导航.基于历史轨迹数据和实时的交通信息进行预测,可以安排最优路径,有效节省时间并缓解交通拥堵[82 ] ,但是目前偏向于对单个目标进行路径引导,在实际应用中更符合需求的总体协调规划研究还处于起步阶段[83 ] . ...
基于大数据技术的船舶定位导航和航迹预测
1
2018
... 参考文献[77 ]利用 ARIMA 模型对城市路网的路段轨迹进行预测,较好地模拟了路段轨迹密度的变化,能做出最短时间的路径规划,但是 ARIMA模型预测很难反映交通状况的非线性,无法克服不确定性对轨迹的影响.针对此问题,许涛[78 ] 基于海量出租车轨迹数据,采用 BP 神经网络对路程时间进行预测,有效节省了交通时间.范静宏[79 ] 针对船舶轨迹导航和预测问题,使用卡尔曼滤波实现船舶航迹的预测和导航,降低了海事监管部门的压力.应文健[80 ] 融合多源信息实现自主车前方车体的行为预测,准确定位并实时预测前车驾驶趋势,有效提升了行车的安全可靠性.基于目标轨迹预测可实现个性化导航,Dai J 等人[81 ] 采用混合高斯分布建模分析用户行为,利用历史轨迹数据预测用户偏好,个性化规划导航.基于历史轨迹数据和实时的交通信息进行预测,可以安排最优路径,有效节省时间并缓解交通拥堵[82 ] ,但是目前偏向于对单个目标进行路径引导,在实际应用中更符合需求的总体协调规划研究还处于起步阶段[83 ] . ...
基于大数据技术的船舶定位导航和航迹预测
1
2018
... 参考文献[77 ]利用 ARIMA 模型对城市路网的路段轨迹进行预测,较好地模拟了路段轨迹密度的变化,能做出最短时间的路径规划,但是 ARIMA模型预测很难反映交通状况的非线性,无法克服不确定性对轨迹的影响.针对此问题,许涛[78 ] 基于海量出租车轨迹数据,采用 BP 神经网络对路程时间进行预测,有效节省了交通时间.范静宏[79 ] 针对船舶轨迹导航和预测问题,使用卡尔曼滤波实现船舶航迹的预测和导航,降低了海事监管部门的压力.应文健[80 ] 融合多源信息实现自主车前方车体的行为预测,准确定位并实时预测前车驾驶趋势,有效提升了行车的安全可靠性.基于目标轨迹预测可实现个性化导航,Dai J 等人[81 ] 采用混合高斯分布建模分析用户行为,利用历史轨迹数据预测用户偏好,个性化规划导航.基于历史轨迹数据和实时的交通信息进行预测,可以安排最优路径,有效节省时间并缓解交通拥堵[82 ] ,但是目前偏向于对单个目标进行路径引导,在实际应用中更符合需求的总体协调规划研究还处于起步阶段[83 ] . ...
自主车导航中提高目标行为预测能力的新方法
1
2012
... 参考文献[77 ]利用 ARIMA 模型对城市路网的路段轨迹进行预测,较好地模拟了路段轨迹密度的变化,能做出最短时间的路径规划,但是 ARIMA模型预测很难反映交通状况的非线性,无法克服不确定性对轨迹的影响.针对此问题,许涛[78 ] 基于海量出租车轨迹数据,采用 BP 神经网络对路程时间进行预测,有效节省了交通时间.范静宏[79 ] 针对船舶轨迹导航和预测问题,使用卡尔曼滤波实现船舶航迹的预测和导航,降低了海事监管部门的压力.应文健[80 ] 融合多源信息实现自主车前方车体的行为预测,准确定位并实时预测前车驾驶趋势,有效提升了行车的安全可靠性.基于目标轨迹预测可实现个性化导航,Dai J 等人[81 ] 采用混合高斯分布建模分析用户行为,利用历史轨迹数据预测用户偏好,个性化规划导航.基于历史轨迹数据和实时的交通信息进行预测,可以安排最优路径,有效节省时间并缓解交通拥堵[82 ] ,但是目前偏向于对单个目标进行路径引导,在实际应用中更符合需求的总体协调规划研究还处于起步阶段[83 ] . ...
