

通信学报 ›› 2024, Vol. 45 ›› Issue (1): 77-93.doi: 10.11959/j.issn.1000-436x.2024001
• 学术论文 • 上一篇
陈亚男1, 李昂2, 吴丹3
修回日期:2023-10-16
出版日期:2024-01-01
发布日期:2024-01-01
作者简介:陈亚男(1998- ),女,山东济南人,南京邮电大学博士生,主要研究方向为多媒体通信、人工智能基金资助:Yanan CHEN1, Ang LI2, Dan WU3
Revised:2023-10-16
Online:2024-01-01
Published:2024-01-01
Supported by:摘要:
针对自动驾驶中风险要素提取不充分、风险场景评估鲁棒性低等问题,提出一种基于六维语义空间的风险评估框架,包括基于六维语义空间的风险要素提取和基于知识图谱的风险场景评估。前者构建六维语义空间并将RGB和红外数据映射其中,利用模态间的关联提取丰富的数据特征,以获得显在和潜在的风险要素。后者通过语义角色标注和实体融合将风险要素凝练为知识图谱,并联合节点补全和风险等级函数设计知识图谱推理方法,实现准确的风险评估。仿真结果表明,较现有的MSMatch和iSQRT-COV-Net方法,所提方法在准确率、漏/虚警率和处理时间上均有优势。
中图分类号:
陈亚男, 李昂, 吴丹. 基于六维语义空间的自动驾驶风险评估研究[J]. 通信学报, 2024, 45(1): 77-93.
Yanan CHEN, Ang LI, Dan WU. Risk assessment of autonomous vehicle based on six-dimensional semantic space[J]. Journal on Communications, 2024, 45(1): 77-93.

图1
自动驾驶场景中的驾驶行为调整"
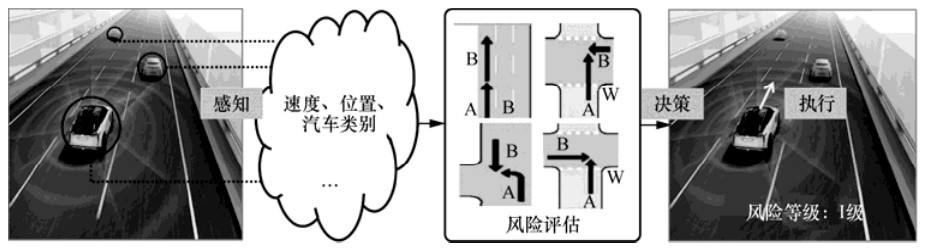
图2
基于六维语义空间的风险评估框架"
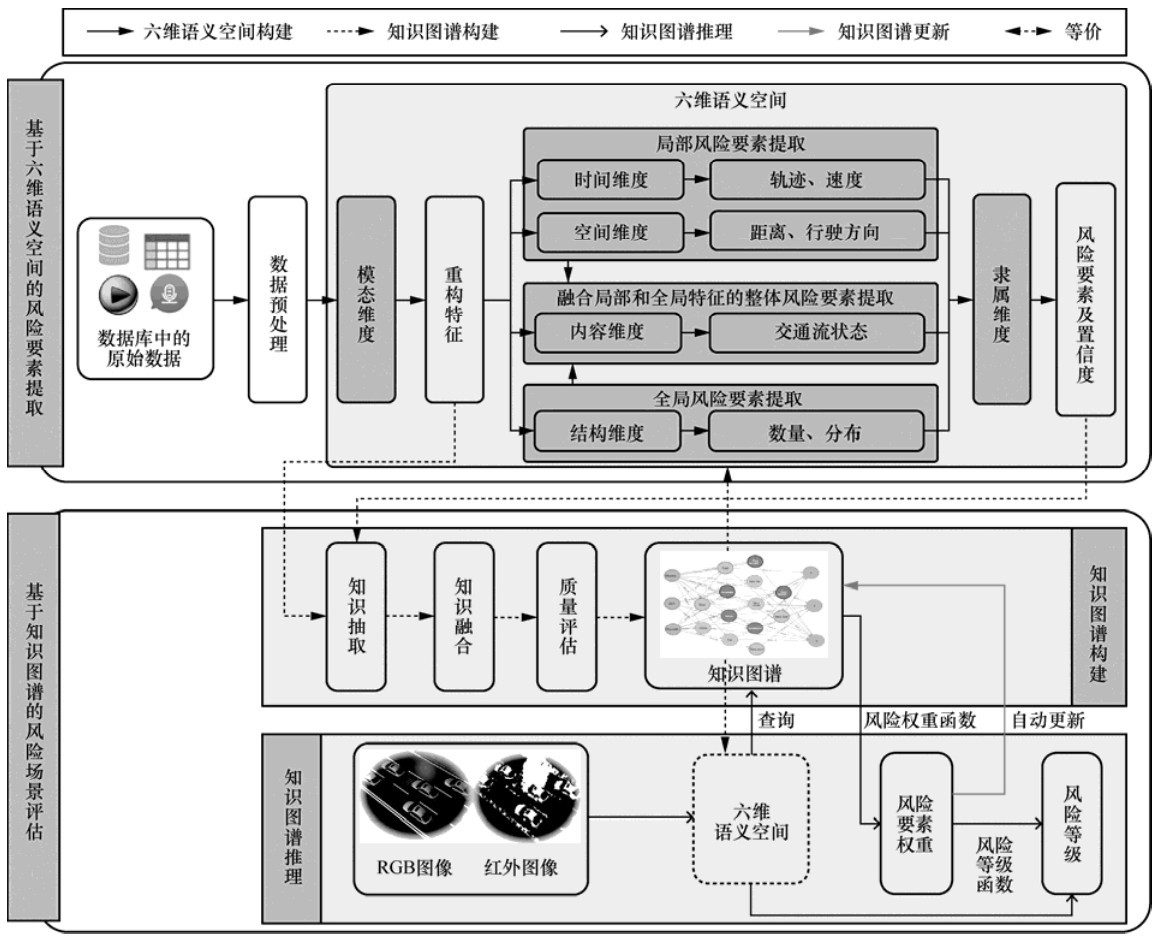
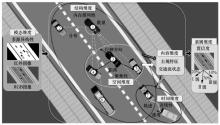
图3
六维语义空间"
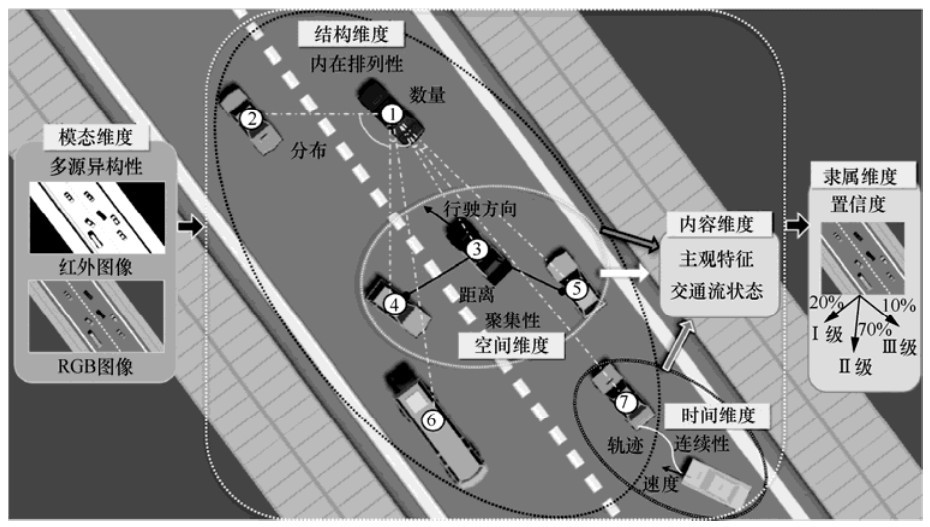
图4
基于LSTM的轨迹预测模型"
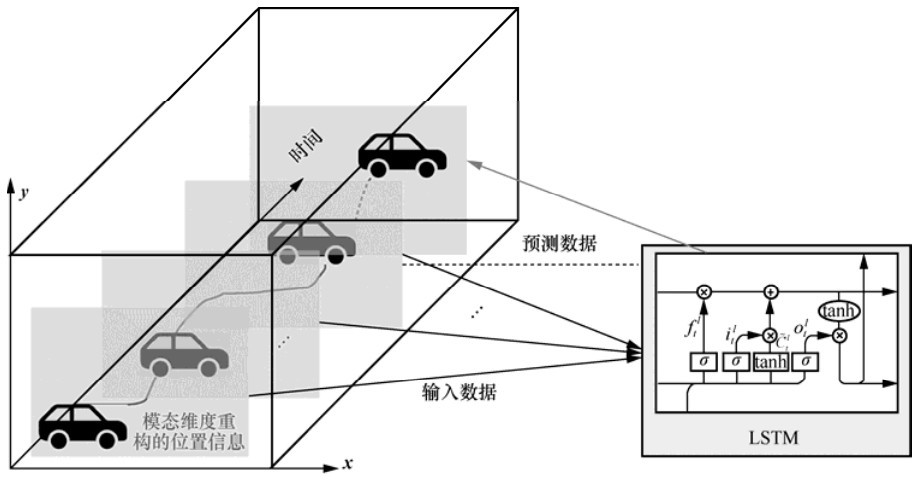
图5
汽车行驶方向说明"
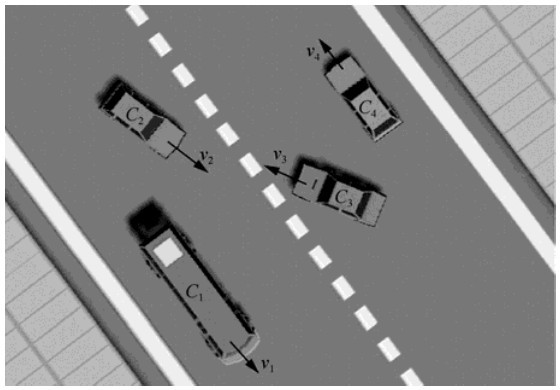
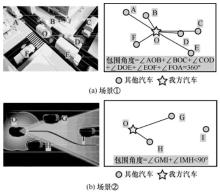
图6
汽车分布计算说明"
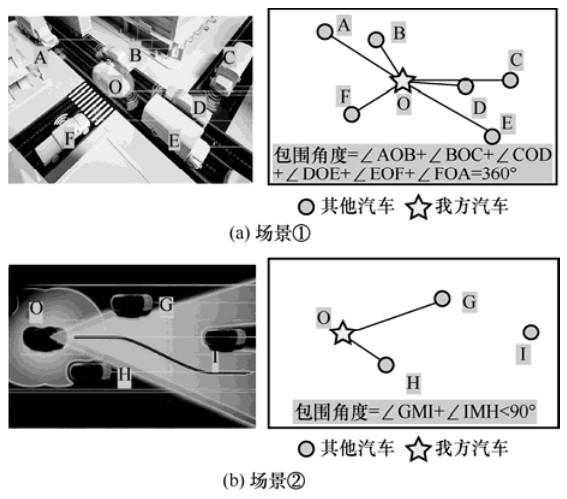
表1
投票机制中不同方法对比"
| 方法 | 原理 | 输入 |
| 隐马尔可夫模型 | 统计学方法 | 时间维度、空间维度、结构维度 |
| 人工势场模型 | 物理学方法 | 模态维度 |
| 动态时空图卷积网络 | 人工智能方法 | 时间维度、空间维度 |
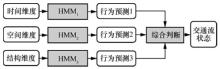
图7
基于HMM的交通流状态识别"
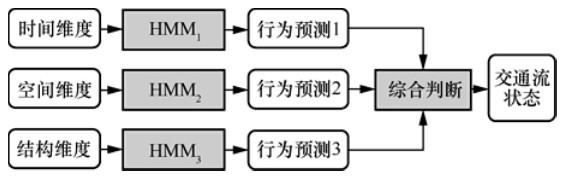
图8
人工势场与电势场模型对比"
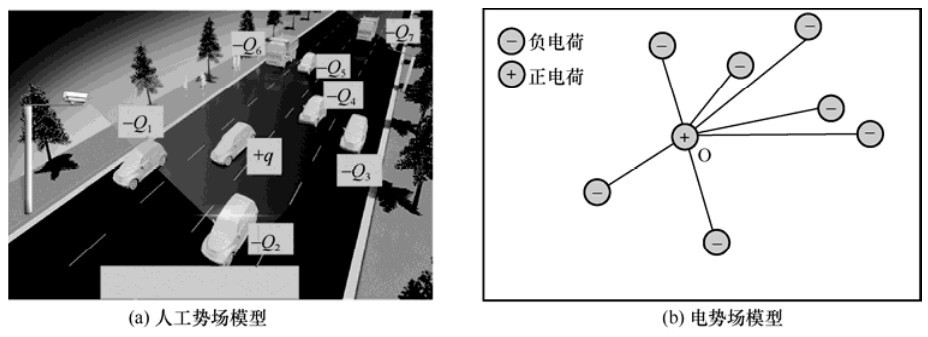
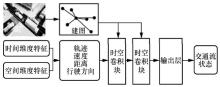
图9
基于动态时空图卷积的交通流状态识别"
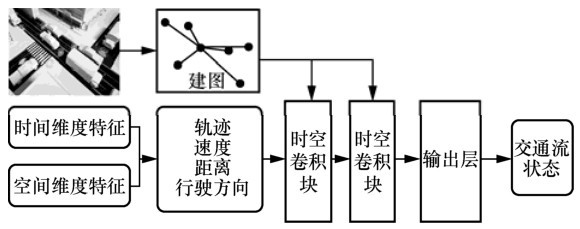
图10
知识图谱构建"
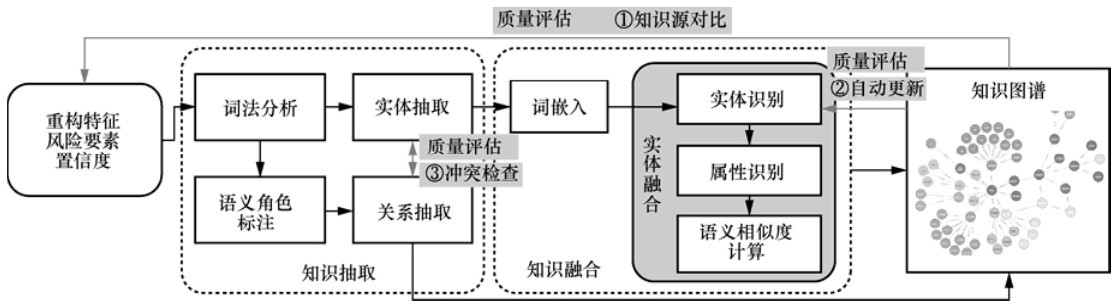
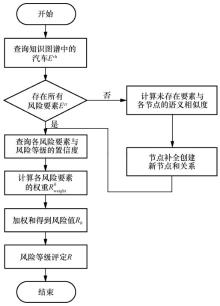
图11
知识图谱推理流程"
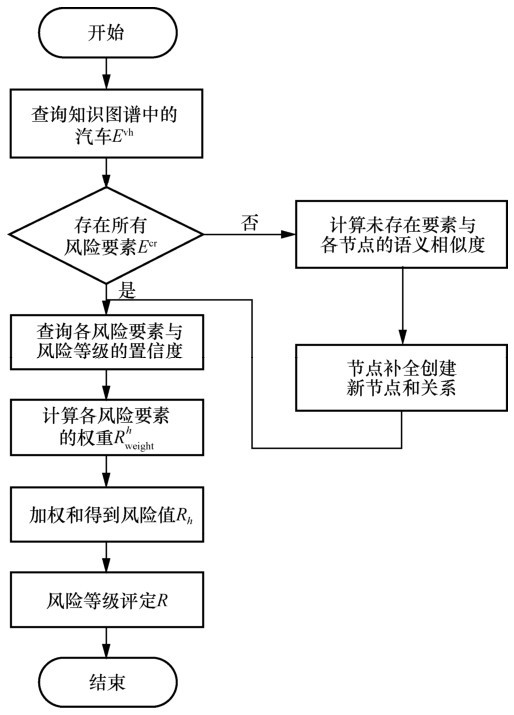
