1 引言
自从生物物理学家Hopfield[1 ] 在20世纪80年代首次提出人工神经网络以来,人工神经网络得到了广泛的研究。如今,人工神经网络在联想记忆、图像处理、优化组合等方面得到了广泛的应用[2 ,3 ,4 ,5 ] 。在这些领域对人工神经网络系统的稳定性进行研究是十分必要的[6 ,7 ,8 ] 。
近年来,随着数域的扩张,人工神经网络主要有实数神经网络、复数神经网络以及四元数神经网络。四元数由一个实部和3个虚部构成,四元数对数据信息的存储能力比实数和复数都要强。一个四元数的数据存储能力是一个实数的4倍,是一个复数的2倍。因此,四元数神经网络在处理高维数据时比实数神经网络以及复数神经网络都更有优势。例如,在与图像有关的应用中,一种颜色往往由红色(R)、绿色(G)和蓝色(B)3种基本颜色按照各自的像素值合成,将 R、G、B 值分别对应于纯四元数的3个虚部部分i、j和k的系数时,一种颜色便可以用一个纯虚数唯一表示,一张图片可以用一个纯四元数矩阵唯一表示[9 ,10 ] 。
然而,之前研究的四元数神经网络涉及的四元数是定义在哈密顿(Hamilton)乘法规则之下的,此规则不满足乘法交换律。为了解决这个问题,本文给出了满足乘法交换律的四元数(以下简称交换四元数),它保留了四元数相对于实数及复数的基本优势,即具有更好的数据存储能力。但在新的乘法规则下,对交换四元数神经网络(commutative quaternion valued neural network,CQVNN)的研究也面临着许多挑战,例如:交换四元数同时存在 3个共轭,交换四元数的模表示十分复杂,交换四元数不满足三角不等式等。这些局限使得那些适用于实数、复数以及不可交换四元数的不等式理论不适用于交换四元数。为了解决这些问题,本文通过交换四元数的乘法规则将CQVNN转化为实数神经网络,进而研究其稳定性。
本文的结构组织如下:第2节介绍交换四元数以及交换四元数神经网络,给出一些引理及定义;第3节给出交换四元数神经网络渐近稳定的充分条件;第4节用一个数值案例验证了得到的结论的有效性;第5节对本文进行总结。
2 准备工作
2.1 交换四元数
q = q R + q I i + q J j + q K k ∈ ℚ ( 1 )
其中,qR 、qI 、qJ 、q K ∈ ℝ
{ i 2 = k 2 = − 1 , j 2 = 1 i j = j i = k j k = k j = i k i = i k = − j i j k = − 1 ( 2 )
q ( 1 ) = q R − q I + q J − q K
q ( 2 ) = q R + q I − q J + q K
q ( 3 ) = q R − q I − q J + q K
| | q | | 4 = q q ( 1 ) q ( 2 ) q ( 3 ) =
[ ( q R + q J ) 2 + ( q I + q K ) 2 ] ×
[ ( q R − q J ) 2 + ( q I − q K ) 2 ] ≥ 0
对于另一个交换四元数 p = p R + p I i + p J j + p K k
p q = q p =
( p R q R − p I q I + p J q J − p K q K ) +
( p R q I + p I q R + p J q K + p K q J ) i +
( p R q J + p J q R − p I q K − p K q I ) j +
( p R q K + p K q R + p I q J + p J q I ) k
注 1 此规则定义的四元数乘法虽然满足了乘法交换律,但由此衍生出来的交换四元数的模不满足三角不等式。例如:
q 1 = 1 + j 2 , q 2 = 1 − j 2
而 | | q 1 + q 2 | | = 1 > | | q 1 | | + | | q 2 | | = 0
2.2 四元数神经网络
q ˙ ( t ) = − Cq ( t ) + Af ( q ( t ) ) + Bg ( q ( t − τ ( t ) ) ) + u ( 3 )
其中,q ( t ) = ( q 1 ( t ) , q 2 ( t ) , ⋯ , q n ( t ) ) T ∈ ℚ n C = diag { c 1 , c 2 , ⋯ , c n } ∈ ℝ n c i > 0 ( i = 1 , 2 , ⋯ , n ) A = A R + A I i + A J j + A K k ∈ ℚ n × n B = B R + B I i + B J j + B K k ∈ ℚ n × n f ( q ( t ) ) = ( f 1 ( q 1 ( t ) ) , f 2 ( q 2 ( t ) ) , ⋯ , f n ( q n ( t ) ) ) T ∈ ℚ n g ( q ( t − τ ( t ) ) ) = ( g 1 ( q 1 ( t − τ ( t ) ) ) , g 2 ( q 2 ( t − τ ( t ) ) ) , ⋯ g n ( q n ( t − τ ( t ) ) ) ) T ∈ ℚ n u = u R + u I i + u J j + u K k = ( u 1 , u 2 , ⋯ , u n ) T ∈ ℚ n 0 ≤ τ ( t ) ≤ τ ( τ > 0 )
