







1 Nomenclature
a: major radius of ellipse
b: minor radius of ellipse
D: aerodynamic Drag
D(S): drag coefficient based on maximum cross-section
F: buoyancy of airship
g: acceleration of gravity
m: mass of airship hull
T: thrust of airship power system
V: volume of hull
x: variable in optimization
d/l: slenderness ratio of hull
Qsupply: the power energy system supplies
Qrequire: the power energy system requires
2 Introduction
Near space is the airspace between altitudes of 20 km and 100 km above the Earth; this airspace consists of most of the stratosphere (approxi-mately 10~55 km), the intermediate layer (55~85 km), and the bottom of the thermosphere (85~800 km)[1]. The environment in the near space region is harsh with thin air, low tem-perature, severe ozone corrosion , and strong ultra-violet , but little thunderstorms and lightning and no cloud, rain, and air turbulence. Hence, in this regard, it is more convenient than the conventional flight aerospace. Moreover, near space is at a much lower altitude than outer space, and hence, the risk, cost, and difficulty to launch aircraft into the near space is much less than that to launch aircraft into the outer space, but much higher than that to launch aircraft in the sky, which is the target region for intelligence gathering, investigative surveillance, communications and security, and space warfare. In view of the cur-rent situation, countries are interested in launching high altitude airships into near space, mainly because it is difficult to achieve lift for the conventional air-craft at low speed in the thin atmosphere of near space. However, it is easy to obtain the desired lift by increasing the volume of the hull of an airship, in other words, by employing buoyancy. Therefore, near space airships typically have large hulls and long endurance. In this study, MDO (the multidisciplinary design optimization) method to optimize the model, shorten the design cycle, and reduce the development costs simultaneously[2]. In addition, variable complex-ity modeling using a surrogate model was carried out based on highfidelity models provided by a commer-cial analysis software; these models can balance the computational cost and model accuracy. This process is easy to carry out in the MDO structure. Therefore, study of near space airship platforms by the MDO method has potential for application in theoretical and engineering studies[3].
3 Domestic and international situation of near space airship
3. 1 Development outland
Since near space airships can realize long endurance cruise at high altitudes and can carry loads exceeding 500 kg, these airships have important applications in military and civilian fields. The USA, Russia, Japan, South Korea, and other countries have carried out research on near space airships for nearly 15 years.
The USA launched a variety of prototypes and carried out work on prototype system develop-ment and flight tests; the prototypes include HAA (High Altitude Airship) and its sub-scale demon-strator, the HALE-D (High Altitude Long Endur-ance-Demonstrator) of the US Missile Defense Agency (NORAD) and Lockheed Martin (as shown in Fig.1 and Fig.2), the ISIS (Integrated Sensor is Structure) project; the high-altitude sentinel pro-ject by SwRI (Southwest Research Institute); and the Project Loon by Google (as shown in Fig.3)[4], [5]. The HAA and ISIS airships can provide continuous fixed communication, intelligence, surveillance, and reconnaissance services for the US military. Fur-ther, they can be used for wide-area networking[6]. Several projects among those listed above are in the manufacturing and flight test stages at present. The HAA prototype airship made its first test flight in July 2011; it was tested for approximately 3 h, and it reached a height of 9 754 m before emergency landing. Although this trial did not accomplish its goal, Lockheed Martin claimed that they had realized high-altitude airship core technology. In 2008 and 2010, two test flights of the Sentinel altitude airship were car-ried out at a height of 20 km. Owing to system component failure, the airship only stayed at the height for a few hours, and failed to reach the predetermined target. The Google Loon project has progressed rapidly in the recent times. The Google balloon can now cruise around the Earth for more than six months, as compared to the 10h of flight initially. Moreover, Google plans to expand its coverage in all 50 states of US in 2016.
In order to effectively promote the development of near space airships, the US NASA (National Aeronautics and Space Administration) announced its in tention to develop a new near space airship in August and September 2014. To summarize, the near space airship is still an important technology that is under development in the field of near space low-speed aircraft.