图12
模型训练过程的损失函数优化曲线(学习率为0.01)"
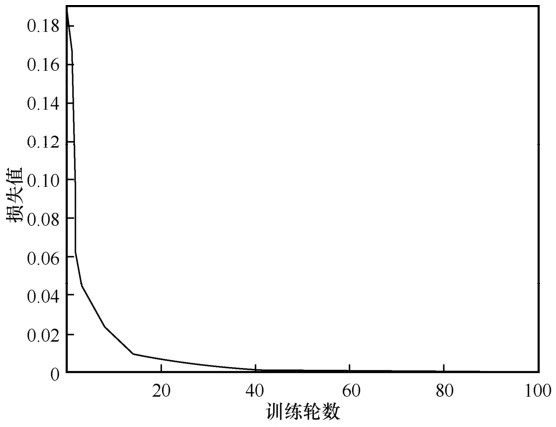
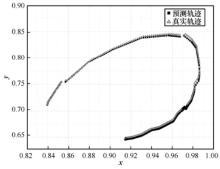
图13
轨迹预测结果"
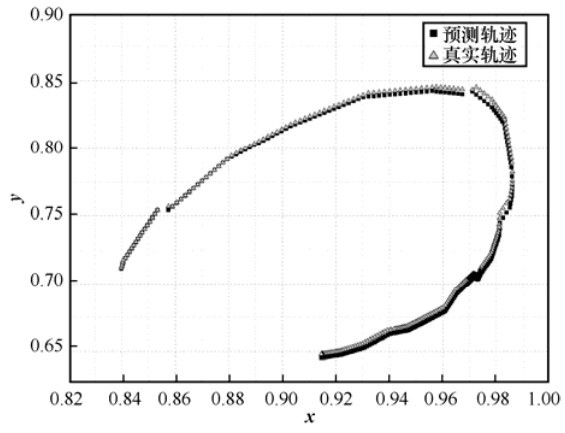
图14
模型训练过程的损失函数优化曲线(学习率为0.003)"
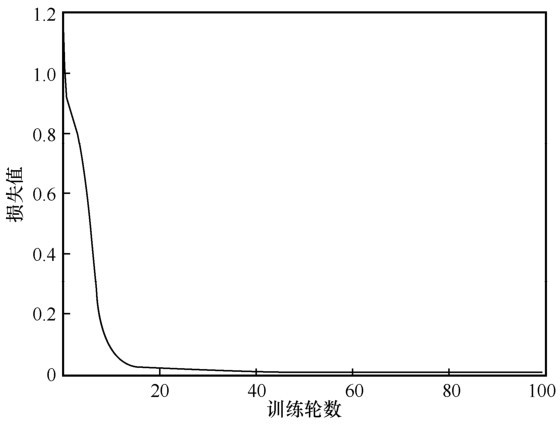
表2
交通流状态识别结果"
| 数据类型 | 场景 | 隐马尔可夫模型 | 人工势场模型 | 动态时空图卷积网络 | 识别结果 |
| 正常 |  | 拥堵 | 通畅 | 拥堵 | 拥堵 |
| 正常 |  | 通畅 | 通畅 | 通畅 | 通畅 |
| 正常 |  | 通畅 | 拥堵 | 通畅 | 通畅 |
| 正常 |  | 通畅 | 拥堵 | 拥堵 | 拥堵 |
| 异常 |  | 通畅 | 拥堵 | 拥堵 | 拥堵 |
| 异常 |  | 通畅 | 拥堵 | 拥堵 | 拥堵 |
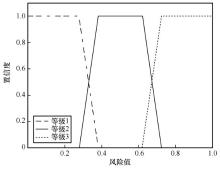
图15
基于置信度的等级划分结果"
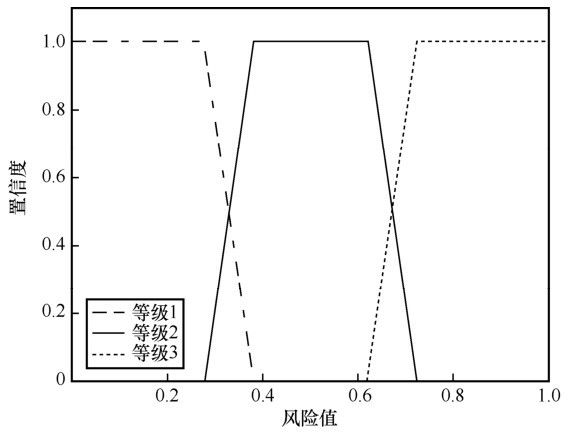
表3
各风险要素的结果"
| 场景 | 风险要素 | 模糊评价(置信度) | 无模糊评价 |
 | 轨迹 | 准确(1) | 准确 |
| 速度 | 慢速(0.35),标准(0.65) | 标准 | |
| 距离 | 较近(1) | 较近 | |
| 方向 | 角度小(1) | 角度小 | |
| 数量 | 多(0.53),中等(0.47) | 多 | |
| 分布 | 未包围(0.94),半包围(0.06) | 未包围 | |
| 交通流 | 拥堵(0.33),通畅(0.67) | 通畅 | |
 | 轨迹 | 准确(1) | 准确 |
| 速度 | 标准(0.13),快速(0.87) | 标准 | |
| 距离 | 较近(1) | 较近 | |
| 方向 | 角度中等(1) | 角度中等 | |
| 数量 | 多(0.53),中等(0.47) | 多 | |
| 分布 | 未包围(1) | 未包围 | |
| 交通流 | 拥堵(0.33),通畅(0.67) | 通畅 |

图16
自动驾驶风险评估知识图谱"
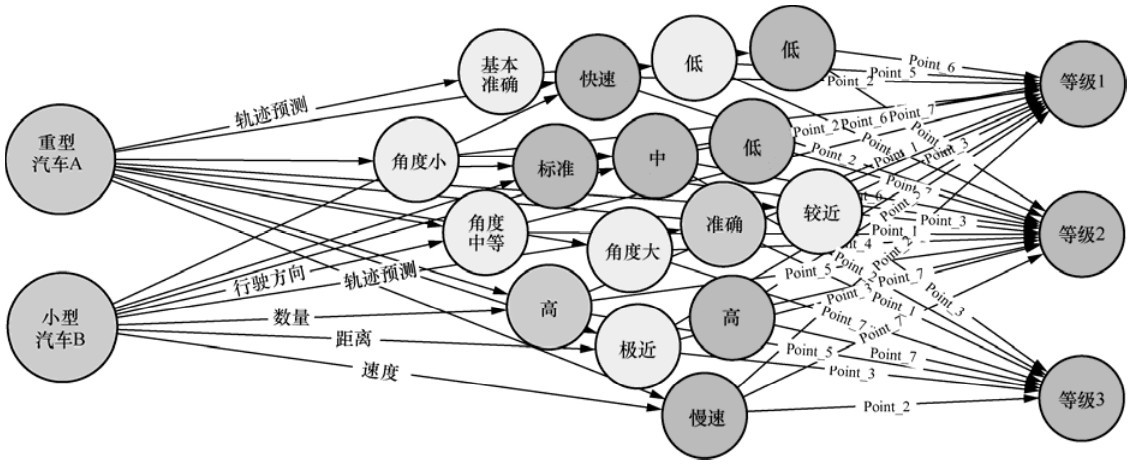
表4
知识图谱推理对比实验结果"
| 方法 | 准确率 | 漏/虚警率 | 处理时间/s |
| MSMatch | 92.7% | 7.6% | 0.345 |
| iSQRT-COV-Net | 90.0% | 16.7% | 0.119 |
| 本文所提方法 | 96.2% | 6.0% | 0.203 |
| [1] | HUANG Y J , DU J T , YANG Z R ,et al. A survey on trajectory-prediction methods for autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2022,7(3): 652-674. |
| [2] | 国家发改委, 中央网信办, 工信部,等. 智能汽车创新发展战略[R]. 2020. |
| National Development, Reform Commission, Central Cyberspace Administration,Ministry of Industry and Information Technology,et al. Smart car innovation development strategy[R]. 2020. | |