q ( s ) = φ ( s ) ∈ ℚ n , s ∈ [ t 0 − τ , t 0 ]
φ ( s ) = φ R ( s ) + φ I ( s ) i + φ J ( s ) j + φ K ( s ) k
其中,t0 为式(3)表示的系统的初始时间,τ为时滞项τ(t)的上界,φ ( s )
假设1 设q ( t ) = q R ( t ) + q I ( t ) i + q J ( t ) j + q K ( t ) k R (t)、qI (t)、qJ (t)、q K ( t ) ∈ ℝ m ( m = 1 , 2 , ⋯ , n ) m (q(t))和gm (q(t-τ(t)))能够表示成:
f m ( q ( t ) ) = f m R ( q R ( t ) ) + f m I ( q I ( t ) ) i +
f m J ( q J ( t ) ) j + f m K ( q K ( t ) ) k
g m ( q ( t − τ ( t ) ) ) = g m R ( q R ( t − τ ( t ) ) ) + g m I ( q I ( t − τ ( t ) ) ) i +
g m J ( q J ( t − τ ( t ) ) ) j + g m K ( q K ( t − τ ( t ) ) ) k
其中,f m l ( · ) g m l ( · ) : ℝ n → ℝ n l ∈ { R , I , J , K }
| f m l ( x l ) − f m l ( y l ) | ≤ l m l | x l − y l | ,
| g m l ( x l ) − g m l ( y l ) | ≤ l ˜ m l | x l − y l | , ∀ x l , y l ∈ ℝ n
其中,lm 、l ˜ m
L l = diag{ l 1 l , l 2 l , ⋯ , l n l }, L ˜ l = diag{ l ˜ 1 l , l ˜ 2 l , ⋯ , l ˜ n l }
基于式(2)和假设 1,式(3)可以被重写成如下形式:
q ˙ R ( t ) = − C q R ( t ) + A R f R ( q R ( t ) ) − A I f I ( q I ( t ) ) +
A J f J ( q J ( t ) ) − A K f K ( q K ( t ) ) +
A J f J ( q J ( t ) ) − A K f K ( q K ( t ) ) +
A J f J ( q J ( t ) ) − A K f K ( q K ( t ) ) +
A J f J ( q J ( t ) ) − A K f K ( q K ( t ) ) +
A J f K ( q K ( t ) ) + A K f J ( q J ( t ) ) +
B R g I ( q I ( t − τ ( t ) ) ) + B I g R ( q R ( t − τ ( t ) ) ) +
B J g K ( q K ( t − τ ( t ) ) ) + B K g J ( q J ( t − τ ( t ) ) ) + u I ( 5 )
q ˙ J ( t ) = − C q J ( t ) + A R f J ( q J ( t ) ) − A I f K ( q K ( t ) ) +
q ˙ J ( t ) = − C q J ( t ) + A R f J ( q J ( t ) ) − A I f K ( q K ( t ) ) +
B R g J ( q J ( t − τ ( t ) ) ) − B I g K ( q K ( t − τ ( t ) ) ) +
B J g R ( q R ( t − τ ( t ) ) ) − B K g I ( q I ( t − τ ( t ) ) ) + u J ( 6 )
B J g R ( q R ( t − τ ( t ) ) ) − B K g I ( q I ( t − τ ( t ) ) ) + u J ( 6 )
A J f I ( q I ( t ) ) + A K f R ( q R ( t ) ) +
B R g K ( q K ( t − τ ( t ) ) ) + B I g J ( q J ( t − τ ( t ) ) ) +
B J g I ( q I ( t − τ ( t ) ) ) + B K g R ( q R ( t − τ ( t ) ) ) + u K ( 7 )
Q ˙ ( t ) = − C ^ Q ( t ) + A ^ F ^ ( Q ( t ) ) + B ^ G ^ ( Q ( t − τ ( t ) ) ) + U ( 8 )
A ^ = ( A R − A I A J − A K A I A R A K A J A J − A K A R − A I A K A J A I A R )
B ^ = ( B R − B I B J − B K B I B R B K B J B J − B K B R − B I B K B J B I B R )
