

电信科学 ›› 2023, Vol. 39 ›› Issue (3): 45-60.doi: 10.11959/j.issn.1000-0801.2023048
王鲲1, 董振江2, 杨凡1, 周谷越3
修回日期:2023-03-16
出版日期:2023-03-20
发布日期:2023-03-01
作者简介:王鲲(1987- ),男,北京百度智行科技有限公司车路协同技术战略专家,主要研究方向为C-V2X、车路协同自动驾驶基金资助:Kun WANG1, Zhenjiang DONG2, Fan YANG1, Guyue ZHOU3
Revised:2023-03-16
Online:2023-03-20
Published:2023-03-01
Supported by:摘要:
随着车联网技术的演进,自动驾驶在单车智能的基础上,又有了新的发展形态——车路协同自动驾驶。通过“人-车-路-云”深度融合形成的一体化复杂信息物理系统(cyber physical system,CPS),可以与自动驾驶车辆实现协同感知、协同决策规划甚至协同控制,提升自动驾驶安全性,帮助克服各类复杂交通环境。首先介绍了车路协同的复杂信息物理系统的概念内涵和总体架构,并提出了车路协同自动驾驶的一系列典型应用场景、技术原理、C-V2X(cellular vehicle-to-everything)性能要求、车路协同系统功能与性能要求,可以为下一阶段智能网联汽车与智能交通的深度融合发展提供参考和解决思路。
王鲲, 董振江, 杨凡, 周谷越. 基于C-V2X的车路协同自动驾驶关键技术与应用[J]. 电信科学, 2023, 39(3): 45-60.
Kun WANG, Zhenjiang DONG, Fan YANG, Guyue ZHOU. Key technologies and applications of C-V2X based vehicle-infrastructure cooperative autonomous driving[J]. Telecommunications Science, 2023, 39(3): 45-60.
图1
基于C-V2X的车路协同自动驾驶"
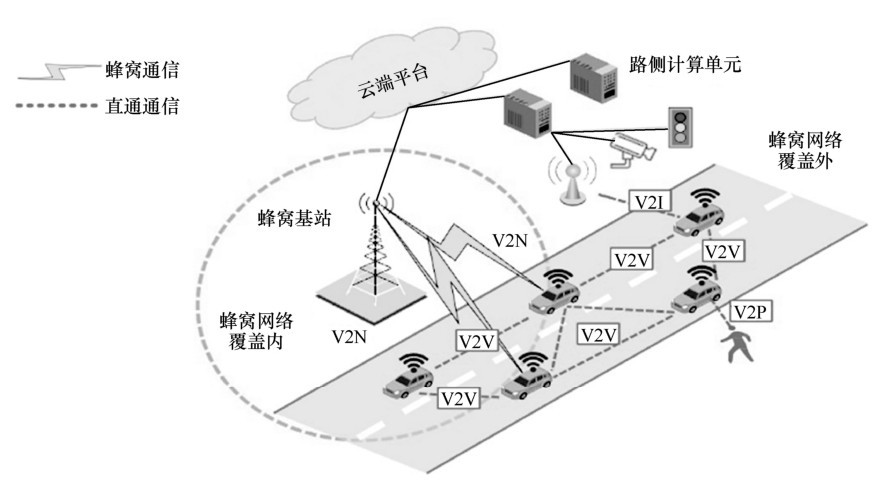
图2
VICS模型"
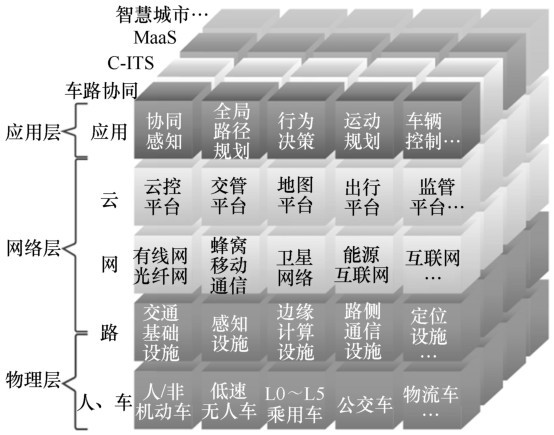
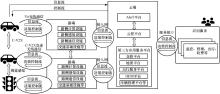
图3
VICS物理视图"

表1
车路协同系统C-V2X通信性能指标要求"
| 通信场景描述 | 有效负荷/byte | 发送频率/Hz | 最大端到端时延/ms | 可靠性 | 数据速率/ (Mbit·s-1) | 最小通信范围/m |
| 全量高精度协同感知 | 300~400 | 10~20 | 20 | 90%~99.99% | 10 | 80~350 |
| 协同决策控制 | 300~12 000 | 10~100 | 3~20 | 99.999% | 25~1 000 | 1 000 |
表2
车路协同系统融合感知定位性能指标要求"
| 道路功能或性能要求 | 具体指标 | |
| 交通对象感知定位 | 类型识别 | 准确率≥95% |
| (机动车、非机动车、行人、障碍物等) | 召回率≥95% | |
| 位置精度 | 3 m(99分位) | |
| 0.5 m(均值要求) | ||
| 速度大小精度 | 4.5 m/s(99分位) | |
| 1.5 m/s(均值) | ||
| 速度方向精度 | 10°(99分位) | |
| 对象预测轨迹3 s最终偏差 | <3.5 m | |
| 对象预测轨迹3 s平均偏差 | <1.5 m | |
| 路侧对象感知端到端时延(含通信时延) | ≤200 ms(99分位) | |