| [3] | SHI X P , WONG Y D , CHAI C ,et al. An automated machine learning (AutoML) method of risk prediction for decision-making of autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2021,22(11): 7145-7154. |
| [4] | 田思波, 樊晓旭 . 自动驾驶测试场景标准体系建设的研究和思考[J]. 中国标准化, 2020(4): 87-91. |
| TIAN S B , FAN X X . Research and thoughts on establishing the standards system of autonomous driving test scenario[J]. China Standardization, 2020(4): 87-91. | |
| [5] | 王若萱, 吴建平, 徐辉 . 自动驾驶汽车感知系统仿真的研究及应用综述[J]. 系统仿真学报, 2022,34(12): 2507-2521. |
| WANG R X , WU J P , XU H . Overview of research and application on autonomous vehicle oriented perception system simulation[J]. Journal of System Simulation, 2022,34(12): 2507-2521. | |
| [6] | 吕品, 许嘉, 李陶深 ,等. 面向自动驾驶的边缘计算技术研究综述[J]. 通信学报, 2021,42(3): 190-208. |
| LYU P , XU J , LI T S ,et al. Survey on edge computing technology for autonomous driving[J]. Journal on Communications, 2021,42(3): 190-208. | |
| [7] | LI J X , YUAN L , ZHANG C ,et al. Fuzzy dynamic Bayesian network based threat assessment model for space targets[C]// Proceedings of 2022 5th International Conference on Pattern Recognition and Artificial Intelligence (PRAI). Piscataway:IEEE Press, 2022: 1176-1181. |
| [8] | LIU D P , WANG X , CAI Y ,et al. A novel framework of real-time regional collision risk prediction based on the RNN approach[J]. Journal of Marine Science and Engineering, 2020,8(3): 224. |
| [9] | KOKKOTIS C , MOUSTAKIDIS S , GIAKAS G ,et al. Identification of risk factors and machine learning-based prediction models for knee osteoarthritis patients[J]. Applied Sciences, 2020,10(19): 6797. |
| [10] | HUANG Z Y , LV C , XING Y ,et al. Multi-modal sensor fusionbased deep neural network for end-to-end autonomous driving with scene understanding[J]. IEEE Sensors Journal, 2021,21(10): 11781-11790. |
