Due to the absorption and scattering of light in water, the images captured by underwater robots suffer from color distortion and reduced contrast.Aiming at alleviating the quality degradation phenomenon of underwater images, an underwater image enhancement network based on vision Transformer that be trained with multiple losses fusion strategy was proposed.The image enhancement network adopted an encoder-decoder architecture, and could be trained in an end-to-end manner.In order to effectively update the parameters of the network for enhancing underwater images, a linear combination of various losses was adopted as the overall optimization objective, including pixel loss, structure loss, edge loss and feature loss.Quantitative experiments were carried out on two large underwater datasets, and the proposed underwater image enhancement network was compared with 7 underwater image enhancement algorithms.The full reference evaluation metrics peak signal-to-noise ratio and structural similarity were calculated in experiment, and the non-referenced metric underwater image quality measure was also computed.The experimental results showed that the proposed underwater image enhancement network could effectively deal with color distortion and contrast reduction.
CONG Xiaofeng. Underwater image enhancement network based on visual Transformer with multiple loss functions fusion. Chinese Journal of Intelligent Science and Technology[J], 2022, 4(4): 522-532 doi:10.11959/j.issn.2096-6652.202252
严浙平等人[1]指出水下成像的机制要比陆地上更加复杂,光线在水中与陆地上的传播衰减不同,水体中存在的溶解物会影响成像过程,而且当水下深度较深时,拍摄过程中需要辅助光源。因此,水下图像的增强是具有挑战性的研究问题[13]。当前的水下图像增强研究可分为非基于深度学习与基于深度学习两种。第一种是非基于深度学习的算法。Drews Jr P等人[2-3]基于图像去雾领域的DCP提出了UDCP算法。Peng Y T等人[4]基于图像模糊和亮度吸收,提出了一种针对水下图像的深度估计算法,并进一步用于水下图像的质量复原过程,该方法被称为IBLA。Song W等人[5]同样从水下图像的深度估计角度出发,基于ULAP设计了一种快速的深度预测模型。常戬等人[14]利用导向滤波和自适应算子设计了水下图像增强算法。
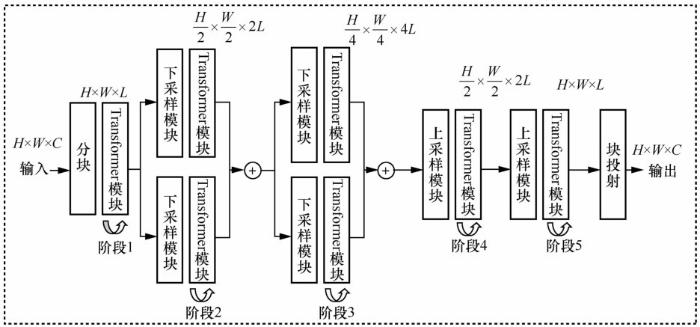
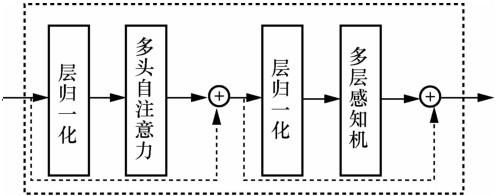
神经网络已经被应用于多种视觉任务中[15,16,17]。第二种水下图像增强算法是基于深度学习的算法。Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法。Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果。Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练。陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型。范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络。Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法。Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化。Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN)。已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑。Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务。本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量。
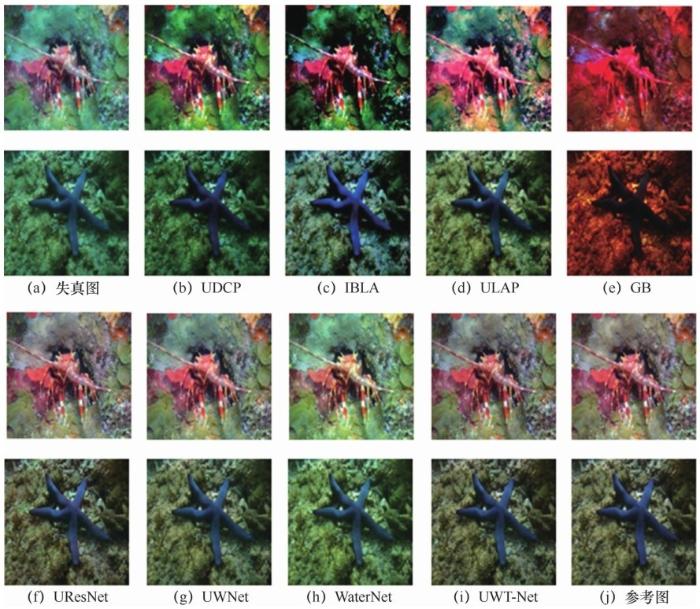
作为对比试验的评估算法包括 UDCP[3]、IBLA[4]、ULAP[5]、绿色蓝色增强(green blue enhancement,GB)[31]、UResNet[6]、UWNet[7]与WaterNet[20]。非基于深度学习的增强算法实现来自参考文献[32];基于深度学习的对比算法用到的批数据量、学习率和迭代轮数等设置均与 UWT-Net保持一致。
... 严浙平等人[1]指出水下成像的机制要比陆地上更加复杂,光线在水中与陆地上的传播衰减不同,水体中存在的溶解物会影响成像过程,而且当水下深度较深时,拍摄过程中需要辅助光源.因此,水下图像的增强是具有挑战性的研究问题[13].当前的水下图像增强研究可分为非基于深度学习与基于深度学习两种.第一种是非基于深度学习的算法.Drews Jr P等人[2-3]基于图像去雾领域的DCP提出了UDCP算法.Peng Y T等人[4]基于图像模糊和亮度吸收,提出了一种针对水下图像的深度估计算法,并进一步用于水下图像的质量复原过程,该方法被称为IBLA.Song W等人[5]同样从水下图像的深度估计角度出发,基于ULAP设计了一种快速的深度预测模型.常戬等人[14]利用导向滤波和自适应算子设计了水下图像增强算法. ...
