The National Natural Science Foundation of China. 41971424 The National Natural Science Foundation of China. 61702251 The National Natural Science Foundation of China. 61701191 The National Natural Science Foundation of China. 41871380 The National Natural Science Foundation of China. U1605254 The Science and Technology Project of Xiamen. 3502Z20183032 The Education and Scientific Research Project for Middle-Aged and Young Teachers of Fujian Province. JT180877
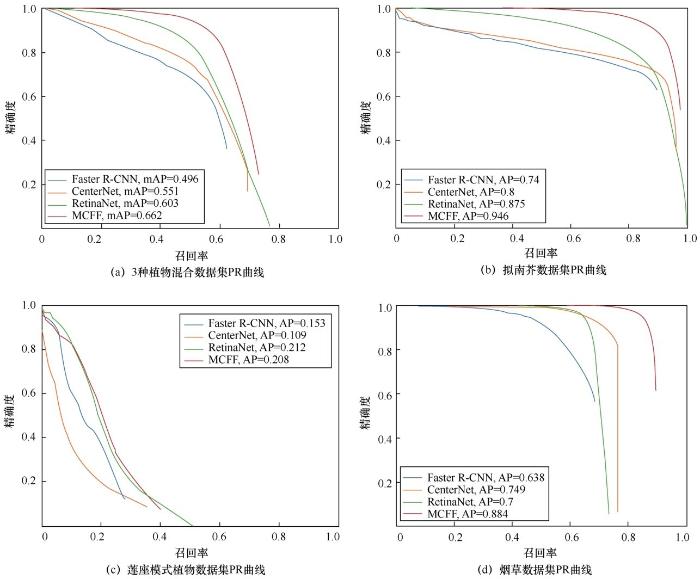
Plant leaf detection is one of the essential aspects of the scientific plant breeding and precision agriculture process.The traditional practice of plant leaf detection requires professional knowledge of the operators, high labor costs, and long time-consuming cycles.The plant leaf detection technology based on multi-scale CNN feature fusion (MCFF) was proposed.Starting from the needs of deep learning technology assisted plant cultivation, a MCFF was used to detect leaf count for three different types and resolutions of rosette model plants, arabidopsisthaliana, and tobacco.Compared with the other three algorithms, the MCFF has a higher detection accuracy with an average detection rate of mAP 0.662, a highly competitive performance (AP = 0.946) has been achieved for each indicator close to the practical level.
LI Ying. Plant leaf detection technology based on multi-scale CNN feature fusion. Chinese Journal of Intelligent Science and Technology[J], 2021, 3(3): 304-311 doi:10.11959/j.issn.2096-6652.202131
2006 年,深度学习技术由Hinton G E 等人[6]首次提出,是机器学习的重要分支。深度学习技术结合无监督逐层的预训练和有监督的训练调整[7],有效地从大量的原始数据中提取出能表达有效特征的信息,并实现对训练集的最佳逼近。随着科技的迅速发展,深度学习技术在现实生活中的具体应用受到广泛的关注,在人脸识别[8-9]、自动驾驶[10]、信息融合中的图像检索[11,12,13]等方面展现出强大的生命力。目前深度学习技术主要被应用于自然语言处理、语音识别、计算机视觉及相关的子领域[14]。其中,计算机视觉包括目标分类、目标定位、目标检测和目标分割四大核心任务。