| [11] | MOZAFFARI S , AL-JARRAH O Y , DIANATI M ,et al. Deep learning-based vehicle behavior prediction for autonomous driving applications:a review[J]. IEEE Transactions on Intelligent Transportation Systems, 2022,23(1): 33-47. |
| [12] | BHALLA S , GANAPATHI S S , CROWLEY M . Deep multi agent reinforcement learning for autonomous driving[C]// Proceedings of Canadian Conference on Artificial Intelligence. Berlin:Springer, 2020: 67-78. |
| [13] | YU M Y , VASUDEVAN R , JOHNSON-ROBERSON M . Occlusion-aware risk assessment for autonomous driving in urban environments[J]. IEEE Robotics and Automation Letters, 2019,4(2): 2235-2241. |
| [14] | DAHL J , DE CAMPOS G R , OLSSON C ,et al. Collision avoidance:a literature review on threat-assessment techniques[J]. IEEE Transactions on Intelligent Vehicles, 2019,4(1): 101-113. |
| [15] | PATIL U , RENZAGLIA A , PAIGWAR A ,et al. Real-time collision risk estimation based on stochastic reachability spaces[C]// Proceedings of 2021 20th International Conference on Advanced Robotics (ICAR). Piscataway:IEEE Press, 2022: 216-221. |
| [16] | LI D F , XIAO B , LIN S Y . Lane departure risk assessment for hands-free driving functions[C]// Proceedings of 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI). Piscataway:IEEE Press, 2022: 1-6. |
| [17] | ZHU J C , QIN S H , WANG W S ,et al. Probabilistic trajectory prediction for autonomous vehicles with attentive recurrent neural process[J]. arXiv Preprint,arXiv:1910.08102, 2019. |
| [18] | ZHANG X , MAHADEVAN S . Bayesian neural networks for flight trajectory prediction and safety assessment[J]. Decision Support Systems, 2020,131:113246. |
| [19] | CUI H G , RADOSAVLJEVIC V , CHOU F C ,et al. Multimodal trajectory predictions for autonomous driving using deep convolutional networks[C]// Proceedings of 2019 International Conference on Robotics and Automation (ICRA). Piscataway:IEEE Press, 2019: 2090-2096. |