| 数据发送频率 | ≥10 Hz | |
| 交通事件感知定位 | 事件类型识别 | 准确率≥95%;召回率≥95% |
| 定位精度 | 3 m(99分位) | |
| 事件感知端到端时延(含通信时延) | ≤200 ms(99分位) | |
| 数据发送频率 | ≥10 Hz | |
| 红绿灯能力 | 路侧红绿灯颜色感知准确率 | 99.999 9% |
| 故障灯状态识别率 | 99.999 9% | |
| 红绿灯数据端到端时延 | ≤200 ms(99分位) | |
| 红绿灯数据发送频率 | ≥8 Hz | |
| 地图要素实时检测能力 | 交通设备物理位置和属性变更检测 | 准确率≥99%,召回率≥99% |
| 地面标识位置和属性变更检测 | 准确率≥99%,召回率≥99% |
表3
交通事件类型识别要求"
| 序号 | 可识别事件类型 | 服务对象 | ||
| I类 | Ⅱ类 | Ⅲ类 | ||
| 1 | 交通事故 | ● | ● | ● |
| 2 | 道路施工 | ● | ● | ● |
| 3 | 拥堵事件 | ● | ● | ● |
| 4 | 停止事件 | ○ | ● | ● |
| 5 | 逆行事件 | ○ | ● | ● |
| 6 | 异常低速/超速事件 | ○ | ● | ● |
| 7 | 行人闯入事件 | ○ | ○ | ● |
| 8 | 抛洒物事件 | ○ | ○ | ● |
| 9 | 机动车驶离 | ○ | ○ | ● |
| 10 | 非机动车闯入 | ○ | ○ | ● |
| 11 | 机动车闯红灯 | ○ | ○ | ● |
| 12 | 机动车不按导向行驶 | ○ | ○ | ● |
| 13 | 实线变道 | ○ | ○ | ● |
| 14 | 不礼让行人 | ○ | ○ | ● |
| 15 | 机动车占用非机动车道行驶 | ○ | ○ | ● |
| 16 | 非机动车占用机动车道行驶 | ○ | ○ | ● |
| 17 | 其他自定义事件 | ○ | ○ | ○ |
| 注:“●”表示应具备功能,“○”表示宜具备功能。 | ||||

图4
VICAD自动驾驶计算、感知、决策、控制的一体化"

表4
VICAD典型应用场景举例"
| 类别 | 场景类别 | 场景子类别/名称 | 适用标准 | |
| 1 | 自动驾驶地图更新 | 地图要素变更:交通红绿灯 | 标准制定中 | |
| 地图要素变更:车道线 | ||||
| 2 | 协同感知 | 路端红绿灯融合感知 | YD/T 3978-2021 | |
| 静态盲区/遮挡协同感知 | ||||
| 动态盲区/遮挡协同感知 | ||||
| 超视距协同感知 | ||||
| 低速车辆协同感知 | ||||
| 道路遗撒与低矮障碍物协同感知 | ||||
| 3 | 协同决策规划 | 行为决策 | 排队决策 | 标准制定中 |
| “死车”决策 | 标准制定中 | |||
| 行为决策+运动规划 | 交叉口协调通行 | T/CSAE 157-2020 | ||
| 阻塞绕行 | 标准制定中 | |||
| 路口内施工绕行 | T/CSAE 157-2020 | |||
| 路径导航+行为决策+运 | 合作式代客泊车 | T/CSAE 156-2020 | ||
| 动规划 | 编队行驶 | T/CSAE 157-2020 | ||
| 4 | 协同控制 | 控制车辆:5G云代驾 | 标准制定中 | |
| 控制基础设施:优先通行 | 标准制定中 | |||
| 控制基础设施:绿波通行 | 标准制定中 |
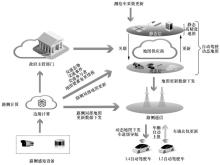
图5
路端局部动态地图更新总体原理"

表5
3种地图更新方式比较"