Q ( t ) = ( ( q R ( t ) ) T , ( q I ( t ) ) T , ( q J ( t ) ) T , ( q K ( t ) ) T ) T
U = ( ( u R ) T , ( u I ) , ( u J ) , ( u K ) ) T
C ^ = diag { C , C , C , C }
F ^ = ( ( f R ) T , ( f I ) T , ( f J ) T , ( f J ) T ) T
G ^ = ( ( g R ) T ( g I ) T , ( g J ) T , ( g J ) T ) T
| F ^ ( Q l ) − F ^ ( Q ¯ l ) | ≤ L | Q l − Q ¯ l |
| G ^ ( Q l ) − G ^ ( Q ¯ l ) | ≤ L ˜ | Q l − Q ¯ l | , ∀ Q l , Q ¯ l ∈ ℝ 4 n
其中,L =diag{ L R , L I , L J , L K } L ˜ =diag{ L ˜ R , L ˜ I , L ˜ J , L ˜ K }
定义 1 若常数向量q ˜ = ( q ˜ 1 , q ˜ 2 , ⋯ , q ˜ n ) T − C q ˜ + A f ( q ˜ ) + B g ( q ˜ ) + u = 0 q ˜
为了保证式(7)表示的系统有唯一平衡点,需要做如下假设。
假设2 C ^ − | A ^ | L − | B ^ | L ˜
假设 3 设K = C ^ − | A ^ | L − | B ^ | L ˜ K + K T
定理1 如果假设1、假设2成立,则式(8)表示的系统存在唯一的平衡点。
定理2 如果假设1、假设3成立,则式(8)表示的系统存在唯一的平衡点。
证明 通过文献[11 ]中的定理1与定理2,可以直接得到本文的定理1和定理2。
为了更加方便地研究式(8)表示的实数系统,将其系统平衡点平移至原点。假设Q ˜ = ( ( q ˜ R ) T , ( q ˜ I ) , ( q ˜ J ) T ( q ˜ J ) T ) T Q ¯ ( t ) = Q ( t ) − Q ˜
Q ¯ ˙ ( t ) = − C ^ Q ¯ ( t ) + A ^ F ( Q ¯ ( t ) ) + B ^ G ( Q ¯ ( t − τ ( t ) ) ) ( 9 )
其中,F ( Q ¯ ( t ) ) = F ^ ( Q ¯ ( t ) + Q ˜ ) − F ^ ( Q ˜ ) G ( Q ¯ ( t − τ ( t ) ) ) = G ^ ( Q ¯ ( t − τ ( t ) ) + Q ˜ ) − G ^ ( Q ˜ )
显然,式(9)表示的实值系统原点的稳定性与式(8)表示的实值系统及交换四元数神经网络(如式(3)所示)的平衡点的稳定性是等价的。
定义2 若对于任意给定的ε>0,都能找到正数δ = δ ( ε , t 0 ) | | x 0 | | < δ 0 时,式(9)的解Q ¯ ( t ) = Q ¯ ( t , t 0 , x 0 ) | | Q ¯ ( t , t 0 , x 0 ) | | < ε
定义 3 设U是| | Q ¯ ( t , t 0 , x 0 ) | | < ε 0 ∈U和任意给定的ε>0,都能找到正数T = T ( ε , t 0 , x 0 ) 0 +T时,式(9)的解Q ¯ ( t ) = Q ¯ ( t , t 0 , x 0 ) | | Q ¯ ( t , t 0 , x 0 ) | | < ε
定义4 若式(9)的零解既是稳定的又是吸引的,则称式(9)的零解是渐近稳定的;若式(9)的零解的吸引域是整个ℝ n
注2 经过变换后,式(9)的平衡点平移至原点,此时称系统的解为零解。利用极限的形式可以给出式(9)的零解稳定和吸引的直观描述为:
当对于一切t>t0 ,lim x 0 → 0 x ( t , t 0 , x 0 ) = 0
当对于一切的x0 ∈U, lim t → ∞ x ( t , t 0 , x 0 ) = 0
引理1 对于任意a , b ∈ ℝ n P
a T b + b T a ≤ a T P a + b T P − 1 b
证明 根据文献[12 ]中的引理2,可以直接得到这个结果。
( i ) S 22 < 0 和 S 11 − S 12 S 22 − 1 S 21 < 0 ,
( ii ) S 11 < 0 和 S 22 − S 21 S 11 − 1 S 12 < 0 。
( ii ) S 11 < 0 和 S 22 − S 21 S 11 − 1 S 12 < 0 。
其中,S 11 T = S 11 S 12 T = S 21 S 22 T = S 22
引理3[13 ] 若在原点的领域U内,存在正定(负定)函数V(t)使得V ˙ ( t )
注 3 无论是在深度学习领域还是在神经网络动力学行为研究领域,考虑比较多的都是实数神经网络或者复数值神经网络,这些神经网络在处理三维或者四维等高维数据时具有一定的局限性。于是,近几年出现了基于Hamilton规则的四元数神经网络,这种神经网络对高维数据的处理具有一定的优势。但是,基于Hamilton规则的四元数不满足乘法交换律,本文给出了可交换的四元数神经网络模型,一定程度上解决了基于Hamilton规则的四元数神经网络具有的局限性。