| [20] | CAI P D , SUN Y X , WANG H L ,et al. VTGNet:a vision-based trajectory generation network for autonomous vehicles in urban environments[J]. IEEE Transactions on Intelligent Vehicles, 2021,6(3): 419-429. |
| [21] | CAI Y F , WANG Z H , WANG H ,et al. Environment-attention network for vehicle trajectory prediction[J]. IEEE Transactions on Vehicular Technology, 2021,70(11): 11216-11227. |
| [22] | SHEEHAN B , MURPHY F , MULLINS M ,et al. Connected and autonomous vehicles:a cyber-risk classification framework[J]. Transportation Research Part A:Policy and Practice, 2019,124: 523-536. |
| [23] | BABISCH S , NEUROHR C , WESTHOFEN L ,et al. Leveraging the GIDAS database for the criticality analysis of automated driving systems[J]. Journal of Advanced Transportation, 2023,2023: 1-25. |
| [24] | LI A , WEI X , WU D ,et al. Cross-modal semantic communications[J]. IEEE Wireless Communications, 2022,29(6): 144-151. |
| [25] | 李昂, 陈建新, 魏昕 ,等. 面向6G的跨模态信号重建技术[J]. 通信学报, 2022,43(6): 28-40. |
| LI A , CHEN J X , WEI X ,et al. 6G-oriented cross-modal signal reconstruction technology[J]. Journal on Communications, 2022,43(6): 28-40. | |
| [26] | ZHOU L , WU D , WEI X ,et al. Cross-modal stream scheduling for eHealth[J]. IEEE Journal on Selected Areas in Communications, 2021,39(2): 426-437. |
| [27] | GAO Y , NI S X , WU D ,et al. Edge-based cross-modal communications for remote healthcare[J]. IEEE Journal on Selected Areas in Communications, 2022,40(11): 3139-3151. |
| [28] | ZHOU L , WU D , CHEN J X ,et al. Cross-modal collaborative communications[J]. IEEE Wireless Communications, 2020,27(2): 112-117. |