根据是否有候选框,基于深度学习技术的目标检测可分为双阶段目标检测和单阶段目标检测。双阶段目标检测是基于候选框的目标检测方法[15]。双阶段目标检测方法首先需要在图像上生成候选框,然后借助深度卷积神经网络对候选框进行特征提取,最后对候选框内的图像类别进行判断、分类和处理。2014年由Girshick R等人[16]提出的R-CNN是基于候选框的典型的识别方法,是第一个用深度学习方法代替传统的目标检测的算法。2015年微软亚洲研究院的He K M等人[17]提出了SPP-Net,通过在卷积层和全连接层之间加入空间金字塔结构有效地代替 R-CNN 的区域裁剪和缩放,并且有效地解决了 R-CNN 重复提取特征的问题。随后, Girshick R[18]借鉴 SPP-Net 的结构提出了 Fast R-CNN,设计了ROI pooling的池化层结构,有效地解决了 R-CNN 算法中图像区域尺寸必须统一的问题。但是,Fast R-CNN仍然没有摆脱选择性搜索算法生成正负样本候选框的问题。由Ren S Q等人[19]提出的 Faster R-CNN 算法设计了区域候选框提取网络——RPN(region proposal network)。首先,判断候选框是否为目标,然后,根据分类定位的多任务损失判断目标类型,减少候选框数量,解决正负样本候选框生成速度慢的问题。事实上,双阶段目标检测策略在速度上不具有优势,因为双阶段网络需要先后对特征提取网络的区域候选框的生成网络和目标分类网络进行优化。于是,以快速轻量检测为特点的单阶段网络应运而生。
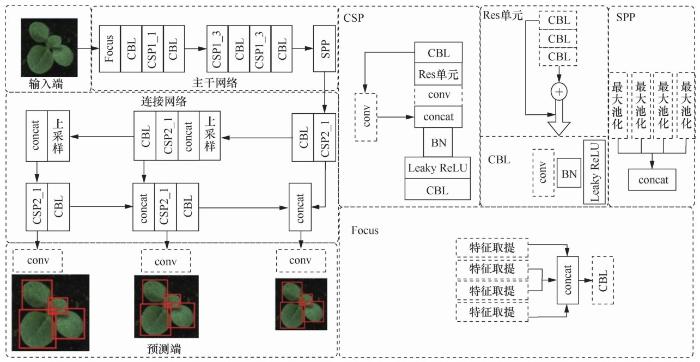
单阶段网络目标检测将整个目标检测任务当作一个参数的回归任务,参数包括边界框位置、边界框大小以及边界框内对象类别。RetinaNet、CenterNet和YOLO系列等都是单阶段目标检测的经典网络。Lin T Y等人[20]借鉴了Faster R-CNN和多尺度目标检测的思想,设计训练出 RetinaNet 目标检测器,该模型的核心思想是通过重塑focal loss损失函数来解决训练过程中检测模型的训练样本出现正负样本不平衡的问题。2019年Duan K W等人[21]提出的 CenterNet 是一种无锚点的单阶段目标检测网络,该网络将待检目标中心视为关键点,然后分别对目标的长宽以及中心点的偏移量进行回归,进而完成目标检测任务,该网络在速度和精度上表现优秀。YOLO 算法是 Redmon J 等人[22]于2016 年提出的一种基于回归的单阶段目标检测算法。YOLO网络首先通过卷积神经网络对输入图像进行特征提取,得到大量降分辨率的特征图谱;其次通过梯度更新算法对参数进行反向更新,然后由网络的最后一层输出预测框;最后用非极大值抑制(non-maximum suppression,NMS)对每个预测框的重叠区域进行概率分析和合并,得到最优检测框。本文在YOLO系列框架的基础上提出了多尺度回归算法。
多尺度回归算法在预测端采用广义交并比损失函数(GIoU_Loss)进行回归训练,广义交并比损失函数相比交并比损失函数(IoU_Loss)增加了相交尺度的融合方法,可有效地解决植株叶片样本预测框与真值框之间边界不重合交并比(intersection over union,IoU)不合理的问题[26]。当获得一定数量的预测框后,采用 NMS 的加权进行候选框的筛选,进而优化遮挡、重叠目标的检测效率,解决植株叶片之间相互遮挡、重叠的问题。
... 2006 年,深度学习技术由Hinton G E 等人[6]首次提出,是机器学习的重要分支.深度学习技术结合无监督逐层的预训练和有监督的训练调整[7],有效地从大量的原始数据中提取出能表达有效特征的信息,并实现对训练集的最佳逼近.随着科技的迅速发展,深度学习技术在现实生活中的具体应用受到广泛的关注,在人脸识别[8-9]、自动驾驶[10]、信息融合中的图像检索[11,12,13]等方面展现出强大的生命力.目前深度学习技术主要被应用于自然语言处理、语音识别、计算机视觉及相关的子领域[14].其中,计算机视觉包括目标分类、目标定位、目标检测和目标分割四大核心任务. ...