Figure 1

Figure 1
HAA
Figure 2

Figure 2
HALE-D
Figure 3

Figure 3
Google project loon
3. 2 Development inland
Research on near space airships in China began in the 10th Five-Year period. A number of universities and research institutes participated in demonstration programs for developing key technologies and other basic research. Some private enterprises also participated in the development of near space air-ships. During the 11th and 12th Five-Year periods, Beihang University completed several test flights at altitudes exceeding 20 km and made some impor-tant breakthroughs on key technologies such as the overpressure hull, airship cycle energy, propulsion, flight control, and issuance recycling. In October 2015, Beihang University along with Nanjiang Aer-ospace Technology Co. Ltd. , carried out a successful long-endurance near space airship flight test in inner Mongolia near the city of Xilinhot (Fig.4). Domesti-cally, near space airship projects have exhibited good progress; in particular, a number of corporations have carried out high-altitude flight tests; many sub-system technologies were realized after actual examination, and innovative designs were validated by the flight tests.
Figure 4

Figure 4
Yuanmeng near space airship launch
4 Conceptual design of near space airship based on MDO
The conventional aircraft design method is based on a serial design pattern. This method has many disad-vantages[7], [8]. For example, the theoretical prototype design stage is insufficient. Various disciplines are not sufficiently coupled. Further, the conventional method does not make full use of the space of virtu-al design to improve quality and does not integrate different disciplines to realize optimization. There-fore, these old approaches cannot be adapted to new demands; in other words, the conventional aircraft design is rigid[9], [10]. The modern design theory system, multidisciplinary target system design, and optimi-zation theory have rapidly developed. The main idea is to improve the proportion of the virtual design throughout the entire process, to account for the balance and coupling information of various disciplines at each stage, to optimize the overall framework using a highly effective optimization strategy, and to integrate the de-sign process for producing a synergistic effect with the application of a distributed computing network, and finally to obtain the optimal system solution[11].
During the conceptual design phase of near space airships, the MDO method is applied to the process in which structure and aerodynamic disciplines are taken into consideration. In order to obtain the opti-mal solution of the near space airship, the coupling between the disciplines is studied with the aim of satisfying the constraints of thrustCdrag balance, buoyancyCweight balance, and energy balance[12], as Fig.5.
Figure 5
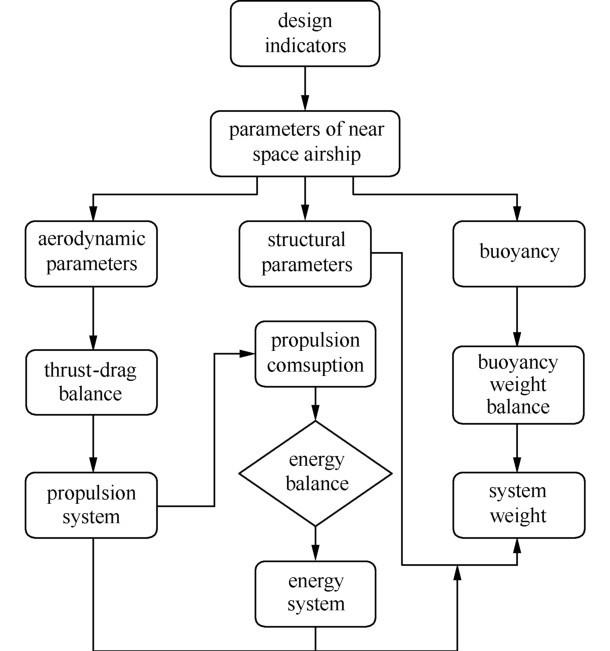
Figure 5
Conceptual design process
4. 1 Scheme of near space airship
In the case of a conventional airship, the buoyancy (lift) and flight speed is decoupled, and there is no direct coupling relationship between the two factors, and this is different from the characteristics of normal aircrafts. Consequently, the thrustCdrag balance and buoyancyCweight balance in a near space airship can be considered separately. The static stability of the airship hull is mainly ensured by the tail, but the efficiency of near space airship tail stabilizer is very low because of the low air speed, which is generally less than 25 m/s, and the very low thin-air density in near space. Besides, streamlined slender body has a serious problem in aerodynamic divergence; it needs to increase the area of the tail stabilizer to ensure its stability, which would cause system weight increase, drag increase, required hull strength increase, so, to ensure stability with the tail is not realistic in this case. Furthermore, since the airship hull is huge, it exerts a large inertial force, which leads to poor mo-bility. The maneuverability of the airship will reduce severely if the airship layout is designed to realize static stability. In order to enhance the maneuvera-bility, the area of the tail control surfaces must be in-creased, which in turn has a negative effect of leading to an increase in the weight of the hull and hull aer-odynamic drag[13]. Therefore, in this work, a tailless layout in the form of static instability is considered for reducing the hull drag significantly, and an active control scheme is used to counter the instability.