| 地图更新方式 | 相对精度/m | 实时性 | 观测连续性 | 覆盖范围 | 成本估算/(万元·km-1) |
| 测绘车地图更新 | 0.1 | — | 单点观测 | 区域全覆盖 | 千元级别 |
| 车端众包地图更新 | 0.4 | 天级别 | 断点重复观测 | 区域大部分覆盖 | 无须新增设备投入 |
| 路端局部地图更新 | 0.2 | 分钟级别 | 定点连续观测 | 区域路口覆盖 | 无须新增设备投入 |

图6
车路协同感知总体原理"
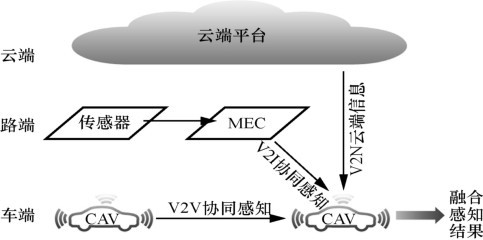
表6
地图要素变更场景下VICAD收益分析"
| 地图更新方式 | 地图更新间隔D | 场景遭遇率M | 场景成功率P | |
| 条件1RVICAD=99% | 条件2 RVICAD=99.9% | |||
| 车端众包地图更新 | ≥24 h | 6.38次/万千米 | PAD变更=90% | PAD变更=99.8% |
| 路端局部动态地图更新 | ≤5 min | 0.058 7次/万千米(RVICAD=99%条件下) | PVICAD变更≈99.86% | PVICAD变更≈99.999% |

图7
路侧多冗余红绿灯协同感知总体原理"
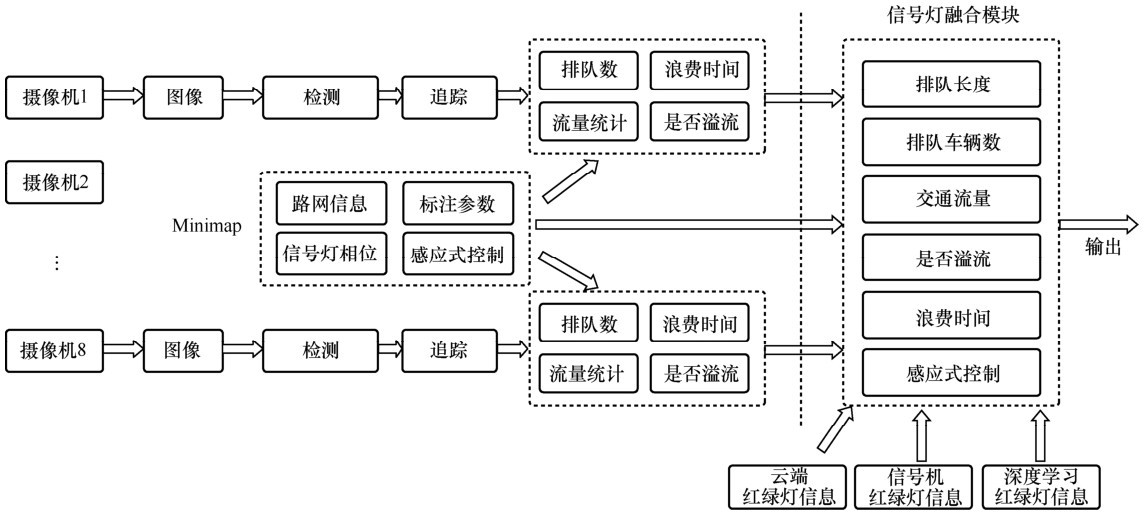
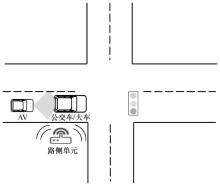
图8
路侧红绿灯融合感知应用"
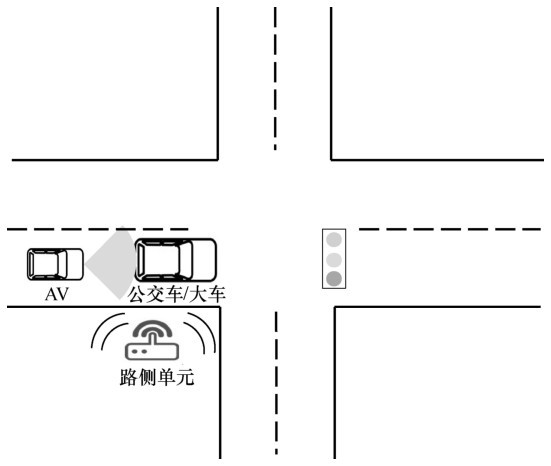
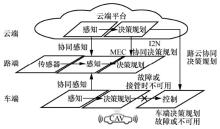
图9
车路协同决策规划总体原理"
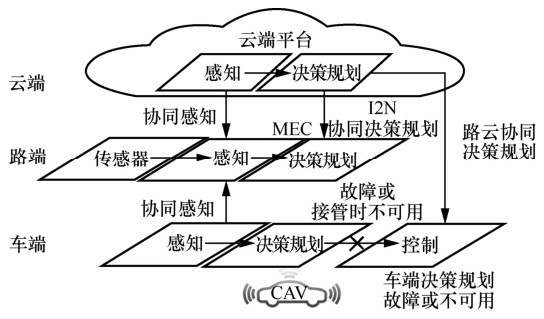

图10
施工场景动态路径规划"
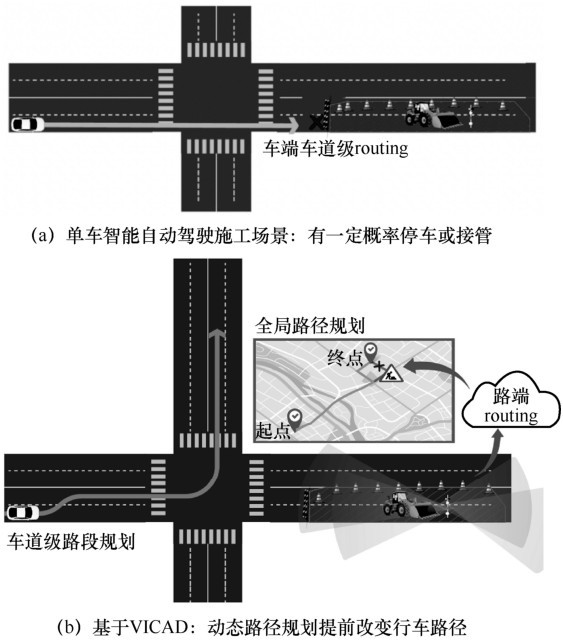

图11
施工场景车路协同决策规划"


图12
车路协同控制总体原理"
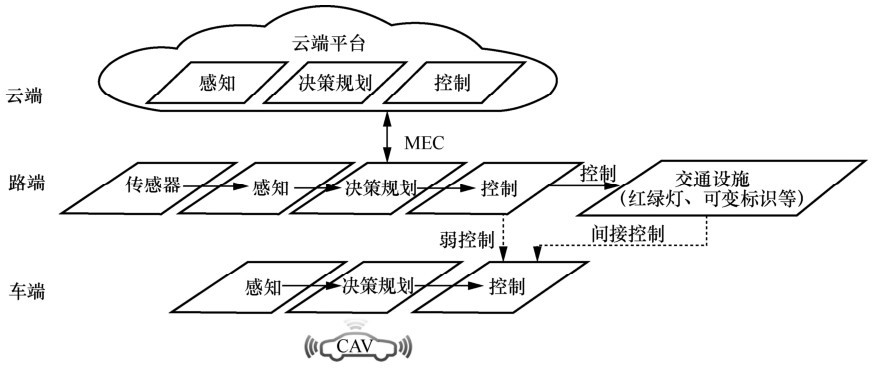
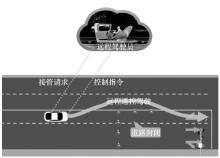
图13
跨道路阻断、车端主动请求接管示意图"
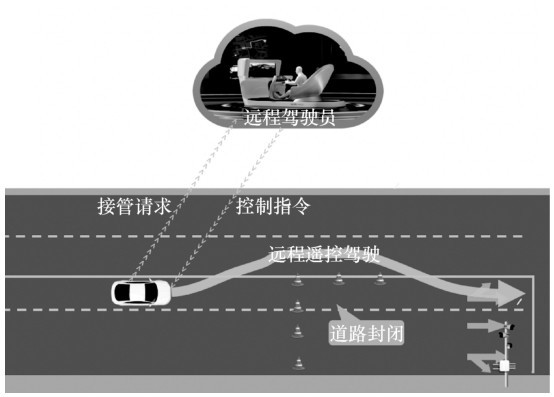
表7
施工场景下VICAD收益分析"
| 比较项 | 车路协同决策规划链路时间D | 场景遭遇率M | 场景成功率P | |
| 条件1 | 条件2 | |||
| 单车智能决策控制 | — | 4.5次/万千米 | P未认知施工=90% | P未认知施工=99.8% |
| RVICAD=99% | RVICAD=99.9% | |||
| 车路协同决策控制 | ≤3 min | 0.027 0次/万千米 | PVICAD施工≈99.87% | PVICAD施工≈99.999 1% |
| (RVICAD=99.9%条件下) | ||||
| [1] | USDOT. Automated vehicles comprehensive plan[R]. 2021. |
| [2] | USDOT. ITS strategic plan[R]. 2014. |
| [3] | The European Road Transport Research Advisory Council (ERTRAC). Connected automated driving roadmap[R]. 2021. |
| [4] | SAE. Taxonomy and definitions for terms related to cooperative driving automation for on-road motor vehicles:SAE J3216[S]. 2020. |