深度学习在流程工业过程数据建模中的应用
1
2020
... 2006 年,深度学习技术由Hinton G E 等人[6]首次提出,是机器学习的重要分支.深度学习技术结合无监督逐层的预训练和有监督的训练调整[7],有效地从大量的原始数据中提取出能表达有效特征的信息,并实现对训练集的最佳逼近.随着科技的迅速发展,深度学习技术在现实生活中的具体应用受到广泛的关注,在人脸识别[8-9]、自动驾驶[10]、信息融合中的图像检索[11,12,13]等方面展现出强大的生命力.目前深度学习技术主要被应用于自然语言处理、语音识别、计算机视觉及相关的子领域[14].其中,计算机视觉包括目标分类、目标定位、目标检测和目标分割四大核心任务. ...
深度学习在流程工业过程数据建模中的应用
1
2020
... 2006 年,深度学习技术由Hinton G E 等人[6]首次提出,是机器学习的重要分支.深度学习技术结合无监督逐层的预训练和有监督的训练调整[7],有效地从大量的原始数据中提取出能表达有效特征的信息,并实现对训练集的最佳逼近.随着科技的迅速发展,深度学习技术在现实生活中的具体应用受到广泛的关注,在人脸识别[8-9]、自动驾驶[10]、信息融合中的图像检索[11,12,13]等方面展现出强大的生命力.目前深度学习技术主要被应用于自然语言处理、语音识别、计算机视觉及相关的子领域[14].其中,计算机视觉包括目标分类、目标定位、目标检测和目标分割四大核心任务. ...
Enhanced deep learning algorithm development to detect pain intensity from facial expression images
1
2020
... 2006 年,深度学习技术由Hinton G E 等人[6]首次提出,是机器学习的重要分支.深度学习技术结合无监督逐层的预训练和有监督的训练调整[7],有效地从大量的原始数据中提取出能表达有效特征的信息,并实现对训练集的最佳逼近.随着科技的迅速发展,深度学习技术在现实生活中的具体应用受到广泛的关注,在人脸识别[8-9]、自动驾驶[10]、信息融合中的图像检索[11,12,13]等方面展现出强大的生命力.目前深度学习技术主要被应用于自然语言处理、语音识别、计算机视觉及相关的子领域[14].其中,计算机视觉包括目标分类、目标定位、目标检测和目标分割四大核心任务. ...
Real-time multiple spatiotemporal action localization and prediction approach using deep learning
1
2020
... 2006 年,深度学习技术由Hinton G E 等人[6]首次提出,是机器学习的重要分支.深度学习技术结合无监督逐层的预训练和有监督的训练调整[7],有效地从大量的原始数据中提取出能表达有效特征的信息,并实现对训练集的最佳逼近.随着科技的迅速发展,深度学习技术在现实生活中的具体应用受到广泛的关注,在人脸识别[8-9]、自动驾驶[10]、信息融合中的图像检索[11,12,13]等方面展现出强大的生命力.目前深度学习技术主要被应用于自然语言处理、语音识别、计算机视觉及相关的子领域[14].其中,计算机视觉包括目标分类、目标定位、目标检测和目标分割四大核心任务. ...
Deep learning for LiDAR point clouds in autonomous driving:a review
1
2021
... 2006 年,深度学习技术由Hinton G E 等人[6]首次提出,是机器学习的重要分支.深度学习技术结合无监督逐层的预训练和有监督的训练调整[7],有效地从大量的原始数据中提取出能表达有效特征的信息,并实现对训练集的最佳逼近.随着科技的迅速发展,深度学习技术在现实生活中的具体应用受到广泛的关注,在人脸识别[8-9]、自动驾驶[10]、信息融合中的图像检索[11,12,13]等方面展现出强大的生命力.目前深度学习技术主要被应用于自然语言处理、语音识别、计算机视觉及相关的子领域[14].其中,计算机视觉包括目标分类、目标定位、目标检测和目标分割四大核心任务. ...