3 渐进稳定性
本节将基于李雅普诺夫(Lyapunov)稳定性理论给出式(8)表示的系统的唯一平衡点渐近稳定的充分性判据。
定理3 在假设1、2的条件下,如果存在4个正定对角矩阵P 1 P 2 Γ 1 Γ 2
( − C ^ P 1 − P 1 C ^ + P 2 + L Γ 1 L P 1 A ^ P 1 B ^ A ^ T P 1 − Γ 1 0 B ^ T P 1 0 − Γ 2 ) < 0 ( 10 )
L ˜ Γ 2 L ˜ − ( 1 − τ ) P 2 < 0 ( 11 )
V ( t ) = Q ¯ T ( t ) P 1 Q ¯ ( t ) + ∫ t − τ ( t ) t Q ¯ T ( s ) P 2 Q ¯ ( s ) d s
V ˙ ( t ) = Q ¯ ˙ T ( t ) P 1 Q ¯ ( t ) + Q ¯ T ( t ) P 1 Q ¯ ˙ ( t ) +
Q ¯ T ( t ) P 2 Q ¯ ( t ) − ( 1 − τ ˙ ( t ) ) ×
Q ¯ T ( t − τ ( t ) ) P 2 Q ¯ ( t − τ ( t ) ) =
Q ¯ T ( t − τ ( t ) ) P 2 Q ¯ ( t − τ ( t ) ) =
F T ( Q ¯ ( t ) ) A ^ T P 1 Q ¯ ( t ) + Q ¯ T ( t ) P 1 A ^ F ( Q ¯ ( t ) ) +
G T ( Q ¯ ( t − τ ( t ) ) ) B ^ T P 1 Q ¯ ( t ) +
Q ¯ ( t ) P 1 B ^ G T ( Q ¯ ( t − τ ( t ) ) ) −
( 1 − τ ˙ ( t ) ) Q ¯ T ( t − τ ( t ) ) P 2 Q ¯ ( t − τ ( t ) ) ≤
Q ¯ T ( t ) ( − C ^ P 1 − P 1 C ^ + P 2 ) Q ¯ ( t ) +
F T ( Q ¯ ( t ) ) Γ 1 F ( Q ¯ ( t ) ) +
Q ¯ T ( t ) P 1 A ^ Γ 1 − 1 A ^ T P 1 Q ¯ ( t ) +
G T ( Q ¯ ( t − τ ( t ) ) ) Γ 2 G ( Q ¯ ( t − τ ( t ) ) ) +
Q ¯ T ( t ) P 1 B ^ Γ 1 − 1 B ^ T P 1 Q ¯ ( t ) − ( 1 − τ ) ×
Q ¯ T ( t − τ ( t ) ) P 2 Q ¯ ( t − τ ( t ) ) ≤
Q ¯ T ( t ) ( − C ^ P 1 − P 1 C ^ + P 2 +
P 1 A ^ Γ 1 − 1 A ^ T P + P 1 B ^ Γ 1 − 1 B ^ T P 1 ) Q ¯ ( t ) +
Q ¯ T ( t − τ ( t ) ) ( L ˜ Γ 2 L ˜ − ( 1 − τ ) P 2 ) Q ¯ ( t − τ ( t ) )
根据引理 2 和式(10)得出− C ^ P 1 − P 1 C ^ + P 2 + P 1 A ^ Γ 1 − 1 A ^ T P + P 1 B ^ Γ 1 − 1 B ^ T P < 0
4 案例分析
为了验证定理3得到的稳定性判据的有效性,本节将选择一个符合定理 3 的系统案例,并通过Matlab绘制其解曲线并观察解的轨迹,进而判定本文所得结果的有效性。另外,考虑到现实中噪声的影响,在案例2中对系统的连接权以及系统的外部输入项添加一个正态分布的(0,1)噪声,然后观察分析系统解曲线的性态。
q ˙ ( t ) = − C q ( t ) + A f ( q ( t ) ) + B g ( q ( t − τ ( t ) ) ) + u ( 12 )
其中,A = ( a i j ) 2 × 2 B = ( b i j ) 2 × 2
a 11 = − 0.1 − 0.4 i − 0.1 j − 0.5 k ,
a 12 = − 0.4 + 0.2 i − 0.4 j + 0.2 k ,
a 21 = − 0.3 + 0.1 i − 0.2 j + 0.1 k ,
a 22 = − 0.6 − 0.1 i − 0.2 j − 0.1 k ,
b 11 = 0.2 − 0.1 i + 0.1 j + 0.1 k ,
b 12 = 0.2 + 0.1 i − 0.2 j − 0.3 k ,
b 12 = 0.2 + 0.1 i − 0.2 j − 0.3 k ,
b 22 = 0.3 − 0.3 i + 0.1 j + 0.2 k ,
C = diag { 4 , 4 } , τ ( t ) = 0.5 sin 2 ( t ) ,
f ( q ( t ) ) = tanh ( q R ( t ) ) + tanh ( q I ( t ) ) i +
tanh ( q J ( t ) ) j + tanh ( q K ( t ) ) k ,
