电信科学 ›› 2012, Vol. 28 ›› Issue (6): 104-108.doi: 10.3969/j.issn.1000-0801.2012.06.026
田安红1,任友俊1,付承彪2
Anhong Tian1,Youjun Ren1,Chengbiao Fu2
摘要:
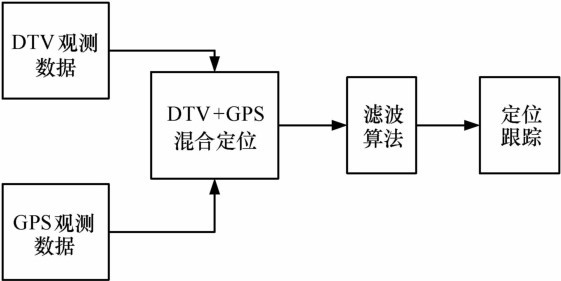
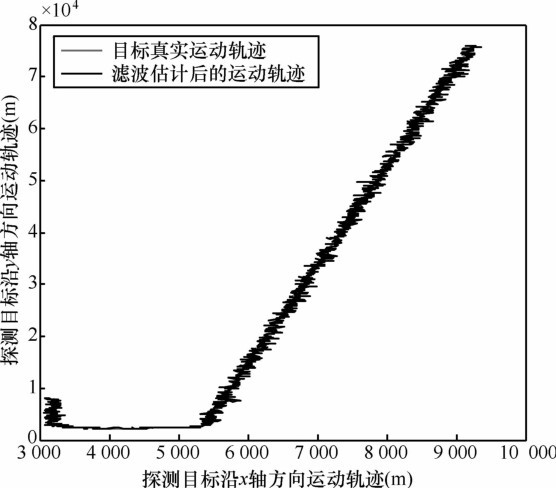
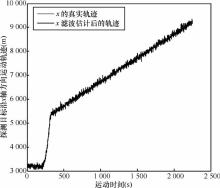
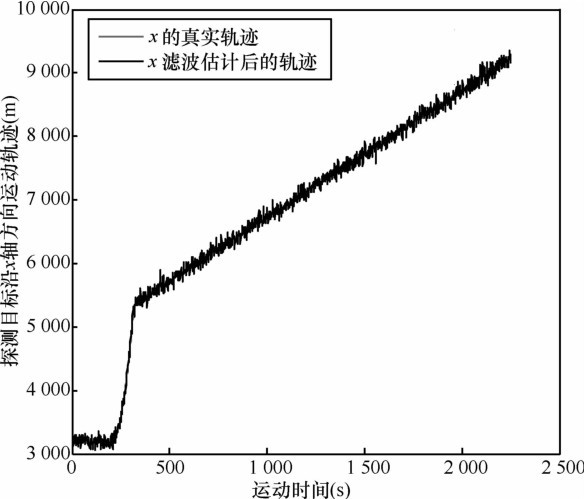
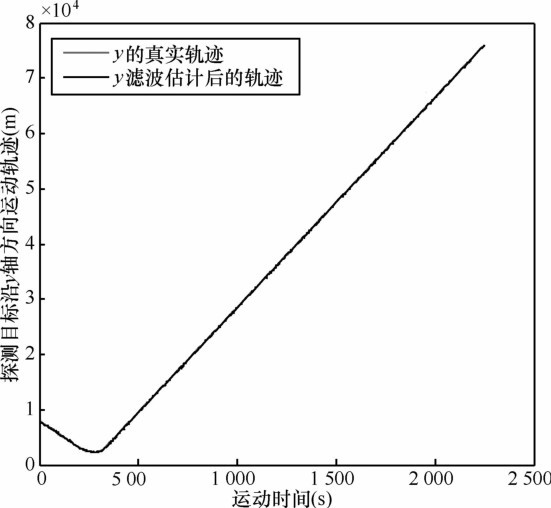
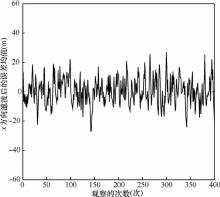
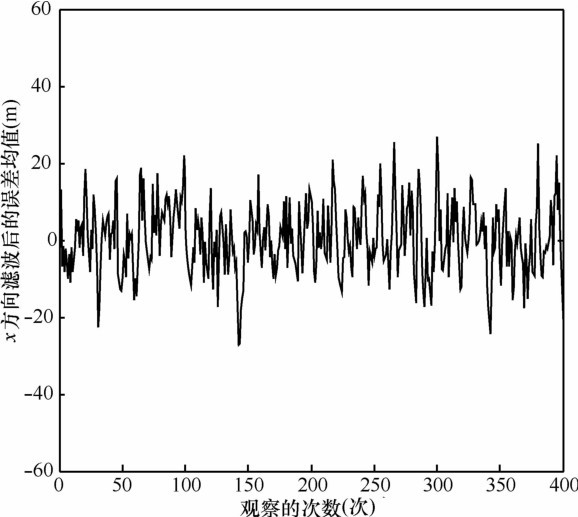
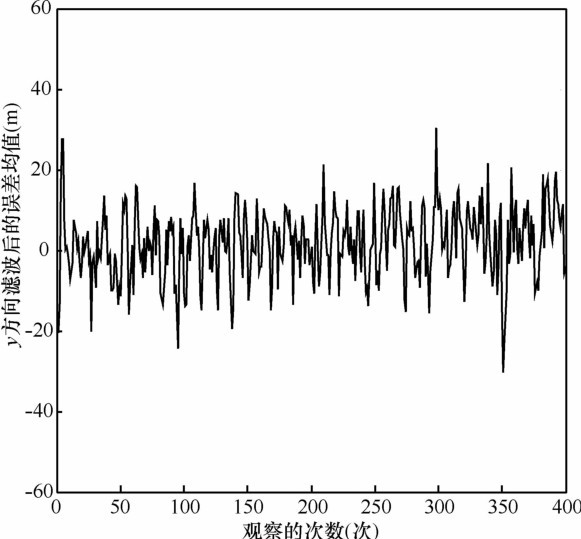
针对边缘地带GPS信号存在盲区而难以准确定位的问题,本文首先采用DTV-GPS混合定位技术来获取目标的位置,然后再设定一种U型山路的机动模型,并利用Kalman滤波算法对该运动目标轨迹进行定位跟踪,最后采用Monte-Carlo方法进行仿真研究。仿真结果表明,Kalman滤波后的轨迹接近真实运动轨迹,误差在10 m左右,符合定位精度标准,从而验证了所设定的轨迹模型与实际场景吻合,同时算法易理解,且仿真滤波过程稳定,具有较快的收敛速度和较高的定位精度,提高了机动目标跟踪的精度和系统的实时性。
|
||