A fast fractal coding in application of image retrieval
1
2009
... 2006 年,深度学习技术由Hinton G E 等人[6]首次提出,是机器学习的重要分支.深度学习技术结合无监督逐层的预训练和有监督的训练调整[7],有效地从大量的原始数据中提取出能表达有效特征的信息,并实现对训练集的最佳逼近.随着科技的迅速发展,深度学习技术在现实生活中的具体应用受到广泛的关注,在人脸识别[8-9]、自动驾驶[10]、信息融合中的图像检索[11,12,13]等方面展现出强大的生命力.目前深度学习技术主要被应用于自然语言处理、语音识别、计算机视觉及相关的子领域[14].其中,计算机视觉包括目标分类、目标定位、目标检测和目标分割四大核心任务. ...
A decisive content based image retrieval approach for feature fusion in visual and textual images
1
2019
... 2006 年,深度学习技术由Hinton G E 等人[6]首次提出,是机器学习的重要分支.深度学习技术结合无监督逐层的预训练和有监督的训练调整[7],有效地从大量的原始数据中提取出能表达有效特征的信息,并实现对训练集的最佳逼近.随着科技的迅速发展,深度学习技术在现实生活中的具体应用受到广泛的关注,在人脸识别[8-9]、自动驾驶[10]、信息融合中的图像检索[11,12,13]等方面展现出强大的生命力.目前深度学习技术主要被应用于自然语言处理、语音识别、计算机视觉及相关的子领域[14].其中,计算机视觉包括目标分类、目标定位、目标检测和目标分割四大核心任务. ...
Visual and textual information fusion using Kernel method for content based image retrieval
1
2018
... 2006 年,深度学习技术由Hinton G E 等人[6]首次提出,是机器学习的重要分支.深度学习技术结合无监督逐层的预训练和有监督的训练调整[7],有效地从大量的原始数据中提取出能表达有效特征的信息,并实现对训练集的最佳逼近.随着科技的迅速发展,深度学习技术在现实生活中的具体应用受到广泛的关注,在人脸识别[8-9]、自动驾驶[10]、信息融合中的图像检索[11,12,13]等方面展现出强大的生命力.目前深度学习技术主要被应用于自然语言处理、语音识别、计算机视觉及相关的子领域[14].其中,计算机视觉包括目标分类、目标定位、目标检测和目标分割四大核心任务. ...
深度学习在化学信息学中的应用
1
2017
... 2006 年,深度学习技术由Hinton G E 等人[6]首次提出,是机器学习的重要分支.深度学习技术结合无监督逐层的预训练和有监督的训练调整[7],有效地从大量的原始数据中提取出能表达有效特征的信息,并实现对训练集的最佳逼近.随着科技的迅速发展,深度学习技术在现实生活中的具体应用受到广泛的关注,在人脸识别[8-9]、自动驾驶[10]、信息融合中的图像检索[11,12,13]等方面展现出强大的生命力.目前深度学习技术主要被应用于自然语言处理、语音识别、计算机视觉及相关的子领域[14].其中,计算机视觉包括目标分类、目标定位、目标检测和目标分割四大核心任务. ...
深度学习在化学信息学中的应用
1
2017
... 2006 年,深度学习技术由Hinton G E 等人[6]首次提出,是机器学习的重要分支.深度学习技术结合无监督逐层的预训练和有监督的训练调整[7],有效地从大量的原始数据中提取出能表达有效特征的信息,并实现对训练集的最佳逼近.随着科技的迅速发展,深度学习技术在现实生活中的具体应用受到广泛的关注,在人脸识别[8-9]、自动驾驶[10]、信息融合中的图像检索[11,12,13]等方面展现出强大的生命力.目前深度学习技术主要被应用于自然语言处理、语音识别、计算机视觉及相关的子领域[14].其中,计算机视觉包括目标分类、目标定位、目标检测和目标分割四大核心任务. ...