g ( q ( t ) ) = tanh ( q R ( t ) ) + tanh ( q I ( t ) ) i +
tanh ( q J ( t ) ) j + tanh ( q K ( t ) ) k 。
取L l = L ˜ l = diag { 1 , 1 } l ∈ { R , I , J , K } C ^ − | A ^ | L − | B ^ | L ˜ C ^ − | A ^ | L − | B ^ | L ˜ C ^ − | A ^ | L − | B ^ | L ˜ P 1 P 2 Γ 1 Γ 2
P 1 =diag { P 11 , P 11 , P 11 , P 11 }
P 2 =diag { P 22 , P 22 , P 22 , P 22 }
Γ 1 =diag { Γ 11 , Γ 11 , Γ 11 , Γ 11 }
Γ 2 =diag { Γ 22 , Γ 22 , Γ 22 , Γ 22 }
P 11 = ( 3.5668 0 0 3.6169 )
P 22 = ( 11.9318 0 0 12.0776 )
Γ 11 = ( 8.3862 0 0 8.4712 )
Γ 22 = ( 4.8406 0 0 4.8649 )
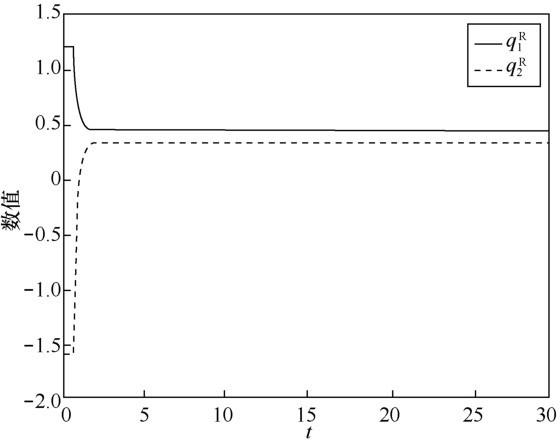
通过定理 3,可以得到式(12)表示的系统是渐近稳定的。这里选取系统的初始值为:
q ( s ) = ( 1.2 − 1.3 i + 1.4 j + 1.9 k − 1.6 + 1.8 i − 15 j − 1.6 k )
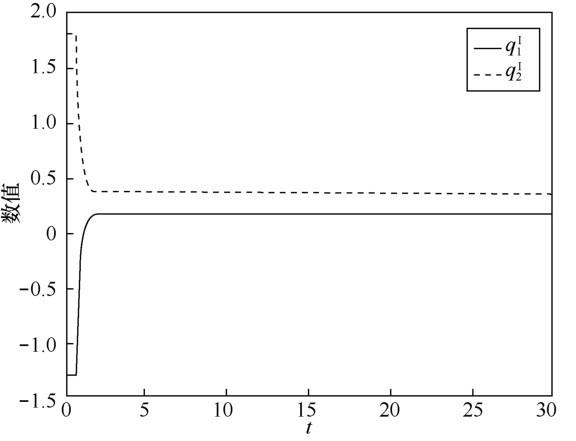
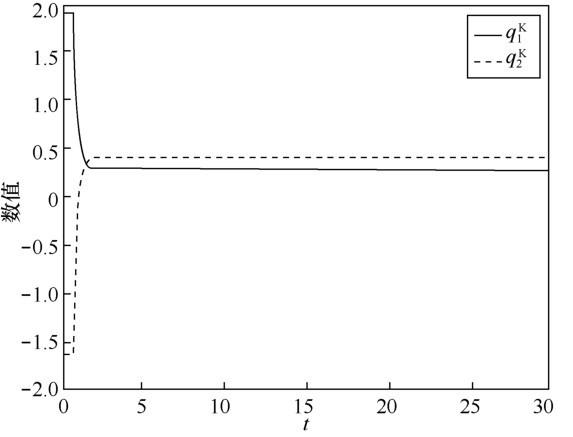
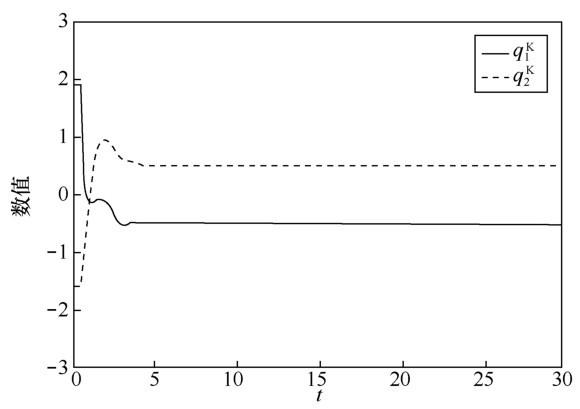
其中,s∈[-0.5,0],图1 ,图2 ,图3 ,图4 展示了所给系统的4 个部分的状态轨迹,这里的状态轨迹是指系统的解曲线,从这4幅图中可以看到每个神经元都收敛到稳定状 态,收敛 点为 q ˜ = ( q ˜ i j ) 2 × 1 q ˜ 11 = 0.439 + 0.186 i + 0.383 j + 0.287 k q ˜ 21 = 0.324 + 0.362 i + 0.274 j + 0.386 k
图1
图2
图3
图4
对案例1中涉及的系统的连接权参数A B u 图5 ~图8 所示,结果显示每一个神经元都收敛于平衡点。可见系统在受到一定噪声干扰时,其稳定性不会受到影响。
图5
图5
二维四元数神经网络第一部分受噪声干扰后的状态轨迹
图6
图6
二维四元数神经网络第二部分受噪声干扰后的状态轨迹
图7
图7
二维四元数神经网络第三部分受噪声干扰后的状态轨迹
图8
图8
二维四元数神经网络第四部分受噪声干扰后的状态轨迹
注 4 按照数据类型,可将神经网络分为实值神经网络、复值神经网络和四元数神经网络。实值神经网络的应用十分广泛,但是它无法高效地处理诸如二维仿射变换或者三维仿射变换等几何变换问题。为了解决这一问题,学者们发现复值神经网络能够将二维空间中的一个点数据建模成一个单独的整体,而不是两个数据单元的集合,这就使得复值神经网络在处理二维数据的仿射变换时,比实值神经网络更为高效快捷。然而,在实际生活中,常常需要处理三维数据,例如,与图像有关的应用、方向预测以及机器人操控等。近年来,学者们发现采用四元数可以直接对高维数据进行编码处理,大幅提升了处理效率,尤其在处理三维空间变换时非常高效简洁。目前四元数神经网络已经在卫星的姿态控制、彩色图像压缩、计算机图像学、彩色微光夜视以及机器人运动控制等诸多领域展现了良好的应用前景[14 ,15 ,16 ,17 ] 。因此,关于四元数神经网络稳定性的研究是十分有意义的。然而,目前研究的四元数神经网络不满足乘法交换律,即存在一定的局限性。本文提出的可交换四元数神经网络在一定程度上解决了这一局限性。目前,关于本文所涉及的交换四元数神经网络的渐近稳定性研究较少,因此本文研究具有一定的创新性。
5 结束语
本文对交换四元数神经网络的渐近稳定性进行了研究。首先介绍了交换四元数的一些基本概念及运算,然后提出了交换四元数的神经网络。考虑到交换四元数具有3个共轭这一事实所带来的各种问题,文中将交换四元数神经网络分解成4个实值神经网络,通过不等式理论、Lyapunov稳定性理论以及拓扑度理论,得到了一些交换四元数神经网络平衡点存在且唯一的充分条件以及平衡点渐近稳定的LMI条件。最后,提供了两个案例来证明所提出的LMI条件的有效性。
The authors have declared that no competing interests exist.
作者已声明无竞争性利益关系。
参考文献
View Option
[1]
HOPFIELD J J . Neural networks and physical systems with emergent collective computational abilities
[J]. Proceedings of the National Academy of Sciences , 1982 ,79 (8 ): 2554 -2558 .