| [29] | DOSOVITSKIY A , BEYER L , KOLESNIKOV A ,et al. An image is worth 16x16 words:transformers for image recognition at scale[J]. arXiv Preprint,arXiv:2010.11929, 2020. |
| [30] | SHU P , CHEN C B , CHEN B H ,et al. Trajectory prediction of UAV based on LSTM[C]// Proceedings of 2021 2nd International Conference on Big Data & Artificial Intelligence & Software Engineering (ICBASE). Piscataway:IEEE Press, 2022: 448-451. |
| [31] | ROSSI L , PAOLANTI M , PIERDICCA R ,et al. Human trajectory prediction and generation using LSTM models and GANs[J]. Pattern Recognition, 2021,120:108136. |
| [32] | 常天庆, 赵立阳, 郭理彬 ,等. 坦克战+321 场环境多目标威胁评估方法研究[J]. 兵器装备工程学报, 2019,40(5): 88-93. |
| CHANG T Q , ZHAO L Y , GUO L B ,et al. Multi target threat assessment method for tank battlefield environment[J]. Journal of Sichuan Ordnance, 2019,40(5): 88-93. | |
| [33] | LI L H , GAN J , JI X K ,et al. Dynamic driving risk potential field model under the connected and automated vehicles environment and its application in car-following modeling[J]. IEEE Transactions on Intelligent Transportation Systems, 2022,23(1): 122-141. |
| [34] | GUI X Y , TODA K , SEO S H ,et al. “I am going this way”:gazing eyes on self-driving car show multiple driving directions[C]// Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications. New York:ACM Press, 2022: 319-329. |
| [35] | 李雅欣 . 基于路面参数融合估计的智能越野汽车行驶风险评估研究[D]. 长春:吉林大学, 2022. |
| LI Y X . Research on driving risk assessment of intelligent off-road vehicles based on road parameter fusion estimation[D]. Changchun:Jilin University, 2022. | |
| [36] | ENDSLEY M R . Toward a theory of situation awareness in dynamic systems[J]. Human Factors:the Journal of the Human Factors and Ergonomics Society, 1995,37(1): 32-64. |