Deep learning for generic object detection:a survey
1
2020
... 根据是否有候选框,基于深度学习技术的目标检测可分为双阶段目标检测和单阶段目标检测.双阶段目标检测是基于候选框的目标检测方法[15].双阶段目标检测方法首先需要在图像上生成候选框,然后借助深度卷积神经网络对候选框进行特征提取,最后对候选框内的图像类别进行判断、分类和处理.2014年由Girshick R等人[16]提出的R-CNN是基于候选框的典型的识别方法,是第一个用深度学习方法代替传统的目标检测的算法.2015年微软亚洲研究院的He K M等人[17]提出了SPP-Net,通过在卷积层和全连接层之间加入空间金字塔结构有效地代替 R-CNN 的区域裁剪和缩放,并且有效地解决了 R-CNN 重复提取特征的问题.随后, Girshick R[18]借鉴 SPP-Net 的结构提出了 Fast R-CNN,设计了ROI pooling的池化层结构,有效地解决了 R-CNN 算法中图像区域尺寸必须统一的问题.但是,Fast R-CNN仍然没有摆脱选择性搜索算法生成正负样本候选框的问题.由Ren S Q等人[19]提出的 Faster R-CNN 算法设计了区域候选框提取网络——RPN(region proposal network).首先,判断候选框是否为目标,然后,根据分类定位的多任务损失判断目标类型,减少候选框数量,解决正负样本候选框生成速度慢的问题.事实上,双阶段目标检测策略在速度上不具有优势,因为双阶段网络需要先后对特征提取网络的区域候选框的生成网络和目标分类网络进行优化.于是,以快速轻量检测为特点的单阶段网络应运而生. ...
Rich feature hierarchies for accurate object detection and semantic segmentation
1
2014
... 根据是否有候选框,基于深度学习技术的目标检测可分为双阶段目标检测和单阶段目标检测.双阶段目标检测是基于候选框的目标检测方法[15].双阶段目标检测方法首先需要在图像上生成候选框,然后借助深度卷积神经网络对候选框进行特征提取,最后对候选框内的图像类别进行判断、分类和处理.2014年由Girshick R等人[16]提出的R-CNN是基于候选框的典型的识别方法,是第一个用深度学习方法代替传统的目标检测的算法.2015年微软亚洲研究院的He K M等人[17]提出了SPP-Net,通过在卷积层和全连接层之间加入空间金字塔结构有效地代替 R-CNN 的区域裁剪和缩放,并且有效地解决了 R-CNN 重复提取特征的问题.随后, Girshick R[18]借鉴 SPP-Net 的结构提出了 Fast R-CNN,设计了ROI pooling的池化层结构,有效地解决了 R-CNN 算法中图像区域尺寸必须统一的问题.但是,Fast R-CNN仍然没有摆脱选择性搜索算法生成正负样本候选框的问题.由Ren S Q等人[19]提出的 Faster R-CNN 算法设计了区域候选框提取网络——RPN(region proposal network).首先,判断候选框是否为目标,然后,根据分类定位的多任务损失判断目标类型,减少候选框数量,解决正负样本候选框生成速度慢的问题.事实上,双阶段目标检测策略在速度上不具有优势,因为双阶段网络需要先后对特征提取网络的区域候选框的生成网络和目标分类网络进行优化.于是,以快速轻量检测为特点的单阶段网络应运而生. ...
Spatial pyramid pooling in deep convolutional networks for visual recognition
1
2015
... 根据是否有候选框,基于深度学习技术的目标检测可分为双阶段目标检测和单阶段目标检测.双阶段目标检测是基于候选框的目标检测方法[15].双阶段目标检测方法首先需要在图像上生成候选框,然后借助深度卷积神经网络对候选框进行特征提取,最后对候选框内的图像类别进行判断、分类和处理.2014年由Girshick R等人[16]提出的R-CNN是基于候选框的典型的识别方法,是第一个用深度学习方法代替传统的目标检测的算法.2015年微软亚洲研究院的He K M等人[17]提出了SPP-Net,通过在卷积层和全连接层之间加入空间金字塔结构有效地代替 R-CNN 的区域裁剪和缩放,并且有效地解决了 R-CNN 重复提取特征的问题.随后, Girshick R[18]借鉴 SPP-Net 的结构提出了 Fast R-CNN,设计了ROI pooling的池化层结构,有效地解决了 R-CNN 算法中图像区域尺寸必须统一的问题.但是,Fast R-CNN仍然没有摆脱选择性搜索算法生成正负样本候选框的问题.由Ren S Q等人[19]提出的 Faster R-CNN 算法设计了区域候选框提取网络——RPN(region proposal network).首先,判断候选框是否为目标,然后,根据分类定位的多任务损失判断目标类型,减少候选框数量,解决正负样本候选框生成速度慢的问题.事实上,双阶段目标检测策略在速度上不具有优势,因为双阶段网络需要先后对特征提取网络的区域候选框的生成网络和目标分类网络进行优化.于是,以快速轻量检测为特点的单阶段网络应运而生. ...