[本文引用: 1]
[2]
ZENG Z , WANG J . Design and analysis of high-capacity associative memories based on a class of discrete-time recurrent neural networks
[J]. IEEE Transactions on Systems Man & Cybernetics Part B Cybernetics:A Publication of the IEEE Systems Man & Cybernetics Society , 2008 ,38 (6 ): 1525 -1536 .
[本文引用: 1]
[3]
TANAKA G , AIHARA K . Complex-valued multistate associative memory with nonlinear multilevel functions for gray-level image reconstruction
[J]. IEEE Transactions on Neural Networks , 2009 ,20 (9 ): 1463 -1473 .
[本文引用: 1]
[4]
CHEN Y H , FANG S C . Neurocomputing with time delay analysis for solving convex quadratic programming problems
[J]. IEEE Transactions on Neural Networks , 2000 ,11 (1 ): 230 -240 .
[本文引用: 1]
[5]
AMIN M F , MURASE K . Single-layered complex-valued neural network for real-valued classification problems
[J]. Neurocomputing , 2009 ,72 (4-6 ): 945 -955 .
[本文引用: 1]
[6]
SONG Q , YAN H , ZHAO Z ,et al . Global exponential stability of complex-valued neural networks with both time-varying delays and impulsive effects
[J]. Neural Networks , 2016 ,79 : 108 -116 .
[本文引用: 1]
[7]
ZHANG H , YANG F , LIU X ,et al . Stability analysis for neural networks with time-varying delay based on quadratic convex combination
[J]. IEEE Transactions on Neural Networks and Learning Systems , 2013 ,24 (4 ): 513 -521 .
[本文引用: 1]
[8]
SONG Q , CHEN X . Multistability analysis of quaternion-valued neural networks with time delays
[J]. IEEE Transactions on Neural Networks and Learning Systems , 2018 ,29 (11 ): 5430 -5440 .
[本文引用: 1]
[9]
ZENG R , WU J , SHAO Z ,et al . Color image classification via quaternion principal component analysis network
[J]. Neurocomputing , 2016 ,216 : 416 -428 .
[本文引用: 1]
[10]
CHEN B , SHU H , COATRIEUX G ,et al . Color image analysis by quaternion-type moments
[J]. Journal of Mathematical Imaging and Vision , 2015 ,51 (1 ): 124 -144 .
[本文引用: 1]
[11]
CAO J D , WANG J . Global asymptotic stability of a general class of recurrent neural networks with time-varying delays
[J]. IEEE Transactions on Circuits and Systems I:Fundamental Theory and Applications , 2003 ,50 (1 ): 34 -44 .
[本文引用: 1]
[12]
CHEN X F , LI Z S , SONG Q K ,et al . Robust stability analysis of quaternion-valued neural networks with time delays and parameter uncertainties
[J]. Neural Networks , 2017 ,91 : 55 -65 .
[本文引用: 2]
[13]
马知恩 , 周义仓 , 李承治 . 常微分方程定性与稳定性方法
[M]. 北京 : 科学出版社 , 2015 .
[本文引用: 1]
MA Z E , ZHOU Y C , LI C Z . Qualitative and stability methods for ordinary differential equations
[M]. Beijing : Science PressPress , 2015 .
[本文引用: 1]
[14]
ISOKAWA T , KUSAKABE T , MATSUI N ,et al . Quaternion neural network and its application
[C]// International Conference on Knowledge-Based and Intelligent Information and Engineering Systems . Heidelberg:Springer , 2003 : 318 -324 .
[本文引用: 1]
[15]
GUPTA S , . Linear quaternion equations with application to spacecraft attitude propagation
[C]// 1998 IEEE Aerospace Conference . Piscataway:IEEE Press , 1998 1 : 69 -76 .
[本文引用: 1]
[16]
KUSAMICHI H , ISOKAWA T , MATSUI N ,et al . A new scheme for color night vision by quaternion neural network
[C]// The 2nd International Conference on Autonomous Robots and Agents . Piscataway:IEEE Press , 2004 :1315.
[本文引用: 1]
[17]
MATSUI N , ISOKAWA T , KUSAMICHI H ,et al . Quaternion neural network with geometrical operators
[J]. Journal of Intelligent & Fuzzy Systems , 2004 ,15 (3,4 ): 149 -164 .
[本文引用: 1]
Neural networks and physical systems with emergent collective computational abilities
1
1982
... 自从生物物理学家Hopfield[1 ] 在20世纪80年代首次提出人工神经网络以来,人工神经网络得到了广泛的研究.如今,人工神经网络在联想记忆、图像处理、优化组合等方面得到了广泛的应用[2 ,3 ,4 ,5 ] .在这些领域对人工神经网络系统的稳定性进行研究是十分必要的[6 ,7 ,8 ] . ...
Design and analysis of high-capacity associative memories based on a class of discrete-time recurrent neural networks
1
2008
... 自从生物物理学家Hopfield[1 ] 在20世纪80年代首次提出人工神经网络以来,人工神经网络得到了广泛的研究.如今,人工神经网络在联想记忆、图像处理、优化组合等方面得到了广泛的应用[2 ,3 ,4 ,5 ] .在这些领域对人工神经网络系统的稳定性进行研究是十分必要的[6 ,7 ,8 ] . ...