| [37] | RABINER L R . A tutorial on hidden Markov models and selected applications in speech recognition[J]. Proceedings of the IEEE, 1989,77(2): 257-286. |
| [38] | KIPF T N , WELLING M . Semi-supervised classification with graph convolutional networks[J]. arXiv Preprint,arXiv:1609.02907, 2016. |
| [39] | RATHEE G , GARG S , KADDOUM G ,et al. TrustSys:trusted decision making scheme for collaborative artificial intelligence of things[J]. IEEE Transactions on Industrial Informatics, 2023,19(1): 1059-1068. |
| [40] | 叶琪, 张一乾, 阮彤 ,等. 基于语义和结构置信度的知识图谱质量校验方法[J]. 计算机工程, 2023,49(5): 48-55. |
| YE Q , ZHANG Y Q , RUAN T ,et al. Quality verification method for knowledge graph based on semantic and structural trustworthiness[J]. Computer Engineering, 2023,49(5): 48-55. | |
| [41] | SADHU A , GUPTA T , YATSKAR M ,et al. Visual semantic role labeling for video understanding[C]// Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway:IEEE Press, 2021: 5585-5596. |
| [42] | MIKOLOV T , CHEN K , CORRADO G ,et al. Efficient estimation of word representations in vector space[J]. arXiv Preprint,arXiv:1301.3781, 2013. |
| [43] | 张行, 董荣果, 张亮 ,等. 基于知识图谱的质量问题知识库建设研究[J]. 中国标准化, 2022(17): 178-181. |
| ZHANG H , DONG R G , ZHANG L ,et al. Study on the construction of knowledge base of quality issues based on knowledge graph theory[J]. China Standardization, 2022(17): 178-181. | |
| [44] | 吴国栋, 刘涵伟, 何章伟 ,等. 知识图谱补全技术研究综述[J]. 小型微型计算机系统, 2023,44(3): 471-482. |
| WU G D , LIU H W , HE Z W ,et al. Review of knowledge graph completion technology[J]. Journal of Chinese Computer Systems, 2023,44(3): 471-482. | |
| [45] | MADDERN W , PASCOE G , LINEGAR C ,et al. 1 year,1000 km:the Oxford RobotCar dataset[J]. International Journal of Robotics Research, 2017,36(1): 3-15. |