Fast R-CNN
1
2015
... 根据是否有候选框,基于深度学习技术的目标检测可分为双阶段目标检测和单阶段目标检测.双阶段目标检测是基于候选框的目标检测方法[15].双阶段目标检测方法首先需要在图像上生成候选框,然后借助深度卷积神经网络对候选框进行特征提取,最后对候选框内的图像类别进行判断、分类和处理.2014年由Girshick R等人[16]提出的R-CNN是基于候选框的典型的识别方法,是第一个用深度学习方法代替传统的目标检测的算法.2015年微软亚洲研究院的He K M等人[17]提出了SPP-Net,通过在卷积层和全连接层之间加入空间金字塔结构有效地代替 R-CNN 的区域裁剪和缩放,并且有效地解决了 R-CNN 重复提取特征的问题.随后, Girshick R[18]借鉴 SPP-Net 的结构提出了 Fast R-CNN,设计了ROI pooling的池化层结构,有效地解决了 R-CNN 算法中图像区域尺寸必须统一的问题.但是,Fast R-CNN仍然没有摆脱选择性搜索算法生成正负样本候选框的问题.由Ren S Q等人[19]提出的 Faster R-CNN 算法设计了区域候选框提取网络——RPN(region proposal network).首先,判断候选框是否为目标,然后,根据分类定位的多任务损失判断目标类型,减少候选框数量,解决正负样本候选框生成速度慢的问题.事实上,双阶段目标检测策略在速度上不具有优势,因为双阶段网络需要先后对特征提取网络的区域候选框的生成网络和目标分类网络进行优化.于是,以快速轻量检测为特点的单阶段网络应运而生. ...
Faster R-CNN:towards real-time object detection with region proposal networks
1
2017
... 根据是否有候选框,基于深度学习技术的目标检测可分为双阶段目标检测和单阶段目标检测.双阶段目标检测是基于候选框的目标检测方法[15].双阶段目标检测方法首先需要在图像上生成候选框,然后借助深度卷积神经网络对候选框进行特征提取,最后对候选框内的图像类别进行判断、分类和处理.2014年由Girshick R等人[16]提出的R-CNN是基于候选框的典型的识别方法,是第一个用深度学习方法代替传统的目标检测的算法.2015年微软亚洲研究院的He K M等人[17]提出了SPP-Net,通过在卷积层和全连接层之间加入空间金字塔结构有效地代替 R-CNN 的区域裁剪和缩放,并且有效地解决了 R-CNN 重复提取特征的问题.随后, Girshick R[18]借鉴 SPP-Net 的结构提出了 Fast R-CNN,设计了ROI pooling的池化层结构,有效地解决了 R-CNN 算法中图像区域尺寸必须统一的问题.但是,Fast R-CNN仍然没有摆脱选择性搜索算法生成正负样本候选框的问题.由Ren S Q等人[19]提出的 Faster R-CNN 算法设计了区域候选框提取网络——RPN(region proposal network).首先,判断候选框是否为目标,然后,根据分类定位的多任务损失判断目标类型,减少候选框数量,解决正负样本候选框生成速度慢的问题.事实上,双阶段目标检测策略在速度上不具有优势,因为双阶段网络需要先后对特征提取网络的区域候选框的生成网络和目标分类网络进行优化.于是,以快速轻量检测为特点的单阶段网络应运而生. ...