Complex-valued multistate associative memory with nonlinear multilevel functions for gray-level image reconstruction
1
2009
... 自从生物物理学家Hopfield[1 ] 在20世纪80年代首次提出人工神经网络以来,人工神经网络得到了广泛的研究.如今,人工神经网络在联想记忆、图像处理、优化组合等方面得到了广泛的应用[2 ,3 ,4 ,5 ] .在这些领域对人工神经网络系统的稳定性进行研究是十分必要的[6 ,7 ,8 ] . ...
Neurocomputing with time delay analysis for solving convex quadratic programming problems
1
2000
... 自从生物物理学家Hopfield[1 ] 在20世纪80年代首次提出人工神经网络以来,人工神经网络得到了广泛的研究.如今,人工神经网络在联想记忆、图像处理、优化组合等方面得到了广泛的应用[2 ,3 ,4 ,5 ] .在这些领域对人工神经网络系统的稳定性进行研究是十分必要的[6 ,7 ,8 ] . ...
Single-layered complex-valued neural network for real-valued classification problems
1
2009
... 自从生物物理学家Hopfield[1 ] 在20世纪80年代首次提出人工神经网络以来,人工神经网络得到了广泛的研究.如今,人工神经网络在联想记忆、图像处理、优化组合等方面得到了广泛的应用[2 ,3 ,4 ,5 ] .在这些领域对人工神经网络系统的稳定性进行研究是十分必要的[6 ,7 ,8 ] . ...
Global exponential stability of complex-valued neural networks with both time-varying delays and impulsive effects
1
2016
... 自从生物物理学家Hopfield[1 ] 在20世纪80年代首次提出人工神经网络以来,人工神经网络得到了广泛的研究.如今,人工神经网络在联想记忆、图像处理、优化组合等方面得到了广泛的应用[2 ,3 ,4 ,5 ] .在这些领域对人工神经网络系统的稳定性进行研究是十分必要的[6 ,7 ,8 ] . ...
Stability analysis for neural networks with time-varying delay based on quadratic convex combination
1
2013
... 自从生物物理学家Hopfield[1 ] 在20世纪80年代首次提出人工神经网络以来,人工神经网络得到了广泛的研究.如今,人工神经网络在联想记忆、图像处理、优化组合等方面得到了广泛的应用[2 ,3 ,4 ,5 ] .在这些领域对人工神经网络系统的稳定性进行研究是十分必要的[6 ,7 ,8 ] . ...
Multistability analysis of quaternion-valued neural networks with time delays
1
2018
... 自从生物物理学家Hopfield[1 ] 在20世纪80年代首次提出人工神经网络以来,人工神经网络得到了广泛的研究.如今,人工神经网络在联想记忆、图像处理、优化组合等方面得到了广泛的应用[2 ,3 ,4 ,5 ] .在这些领域对人工神经网络系统的稳定性进行研究是十分必要的[6 ,7 ,8 ] . ...
Color image classification via quaternion principal component analysis network
1
2016
... 近年来,随着数域的扩张,人工神经网络主要有实数神经网络、复数神经网络以及四元数神经网络.四元数由一个实部和3个虚部构成,四元数对数据信息的存储能力比实数和复数都要强.一个四元数的数据存储能力是一个实数的4倍,是一个复数的2倍.因此,四元数神经网络在处理高维数据时比实数神经网络以及复数神经网络都更有优势.例如,在与图像有关的应用中,一种颜色往往由红色(R)、绿色(G)和蓝色(B)3种基本颜色按照各自的像素值合成,将 R、G、B 值分别对应于纯四元数的3个虚部部分i、j和k的系数时,一种颜色便可以用一个纯虚数唯一表示,一张图片可以用一个纯四元数矩阵唯一表示[9 ,10 ] . ...
Color image analysis by quaternion-type moments
1
2015
... 近年来,随着数域的扩张,人工神经网络主要有实数神经网络、复数神经网络以及四元数神经网络.四元数由一个实部和3个虚部构成,四元数对数据信息的存储能力比实数和复数都要强.一个四元数的数据存储能力是一个实数的4倍,是一个复数的2倍.因此,四元数神经网络在处理高维数据时比实数神经网络以及复数神经网络都更有优势.例如,在与图像有关的应用中,一种颜色往往由红色(R)、绿色(G)和蓝色(B)3种基本颜色按照各自的像素值合成,将 R、G、B 值分别对应于纯四元数的3个虚部部分i、j和k的系数时,一种颜色便可以用一个纯虚数唯一表示,一张图片可以用一个纯四元数矩阵唯一表示[9 ,10 ] . ...
Global asymptotic stability of a general class of recurrent neural networks with time-varying delays
1
2003
... 证明 通过文献[11 ]中的定理1与定理2,可以直接得到本文的定理1和定理2. ...
Robust stability analysis of quaternion-valued neural networks with time delays and parameter uncertainties
2
2017
... 证明 根据文献[12 ]中的引理2,可以直接得到这个结果. ...
... 引理2[12 ] 当且仅当下面的两个式子之一成立: ...