4. 2 Subsystem analysis
4.2. 1 Envelope of near space airship hull
In this work, the design and optimization process were based on the cruise phase of a near space airship, and the parameters refer to a certain near space airship that was tested successfully. The airship hull layout is from the UKs National Physical Laboratory, and it has low aerodynamic drag. The cross section along the symmetry axes is determined by two elliptic equations, and the curvature of the hull tail is higher than that of the head so that the possibility of flow separation can be reduced. Moreover, if the tail is too sharp, it would sag after the inflation, and hence, it is trimmed to arcuation considering the structure strength and stiffness requirement[14]. The two-param-eter NPL model is illustrated in Fig.6. Let
The hull layout parametric equation can be expressed as:
Figure 6

Figure 6
NPL model geometry section
Table 1 Parameter of hull layout
| design variable | range | baseline |
| a1/m | (20,30) | 28 |
| b/m | (8,15) | 12 |
4.2. 2 Aerodynamic shape analysis
The flight performance of near space airships is very important for accomplishing all types of missions. Building the dynamics and kinematics models of the airship is a precondition for analyzing the flight performance parameters such as stability, manipulability, and the design of control law. The dynamics model mainly involves acquiring the external forces acting on the hull. For these forces and moments, it is very important to acquire accurate aerodynamic data. Aerodynamic drag is a very important part of the aerodynamic data used in the dynamics and kinematics models of the airship. With the development of CFD (Computational Fluid Dynamics) and performance of computers, CFD is being used for computing the dynamic forces and moments of different objects.
In this work, we proposed a steady pressurebased CFD solver to obtain the drag. Prior to this study, mesh generation was carried out in ICEM CFD. Multiblock structured topologies were employed to allow for a good representation of the dynamic shape. The blocks were also used to allow for easy sharing of the computational load between processors for parallel computing. Because the vehicle is symmetric with respect to the middle-flow plane and because the flow yaw angle is zero, only half of the vehicle was meshed. This reduced the size of the grid by half and saved computational resources. At the inflow, out-flow, and far-field boundaries, the conditions of the inner region and envelope surface were assumed as presented in Tab.2. The mesh is shown in Fig.7.
Table 2 Boundary conditions
| zone | type |
| inflow(blue) | velocity-inlet |
| outflow(red) | pressure-outlet |
| far-field boundaries(blue) | velocity-inlet |
| envelope surface(white) | wall |
| symmetry plane(yellow) | symmetry |
Figure 7

Figure 7
Multibolck mesh for flow region
4.2. 3 Structural topology analysis
The shape of a non-rigid airship is sustained by a pressure differential between the lifting gas in the hull and the atmosphere. An envelope such as the gas containment membrane encloses the lifting gas and provides protection from the environment. Consequently, the envelope membrane is a key part of the structural system in this work. The airship envelope fabric consists of a laminated composite and is designed to withstand environmental and flight loads. The fabric that is used to make the envelope has the following properties: high strength-to-weight ratio and this allows for weight reduction; low creep to maintain constant volume and shape; low permeability to ensure the purity of the lifting gas; high resistance to environment conditions to protect the airship from temperature, moisture, and ultraviolet radiation; and high fatigue and rupture strength to ensure the functionality of the envelope.
The structure analysis was carried out in Abaqus/Explicit. For the incompressible member, four-noded membrane elements with reduced integration (M3D4R) and three-noded membrane elements (M3D3) were used for the membrane. To avoid the bursting of the envelope material during work, the stress and strain of the envelope as determined by the different pressure between the inner and outside sides of the envelope must be lower than the tensile strength of the envelope material. Hence, in this study, the total pressure has three components, namely, the different pressure to avoid caving of the nose of the airship, the different pressure caused by aerodynamics, and the different pressure caused by the small hydrostatic effect attributed to the lifting gas and the air outside the envelope.