| [5] | The European Road Transport Research Advisory Council (ERTRAC). Cooperative intelligent transport systems and services[R]. 2022. |
| [6] | The European Road Transport Research Advisory Council (ERTRAC). Cooperative,connected and automated mobility (CCAM)[R]. 2021. |
| [7] | USDOT. Architecture reference for cooperative and intelligent transportation[R]. 2023. |
| [8] | 边缘计算产业联盟,工业互联网产业联盟. Architecture reference for cooperative and intelligent transportation[R]. 2019. |
| Edge Computing Consortium,Alliance of Industrial Internet. Edge computing reference architecture3.0[R]. 2019. | |
| [9] | 中国电子技术标准化研究院. 信息物理系统标准化白皮书[R]. 2017. |
| China Electronics Standardization Institute. White paper on the standardization of information-based physical systems[R]. 2017. | |
| [10] | 国家质量监督检验检疫总局,中国国家标准化管理委员会. 物联网 参考体系结构:GB/T 33474—2016[S]. 北京:中国标准出版社, 2017. |
| General Administration of Quality Supervision,Inspection and Quarantine of the People’s Republic of China. GPP[S]. Internet of Things—reference architecture:GB/T 33474—2016, 2017. | |
| [11] | 国家市场监督管理总局,国家标准化管理委员会. 汽车驾驶自动化分级:GB/T 40429—2021[S]. 北京:中国标准出版社, 2021. |
| State Administration for Market Regulation,Standardization Administration of the People’s Republic of China. Classification of automobile driving automation:GB/T 40429—2021[S]. Beijing:Standards Press of China, 2021. | |
| [12] | ISO/IEC. Internet of things reference architecture:ISO/IEC 30141[S]. 2018. |
| [13] | 工业互联网产业联盟. 工业互联网体系架构2.0[R]. 2020. |
| Alliance of Industrial Internet. Industrial Internet system architecture2.0[R]. 2020. | |