常微分方程定性与稳定性方法
1
2015
... 引理3[13 ] 若在原点的领域U内,存在正定(负定)函数V(t)使得 V ˙ ( t )
常微分方程定性与稳定性方法
1
2015
... 引理3[13 ] 若在原点的领域U内,存在正定(负定)函数V(t)使得 V ˙ ( t )
Quaternion neural network and its application
1
2003
... 注 4 按照数据类型,可将神经网络分为实值神经网络、复值神经网络和四元数神经网络.实值神经网络的应用十分广泛,但是它无法高效地处理诸如二维仿射变换或者三维仿射变换等几何变换问题.为了解决这一问题,学者们发现复值神经网络能够将二维空间中的一个点数据建模成一个单独的整体,而不是两个数据单元的集合,这就使得复值神经网络在处理二维数据的仿射变换时,比实值神经网络更为高效快捷.然而,在实际生活中,常常需要处理三维数据,例如,与图像有关的应用、方向预测以及机器人操控等.近年来,学者们发现采用四元数可以直接对高维数据进行编码处理,大幅提升了处理效率,尤其在处理三维空间变换时非常高效简洁.目前四元数神经网络已经在卫星的姿态控制、彩色图像压缩、计算机图像学、彩色微光夜视以及机器人运动控制等诸多领域展现了良好的应用前景[14 ,15 ,16 ,17 ] .因此,关于四元数神经网络稳定性的研究是十分有意义的.然而,目前研究的四元数神经网络不满足乘法交换律,即存在一定的局限性.本文提出的可交换四元数神经网络在一定程度上解决了这一局限性.目前,关于本文所涉及的交换四元数神经网络的渐近稳定性研究较少,因此本文研究具有一定的创新性. ...
Linear quaternion equations with application to spacecraft attitude propagation
1
1998
... 注 4 按照数据类型,可将神经网络分为实值神经网络、复值神经网络和四元数神经网络.实值神经网络的应用十分广泛,但是它无法高效地处理诸如二维仿射变换或者三维仿射变换等几何变换问题.为了解决这一问题,学者们发现复值神经网络能够将二维空间中的一个点数据建模成一个单独的整体,而不是两个数据单元的集合,这就使得复值神经网络在处理二维数据的仿射变换时,比实值神经网络更为高效快捷.然而,在实际生活中,常常需要处理三维数据,例如,与图像有关的应用、方向预测以及机器人操控等.近年来,学者们发现采用四元数可以直接对高维数据进行编码处理,大幅提升了处理效率,尤其在处理三维空间变换时非常高效简洁.目前四元数神经网络已经在卫星的姿态控制、彩色图像压缩、计算机图像学、彩色微光夜视以及机器人运动控制等诸多领域展现了良好的应用前景[14 ,15 ,16 ,17 ] .因此,关于四元数神经网络稳定性的研究是十分有意义的.然而,目前研究的四元数神经网络不满足乘法交换律,即存在一定的局限性.本文提出的可交换四元数神经网络在一定程度上解决了这一局限性.目前,关于本文所涉及的交换四元数神经网络的渐近稳定性研究较少,因此本文研究具有一定的创新性. ...
A new scheme for color night vision by quaternion neural network
1
2004
... 注 4 按照数据类型,可将神经网络分为实值神经网络、复值神经网络和四元数神经网络.实值神经网络的应用十分广泛,但是它无法高效地处理诸如二维仿射变换或者三维仿射变换等几何变换问题.为了解决这一问题,学者们发现复值神经网络能够将二维空间中的一个点数据建模成一个单独的整体,而不是两个数据单元的集合,这就使得复值神经网络在处理二维数据的仿射变换时,比实值神经网络更为高效快捷.然而,在实际生活中,常常需要处理三维数据,例如,与图像有关的应用、方向预测以及机器人操控等.近年来,学者们发现采用四元数可以直接对高维数据进行编码处理,大幅提升了处理效率,尤其在处理三维空间变换时非常高效简洁.目前四元数神经网络已经在卫星的姿态控制、彩色图像压缩、计算机图像学、彩色微光夜视以及机器人运动控制等诸多领域展现了良好的应用前景[14 ,15 ,16 ,17 ] .因此,关于四元数神经网络稳定性的研究是十分有意义的.然而,目前研究的四元数神经网络不满足乘法交换律,即存在一定的局限性.本文提出的可交换四元数神经网络在一定程度上解决了这一局限性.目前,关于本文所涉及的交换四元数神经网络的渐近稳定性研究较少,因此本文研究具有一定的创新性. ...
Quaternion neural network with geometrical operators
1
2004
... 注 4 按照数据类型,可将神经网络分为实值神经网络、复值神经网络和四元数神经网络.实值神经网络的应用十分广泛,但是它无法高效地处理诸如二维仿射变换或者三维仿射变换等几何变换问题.为了解决这一问题,学者们发现复值神经网络能够将二维空间中的一个点数据建模成一个单独的整体,而不是两个数据单元的集合,这就使得复值神经网络在处理二维数据的仿射变换时,比实值神经网络更为高效快捷.然而,在实际生活中,常常需要处理三维数据,例如,与图像有关的应用、方向预测以及机器人操控等.近年来,学者们发现采用四元数可以直接对高维数据进行编码处理,大幅提升了处理效率,尤其在处理三维空间变换时非常高效简洁.目前四元数神经网络已经在卫星的姿态控制、彩色图像压缩、计算机图像学、彩色微光夜视以及机器人运动控制等诸多领域展现了良好的应用前景[14 ,15 ,16 ,17 ] .因此,关于四元数神经网络稳定性的研究是十分有意义的.然而,目前研究的四元数神经网络不满足乘法交换律,即存在一定的局限性.本文提出的可交换四元数神经网络在一定程度上解决了这一局限性.目前,关于本文所涉及的交换四元数神经网络的渐近稳定性研究较少,因此本文研究具有一定的创新性. ...















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}