| [46] | PITROPOV M , GARCIA D E , REBELLO J ,et al. Canadian adverse driving conditions dataset[J]. The International Journal of Robotics Research, 2021,40(4/5): 681-690. |
| [47] | GóMEZ P , MEONI G . MSMatch:semisupervised multispectral scene classification with few labels[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021,14: 11643-11654. |
| [48] | LI P H , XIE J T , WANG Q L ,et al. Towards faster training of global covariance pooling networks by iterative matrix square root normalization[C]// Proceedings of 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway:IEEE Press, 2018: 947-955. |
| [1] | 李荣鹏, 汪丙炎, 张宏纲, 赵志峰. 知识增强的语义通信接收端设计[J]. 通信学报, 2023, 44(6): 70-76. |
| [2] | 徐泽汐, 庄雷, 张坤丽, 桂明宇. 基于知识图谱的服务功能链在线部署算法[J]. 通信学报, 2022, 43(8): 41-51. |
| [3] | 孙佳琛, 王金龙, 丁国如, 陈瑾, 龚玉萍. 频谱知识图谱:面向未来频谱管理的智能引擎[J]. 通信学报, 2021, 42(5): 1-12. |
| [4] | 赵晓娟, 贾焰, 李爱平, 陈恺. 基于层级注意力机制的链接预测模型研究[J]. 通信学报, 2021, 42(3): 36-44. |
| [5] | 罗智勇,杨旭,刘嘉辉,许瑞. 基于贝叶斯攻击图的网络入侵意图分析模型[J]. 通信学报, 2020, 41(9): 160-169. |
| [6] | 王新宇,牛犇,李凤华,贺坤. APP隐私泄露风险评估与保护方案[J]. 通信学报, 2019, 40(5): 13-23. |
| [7] | 刘浩,张连明,陈志刚. P2P网络中基于模糊理论的任务访问控制模型[J]. 通信学报, 2017, 38(2): 44-52. |
| [8] | 王晓阳,郑骁庆,肖仰华. 智慧搜索中的实体与关联关系建模与挖掘[J]. 通信学报, 2015, 36(12): 178-189. |
| [9] | 陈曦,田有亮,马卓,马建峰. 商业银行移动支付安全研究[J]. 通信学报, 2014, 35(Z2): 131-139. |
| [10] | 陈 曦,田有亮,马 卓,马建峰. 商业银行移动支付安全研究[J]. 通信学报, 2014, 35(Z2): 18-139. |
| [11] | 高翔,祝跃飞,刘胜利,费金龙,刘龙. 基于模糊Petri网的网络风险评估模型[J]. 通信学报, 2013, 34(Z1): 16-132. |
| [12] | 高翔,祝跃飞,刘胜利,费金龙,刘龙. 基于模糊Petri网的网络风险评估模型[J]. 通信学报, 2013, 34(Z1): 126-132. |
| [13] | 杨君刚1,梁礼2,刘故箐1,张倩1,张长青2. 在线监测的路由器安全威胁态势量化评估方法[J]. 通信学报, 2013, 34(11): 8-70. |
| [14] | 杨君刚,梁礼,刘故箐,张倩,张长青. 在线监测的路由器安全威胁态势量化评估方法[J]. 通信学报, 2013, 34(11): 59-70. |
| [15] | 宋彪,朱建明. 基于业务流程的ERP信息安全进化熵的风险评估[J]. 通信学报, 2012, 33(Z1): 210-215. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
|
||