4.2. 4 Energy system analysis
Solar radiation intensity depends on numerous var iables such as location, time, plane orientation and reflection of the ground, and weather conditions. In this study, the solar radiation model was simplified to a plane with the positive part of sine curve, as shown in Fig.8.
The energy subsystem consists of a solar array to generate power, a battery to store the power for con-sumption at night, and other auxiliary components. A diagram of the energy subsystem is given in Fig.9. The energy sub-system is used to calculate the energy generated in one day and the mass of energy subsys-tem.
Figure 8
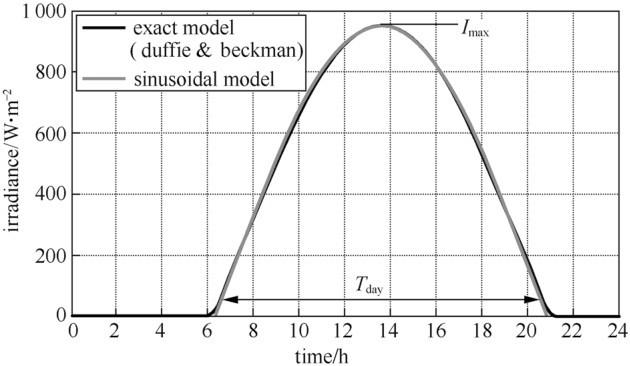
Figure 8
Solar radiation model
Figure 9
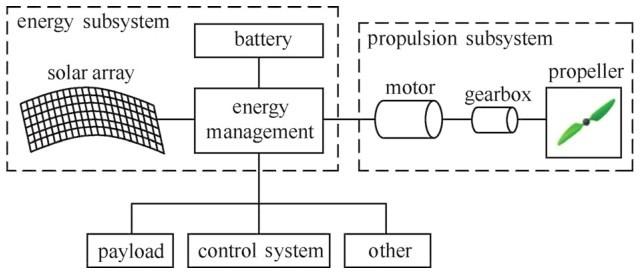
Figure 9
Energy subsystem platform
4. 3 Realization of near space airship MDO
According to the MDO theory, three important factors, optimization objectives, system variables, constraints, combined with aerodynamics, structure, and energy disciplines are necessary to obtain the MDO framework:
Optimization objective: the lightest total structure weight
System variables: structural parameters
Constrains: 1. thrust-drag balance 2. buoyancyweight balance 3. energy balance
Mathematical description:
min m(x) , (2)
Base on the near space airship MDO, the optimi-zation of each subsystem, that is, aerodynamic, struc-ture, and energy model optimization, is integrated in iSight, as shown Fig.10.
Figure 10
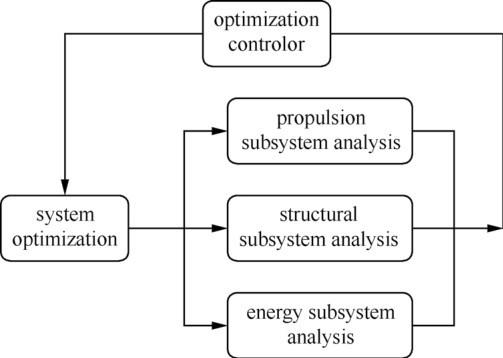
Figure 10
Optimization framework based on iSight
5 Result analysis
Using the model, we conducted some case studies based on real-world projects.
The optimization framework converged to the de-sired result after loop iteration in iSight. Compared to the baseline model, the slenderness ratio increased significantly, which reduced the aerodynamic drag greatly. Furthermore, because of the increase in the curvature of the hull head and tail section, the hull surface stress reduced, which in turn helped main-tain the shape under high inner work pressure. The changes in the slenderness ratio, volume, and mass of the hull and the drag coefficient based on the maxi-mum cross section are presented in Tab.3,Fig.11, and Fig.12. All data values except D(S), reduced signifi-cantly. D(S) increased after optimization because the reduction ratio of the maximum crosssectional area was greater than the reduction ratio of drag. Hence, the optimization result is optimistic overall. Fig.13 shows the optimal static pressure of the hull shape, and Fig.14 shows the optimal displacement of hull structure.