自主车导航中提高目标行为预测能力的新方法
1
2012
... 参考文献[77 ]利用 ARIMA 模型对城市路网的路段轨迹进行预测,较好地模拟了路段轨迹密度的变化,能做出最短时间的路径规划,但是 ARIMA模型预测很难反映交通状况的非线性,无法克服不确定性对轨迹的影响.针对此问题,许涛[78 ] 基于海量出租车轨迹数据,采用 BP 神经网络对路程时间进行预测,有效节省了交通时间.范静宏[79 ] 针对船舶轨迹导航和预测问题,使用卡尔曼滤波实现船舶航迹的预测和导航,降低了海事监管部门的压力.应文健[80 ] 融合多源信息实现自主车前方车体的行为预测,准确定位并实时预测前车驾驶趋势,有效提升了行车的安全可靠性.基于目标轨迹预测可实现个性化导航,Dai J 等人[81 ] 采用混合高斯分布建模分析用户行为,利用历史轨迹数据预测用户偏好,个性化规划导航.基于历史轨迹数据和实时的交通信息进行预测,可以安排最优路径,有效节省时间并缓解交通拥堵[82 ] ,但是目前偏向于对单个目标进行路径引导,在实际应用中更符合需求的总体协调规划研究还处于起步阶段[83 ] . ...
Personalized route recommendation using big trajectory data
1
2015
... 参考文献[77 ]利用 ARIMA 模型对城市路网的路段轨迹进行预测,较好地模拟了路段轨迹密度的变化,能做出最短时间的路径规划,但是 ARIMA模型预测很难反映交通状况的非线性,无法克服不确定性对轨迹的影响.针对此问题,许涛[78 ] 基于海量出租车轨迹数据,采用 BP 神经网络对路程时间进行预测,有效节省了交通时间.范静宏[79 ] 针对船舶轨迹导航和预测问题,使用卡尔曼滤波实现船舶航迹的预测和导航,降低了海事监管部门的压力.应文健[80 ] 融合多源信息实现自主车前方车体的行为预测,准确定位并实时预测前车驾驶趋势,有效提升了行车的安全可靠性.基于目标轨迹预测可实现个性化导航,Dai J 等人[81 ] 采用混合高斯分布建模分析用户行为,利用历史轨迹数据预测用户偏好,个性化规划导航.基于历史轨迹数据和实时的交通信息进行预测,可以安排最优路径,有效节省时间并缓解交通拥堵[82 ] ,但是目前偏向于对单个目标进行路径引导,在实际应用中更符合需求的总体协调规划研究还处于起步阶段[83 ] . ...
基于轨迹大数据的交通拥堵评估和预测
1
2021
... 参考文献[77 ]利用 ARIMA 模型对城市路网的路段轨迹进行预测,较好地模拟了路段轨迹密度的变化,能做出最短时间的路径规划,但是 ARIMA模型预测很难反映交通状况的非线性,无法克服不确定性对轨迹的影响.针对此问题,许涛[78 ] 基于海量出租车轨迹数据,采用 BP 神经网络对路程时间进行预测,有效节省了交通时间.范静宏[79 ] 针对船舶轨迹导航和预测问题,使用卡尔曼滤波实现船舶航迹的预测和导航,降低了海事监管部门的压力.应文健[80 ] 融合多源信息实现自主车前方车体的行为预测,准确定位并实时预测前车驾驶趋势,有效提升了行车的安全可靠性.基于目标轨迹预测可实现个性化导航,Dai J 等人[81 ] 采用混合高斯分布建模分析用户行为,利用历史轨迹数据预测用户偏好,个性化规划导航.基于历史轨迹数据和实时的交通信息进行预测,可以安排最优路径,有效节省时间并缓解交通拥堵[82 ] ,但是目前偏向于对单个目标进行路径引导,在实际应用中更符合需求的总体协调规划研究还处于起步阶段[83 ] . ...