| [14] | Industry IoT Consortium. The industrial internet of things:reference architecture[R]. 2012. |
| [15] | TAFIM. The open group architecture framework (TOGAF)[R]. 2014. |
| [16] | 中国公路学会自动驾驶工作委员会. 车路协同自动驾驶发展报告1.0版[R]. 2019. |
| The Autonomous Driving Working Committee of China Highway and Transportation Society. Vehicle-road collaborative autonomous driving development report version 1.0[R]. 2019. | |
| [17] | 清华大学,百度. 面向自动驾驶的车路协同关键技术与展望[R]. 2021. |
| Tsinghua University,Baidu. Key technologies and prospects of vehicle-Infrastructrue cooperated for autonomous driving[R]. 2021. | |
| [18] | SAE. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles:SAE J3016[S]. 2018. |
| [19] | 3GPP. Architecture enhancements for V2X services:TS 23.285,v14.9.0[S]. 2015. |
| [20] | 3GPP. System architecture for the 5G system; stage 2:TS 23.501,v16.3.0[S]. 2019. |
| [21] | 3GPP. Study on architecture enhancements for EPS and 5G System to support advanced V2X services:TR 23.786,v16.1.0[R]. 2020. |
| [22] | 3GPP. Physical layer; General description:TS 38.201,v16.1.0[S]. 2020. |
| [23] | 3GPP. NR and NG-RAN overall description:TS 38.300.v16.1.0[S]. 2020. |
| [24] | 3GPP. Study on enhancement of 3GPP support for 5G V2X services:TR 22.886[R]. 2020. |
| [25] | ETSI. Mobile edge computing a key technology towards 5G:WP11[S]. 2018. |
| [26] | ETSI. MEC deployments in 4G and evolution towards 5G:WP24[S]. 2018. |
| [27] | ETSI. MEC in 5G networks WP28[S]. 2018. |
| [28] | 5GAA. White paper-edge computing:T-170219[R]. 2022. |
| [29] | 5GAA. White paper C-V2X roadmap[R]. 2022. |
| [30] | 5G-PPP. Automotive-WG-White-Paper:a study on 5G V2X deployment[R]. 2018. |
