物联网学报 ›› 2018, Vol. 2 ›› Issue (2): 58-64.doi: 10.11959/j.issn.2096-3750.2018.00054
庞茂1,王玫2,宋浠瑜1,罗丽燕1,阮琨1
Mao PANG1,Mei WANG2,Xiyu SONG1,Liyan LUO1,Kun RUAN1
摘要:
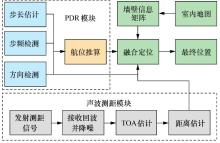
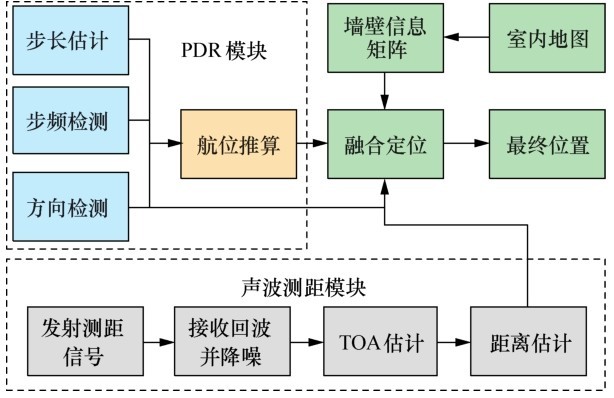
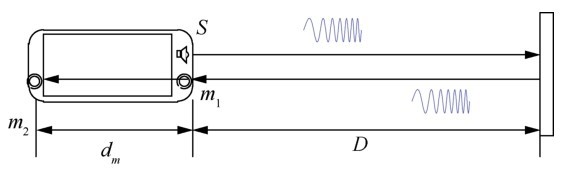
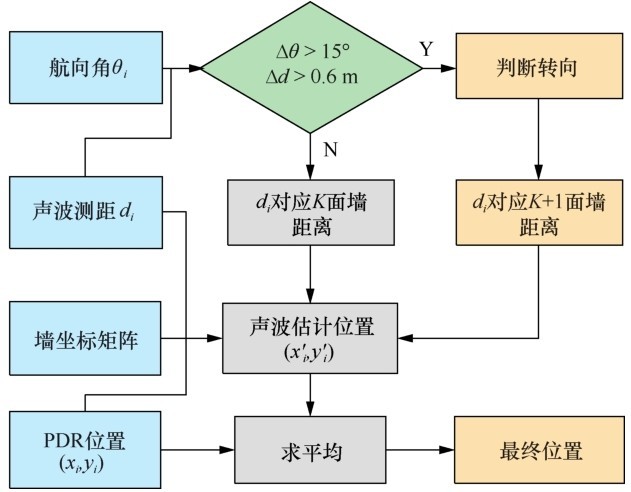
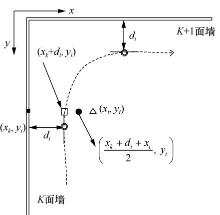
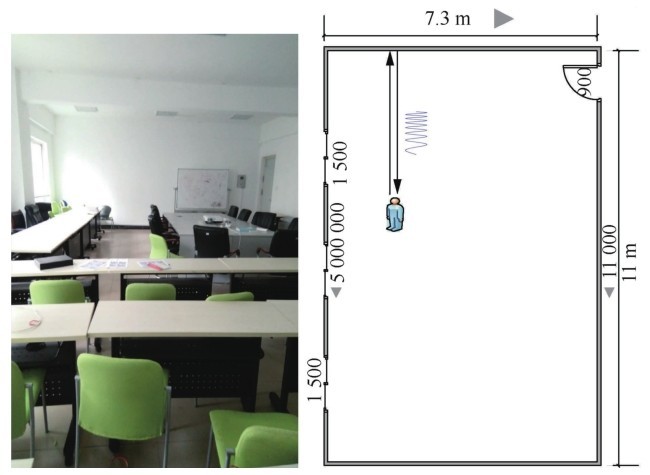
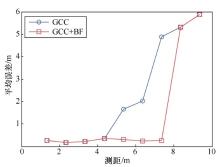
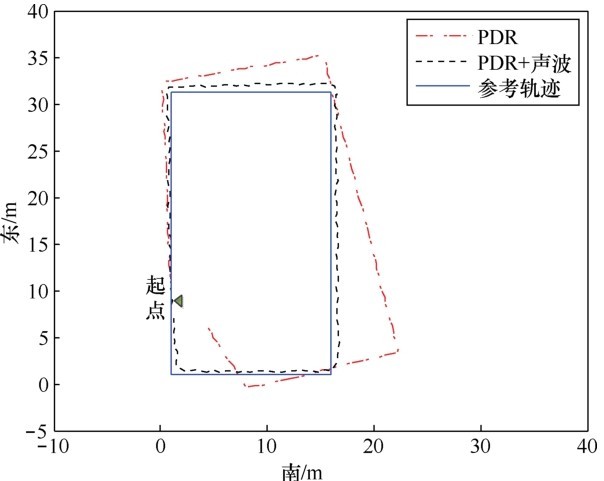
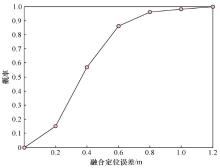
在室内定位过程中,针对行人航迹推算(PDR,pedestrian dead reckoning)算法中惯性传感器的累积误差随时间增大的问题,提出一种基于智能手机的声波测距与PDR融合的室内定位方法。首先,利用PDR进行位置推算,然后,利用声波测量手机与墙之间的距离,结合已知的室内地图信息,对 PDR 中的累积误差进行纠正。在不需要布置任何节点的条件下,实现长时间稳定的室内定位。为解决长距离条件下墙体反射的回波信号难以检测的问题,利用智能手机内置双麦克风的特点,采用波束成形的方法,对目标墙体反射的回波进行信号增强,增大了声波测距的有效测量距离,从而扩大了所提定位方法的应用范围。实验结果表明,所提融合定位方法的平均定位误差为0.427 m,与单独使用PDR的定位结果相比,平均定位误差降低了2.748 m。
中图分类号:
|
||