基于轨迹大数据的交通拥堵评估和预测
1
2021
... 参考文献[77 ]利用 ARIMA 模型对城市路网的路段轨迹进行预测,较好地模拟了路段轨迹密度的变化,能做出最短时间的路径规划,但是 ARIMA模型预测很难反映交通状况的非线性,无法克服不确定性对轨迹的影响.针对此问题,许涛[78 ] 基于海量出租车轨迹数据,采用 BP 神经网络对路程时间进行预测,有效节省了交通时间.范静宏[79 ] 针对船舶轨迹导航和预测问题,使用卡尔曼滤波实现船舶航迹的预测和导航,降低了海事监管部门的压力.应文健[80 ] 融合多源信息实现自主车前方车体的行为预测,准确定位并实时预测前车驾驶趋势,有效提升了行车的安全可靠性.基于目标轨迹预测可实现个性化导航,Dai J 等人[81 ] 采用混合高斯分布建模分析用户行为,利用历史轨迹数据预测用户偏好,个性化规划导航.基于历史轨迹数据和实时的交通信息进行预测,可以安排最优路径,有效节省时间并缓解交通拥堵[82 ] ,但是目前偏向于对单个目标进行路径引导,在实际应用中更符合需求的总体协调规划研究还处于起步阶段[83 ] . ...
基于车辆轨迹的个性化路径导航与行程时间预测
1
2018
... 参考文献[77 ]利用 ARIMA 模型对城市路网的路段轨迹进行预测,较好地模拟了路段轨迹密度的变化,能做出最短时间的路径规划,但是 ARIMA模型预测很难反映交通状况的非线性,无法克服不确定性对轨迹的影响.针对此问题,许涛[78 ] 基于海量出租车轨迹数据,采用 BP 神经网络对路程时间进行预测,有效节省了交通时间.范静宏[79 ] 针对船舶轨迹导航和预测问题,使用卡尔曼滤波实现船舶航迹的预测和导航,降低了海事监管部门的压力.应文健[80 ] 融合多源信息实现自主车前方车体的行为预测,准确定位并实时预测前车驾驶趋势,有效提升了行车的安全可靠性.基于目标轨迹预测可实现个性化导航,Dai J 等人[81 ] 采用混合高斯分布建模分析用户行为,利用历史轨迹数据预测用户偏好,个性化规划导航.基于历史轨迹数据和实时的交通信息进行预测,可以安排最优路径,有效节省时间并缓解交通拥堵[82 ] ,但是目前偏向于对单个目标进行路径引导,在实际应用中更符合需求的总体协调规划研究还处于起步阶段[83 ] . ...
基于车辆轨迹的个性化路径导航与行程时间预测
1
2018
... 参考文献[77 ]利用 ARIMA 模型对城市路网的路段轨迹进行预测,较好地模拟了路段轨迹密度的变化,能做出最短时间的路径规划,但是 ARIMA模型预测很难反映交通状况的非线性,无法克服不确定性对轨迹的影响.针对此问题,许涛[78 ] 基于海量出租车轨迹数据,采用 BP 神经网络对路程时间进行预测,有效节省了交通时间.范静宏[79 ] 针对船舶轨迹导航和预测问题,使用卡尔曼滤波实现船舶航迹的预测和导航,降低了海事监管部门的压力.应文健[80 ] 融合多源信息实现自主车前方车体的行为预测,准确定位并实时预测前车驾驶趋势,有效提升了行车的安全可靠性.基于目标轨迹预测可实现个性化导航,Dai J 等人[81 ] 采用混合高斯分布建模分析用户行为,利用历史轨迹数据预测用户偏好,个性化规划导航.基于历史轨迹数据和实时的交通信息进行预测,可以安排最优路径,有效节省时间并缓解交通拥堵[82 ] ,但是目前偏向于对单个目标进行路径引导,在实际应用中更符合需求的总体协调规划研究还处于起步阶段[83 ] . ...












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}