| [31] | USDOT. Comprehensive maintenance and operations plan Wyoming:FHWA-JPO-17-473[R]. 2021. |
| [32] | USDOT. System architecture document -WYDOT CV pilot:FHWA-JPO-17-467[R]. 2021. |
| [33] | USDOT. System design document (SDD) - Wyoming CV Pilot:FHWA-JPO-17-468[R]. 2020. |
| [34] | 工业和信息化部. 基于车路协同的高等级自动驾驶数据交互内容:YD/T 3978—2021[S]. 2021. |
| MIIT. Data exchange standard for high level automated driving vehicle based on cooperative intelligent transportation system:YD/T 3978—2021[S]. 2021. | |
| [35] | 工业和信息化部. 基于 LTE 的车联网无线通信技术 总体技术要求:YD/T 3400—2018[S]. 2018. |
| MIIT. General technical requirements of LTE-based vehicular communication:YD/T 3400—2018[S]. 2018. | |
| [36] | 工业和信息化部. 基于 LTE 的车联网无线通信技术 空中接口技术要求:YD/T 3340—2018[S]. 2018. |
| MIIT. Technical requirements of air interface of LTE-based vehicular communication:YD/T 3340—2018[S]. 2018. |
| [1] | 张志龙, 张天琦, 李雪菲, 刘丹谱. 基于计算控制通信融合的车联网资源协同优化技术研究[J]. 电信科学, 2023, 39(4): 17-30. |
| [2] | 吴冬升, 李凤娜, 夏宁馨, 李大成. 智能网联汽车测试方案研究与展望[J]. 电信科学, 2023, 39(3): 61-69. |
| [3] | 韩凯峰,刘铁志. 基于反向散射通信的车辆精准定位技术[J]. 电信科学, 2020, 36(7): 107-117. |
| [4] | 刘玉超,李子月. 面向安防场景的智能网联巡逻车关键技术及应用[J]. 电信科学, 2020, 36(4): 53-60. |
| [5] | 李玉峰,陆肖元,曹晨红,李江涛,朱泓艺,孟楠. 智能网联汽车网络安全浅析[J]. 电信科学, 2020, 36(4): 36-45. |
| [6] | 王君,纪晓东,张欣然,温晓然,佟佳俊. 5G蜂窝车联网组网性能研究[J]. 电信科学, 2020, 36(1): 49-57. |
| [7] | 赵冰,刘志民,袁益明,韩涛. SoftCOM AI,自动驾驶电信网络解决方案[J]. 电信科学, 2019, 35(4): 103-113. |
| [8] | 汤立波,康陈. 车联网产业融合发展趋势[J]. 电信科学, 2019, 35(11): 96-100. |
| [9] | 杨震. 自动驾驶技术进展与运营商未来信息服务架构演进[J]. 电信科学, 2016, 32(8): 16-20. |
| [10] | 李洁. 互联网汽车发展及关键技术分析[J]. 电信科学, 2016, 32(8): 34-38. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
|
||