Figure 11
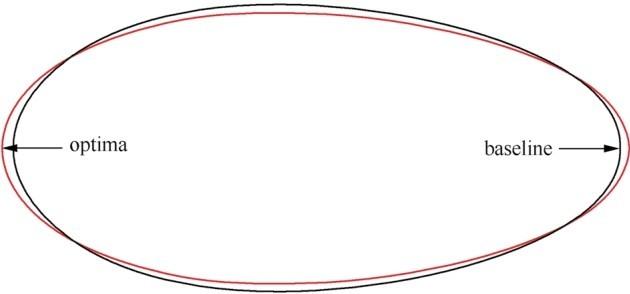
Figure 11
Comparison after optimiza
Table 3 Comparison of optimization
| parameter | baseline | optima | change rate |
| d/1 | 0.36 | 0.31 | -11.69% |
| V/m3 | 15 468.00 | 14 797.00 | -4.34% |
| m/kg | 1 116.71 | 1 058.37 | -5.22% |
| D(S) | 0.062 5 | 0.063 1 | 0.83% |
Figure 12
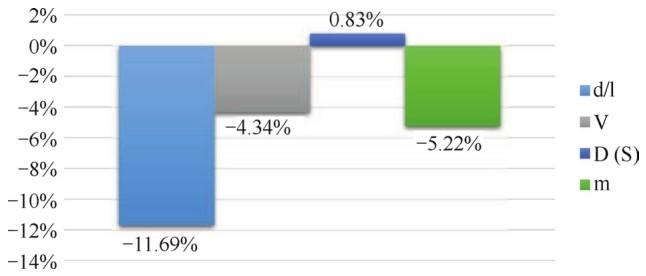
Figure 12
Percentage changes in system parameters
Figure 13

Figure 13
Optimal static pressure contour
Figure 14
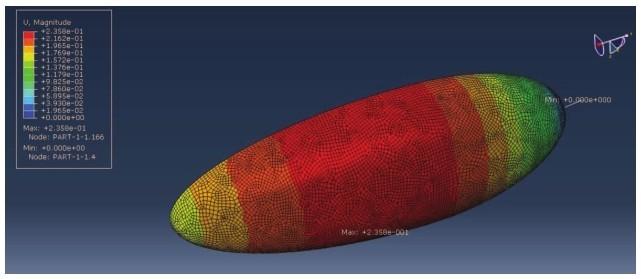
Figure 14
Optimal displacement contour
6 Conclusion
Near space airships, a type of new conceptual vehicles, involve multiple disciplines, and hence, this research mainly focused on aerodynamics, structure, and energy. Because the layout of the hull has signicant in uence on the aerodynamics, structure, and energy subsystem, a trade off among the three coupling disciplines is necessary. Therefore, we employed the MDO method instead of the conventional serial design pattern to design and optimize the near space airship. The optimization framework was built on the iSight platform based on the MDO method. This work provides an efficient way to design and optimize near space airships. This method was applied in the design of the Yuanmeng near space airship, which achieved flight control day and night. The new layout techniques, including the hull pressure-resistant technology, electricity propulsion technology, energy cycle technology, and region residence technology were verified.
Reference
Design and applications of a stratospheric long endurance LTA platform
[R].
Multidisciplinary design optimization method and its application in aircraft design
[D].
A modular sizing model for high-altitude/long-endurance airships
[C]//
Preparation and enhanced electrochemical properties of nano-sulfur/poly (pyrrole-co-aniline) cathode material for lithium/sulfur batteries
[J].
Energy management strategy for solar-powered high-altitude long-endurance aircraft
[J].
status and development of foreign near space airship
[J].
Aerodynamic analysis of the joined-wing configuration of a HALE aircraft
[C]//
Development of a solar powered micro air vehicle
[R].
Multidisciplinary design application in the field of aerospace development
[J].
Research on distributed computing environment for MDO
[J].
An introduction to multidisciplinary design of aircraft optimization technique
[J].
A PC-based design and analysis system for lighter-than-air unmanned vehicles
[C]//
Advances in aerodynamics research of stratospheric airship
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}