Focal loss for dense object detection
1
2020
... 单阶段网络目标检测将整个目标检测任务当作一个参数的回归任务,参数包括边界框位置、边界框大小以及边界框内对象类别.RetinaNet、CenterNet和YOLO系列等都是单阶段目标检测的经典网络.Lin T Y等人[20]借鉴了Faster R-CNN和多尺度目标检测的思想,设计训练出 RetinaNet 目标检测器,该模型的核心思想是通过重塑focal loss损失函数来解决训练过程中检测模型的训练样本出现正负样本不平衡的问题.2019年Duan K W等人[21]提出的 CenterNet 是一种无锚点的单阶段目标检测网络,该网络将待检目标中心视为关键点,然后分别对目标的长宽以及中心点的偏移量进行回归,进而完成目标检测任务,该网络在速度和精度上表现优秀.YOLO 算法是 Redmon J 等人[22]于2016 年提出的一种基于回归的单阶段目标检测算法.YOLO网络首先通过卷积神经网络对输入图像进行特征提取,得到大量降分辨率的特征图谱;其次通过梯度更新算法对参数进行反向更新,然后由网络的最后一层输出预测框;最后用非极大值抑制(non-maximum suppression,NMS)对每个预测框的重叠区域进行概率分析和合并,得到最优检测框.本文在YOLO系列框架的基础上提出了多尺度回归算法. ...
CenterNet:keypoint triplets for object detection
1
2019
... 单阶段网络目标检测将整个目标检测任务当作一个参数的回归任务,参数包括边界框位置、边界框大小以及边界框内对象类别.RetinaNet、CenterNet和YOLO系列等都是单阶段目标检测的经典网络.Lin T Y等人[20]借鉴了Faster R-CNN和多尺度目标检测的思想,设计训练出 RetinaNet 目标检测器,该模型的核心思想是通过重塑focal loss损失函数来解决训练过程中检测模型的训练样本出现正负样本不平衡的问题.2019年Duan K W等人[21]提出的 CenterNet 是一种无锚点的单阶段目标检测网络,该网络将待检目标中心视为关键点,然后分别对目标的长宽以及中心点的偏移量进行回归,进而完成目标检测任务,该网络在速度和精度上表现优秀.YOLO 算法是 Redmon J 等人[22]于2016 年提出的一种基于回归的单阶段目标检测算法.YOLO网络首先通过卷积神经网络对输入图像进行特征提取,得到大量降分辨率的特征图谱;其次通过梯度更新算法对参数进行反向更新,然后由网络的最后一层输出预测框;最后用非极大值抑制(non-maximum suppression,NMS)对每个预测框的重叠区域进行概率分析和合并,得到最优检测框.本文在YOLO系列框架的基础上提出了多尺度回归算法. ...
You only look once:unified,real-time object detection
1
2016
... 单阶段网络目标检测将整个目标检测任务当作一个参数的回归任务,参数包括边界框位置、边界框大小以及边界框内对象类别.RetinaNet、CenterNet和YOLO系列等都是单阶段目标检测的经典网络.Lin T Y等人[20]借鉴了Faster R-CNN和多尺度目标检测的思想,设计训练出 RetinaNet 目标检测器,该模型的核心思想是通过重塑focal loss损失函数来解决训练过程中检测模型的训练样本出现正负样本不平衡的问题.2019年Duan K W等人[21]提出的 CenterNet 是一种无锚点的单阶段目标检测网络,该网络将待检目标中心视为关键点,然后分别对目标的长宽以及中心点的偏移量进行回归,进而完成目标检测任务,该网络在速度和精度上表现优秀.YOLO 算法是 Redmon J 等人[22]于2016 年提出的一种基于回归的单阶段目标检测算法.YOLO网络首先通过卷积神经网络对输入图像进行特征提取,得到大量降分辨率的特征图谱;其次通过梯度更新算法对参数进行反向更新,然后由网络的最后一层输出预测框;最后用非极大值抑制(non-maximum suppression,NMS)对每个预测框的重叠区域进行概率分析和合并,得到最优检测框.本文在YOLO系列框架的基础上提出了多尺度回归算法. ...









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}