... 严浙平等人[1]指出水下成像的机制要比陆地上更加复杂,光线在水中与陆地上的传播衰减不同,水体中存在的溶解物会影响成像过程,而且当水下深度较深时,拍摄过程中需要辅助光源.因此,水下图像的增强是具有挑战性的研究问题[13].当前的水下图像增强研究可分为非基于深度学习与基于深度学习两种.第一种是非基于深度学习的算法.Drews Jr P等人[2-3]基于图像去雾领域的DCP提出了UDCP算法.Peng Y T等人[4]基于图像模糊和亮度吸收,提出了一种针对水下图像的深度估计算法,并进一步用于水下图像的质量复原过程,该方法被称为IBLA.Song W等人[5]同样从水下图像的深度估计角度出发,基于ULAP设计了一种快速的深度预测模型.常戬等人[14]利用导向滤波和自适应算子设计了水下图像增强算法. ...
Transmission estimation in underwater single images
... 严浙平等人[1]指出水下成像的机制要比陆地上更加复杂,光线在水中与陆地上的传播衰减不同,水体中存在的溶解物会影响成像过程,而且当水下深度较深时,拍摄过程中需要辅助光源.因此,水下图像的增强是具有挑战性的研究问题[13].当前的水下图像增强研究可分为非基于深度学习与基于深度学习两种.第一种是非基于深度学习的算法.Drews Jr P等人[2-3]基于图像去雾领域的DCP提出了UDCP算法.Peng Y T等人[4]基于图像模糊和亮度吸收,提出了一种针对水下图像的深度估计算法,并进一步用于水下图像的质量复原过程,该方法被称为IBLA.Song W等人[5]同样从水下图像的深度估计角度出发,基于ULAP设计了一种快速的深度预测模型.常戬等人[14]利用导向滤波和自适应算子设计了水下图像增强算法. ...
Underwater depth estimation and image restoration based on single images
... 严浙平等人[1]指出水下成像的机制要比陆地上更加复杂,光线在水中与陆地上的传播衰减不同,水体中存在的溶解物会影响成像过程,而且当水下深度较深时,拍摄过程中需要辅助光源.因此,水下图像的增强是具有挑战性的研究问题[13].当前的水下图像增强研究可分为非基于深度学习与基于深度学习两种.第一种是非基于深度学习的算法.Drews Jr P等人[2-3]基于图像去雾领域的DCP提出了UDCP算法.Peng Y T等人[4]基于图像模糊和亮度吸收,提出了一种针对水下图像的深度估计算法,并进一步用于水下图像的质量复原过程,该方法被称为IBLA.Song W等人[5]同样从水下图像的深度估计角度出发,基于ULAP设计了一种快速的深度预测模型.常戬等人[14]利用导向滤波和自适应算子设计了水下图像增强算法. ...
... 作为对比试验的评估算法包括 UDCP[3]、IBLA[4]、ULAP[5]、绿色蓝色增强(green blue enhancement,GB)[31]、UResNet[6]、UWNet[7]与WaterNet[20].非基于深度学习的增强算法实现来自参考文献[32];基于深度学习的对比算法用到的批数据量、学习率和迭代轮数等设置均与 UWT-Net保持一致. ...
Underwater image restoration based on image blurriness and light absorption
... 严浙平等人[1]指出水下成像的机制要比陆地上更加复杂,光线在水中与陆地上的传播衰减不同,水体中存在的溶解物会影响成像过程,而且当水下深度较深时,拍摄过程中需要辅助光源.因此,水下图像的增强是具有挑战性的研究问题[13].当前的水下图像增强研究可分为非基于深度学习与基于深度学习两种.第一种是非基于深度学习的算法.Drews Jr P等人[2-3]基于图像去雾领域的DCP提出了UDCP算法.Peng Y T等人[4]基于图像模糊和亮度吸收,提出了一种针对水下图像的深度估计算法,并进一步用于水下图像的质量复原过程,该方法被称为IBLA.Song W等人[5]同样从水下图像的深度估计角度出发,基于ULAP设计了一种快速的深度预测模型.常戬等人[14]利用导向滤波和自适应算子设计了水下图像增强算法. ...
... 作为对比试验的评估算法包括 UDCP[3]、IBLA[4]、ULAP[5]、绿色蓝色增强(green blue enhancement,GB)[31]、UResNet[6]、UWNet[7]与WaterNet[20].非基于深度学习的增强算法实现来自参考文献[32];基于深度学习的对比算法用到的批数据量、学习率和迭代轮数等设置均与 UWT-Net保持一致. ...
A rapid scene depth estimation model based on underwater light attenuation prior for underwater image restoration
... 严浙平等人[1]指出水下成像的机制要比陆地上更加复杂,光线在水中与陆地上的传播衰减不同,水体中存在的溶解物会影响成像过程,而且当水下深度较深时,拍摄过程中需要辅助光源.因此,水下图像的增强是具有挑战性的研究问题[13].当前的水下图像增强研究可分为非基于深度学习与基于深度学习两种.第一种是非基于深度学习的算法.Drews Jr P等人[2-3]基于图像去雾领域的DCP提出了UDCP算法.Peng Y T等人[4]基于图像模糊和亮度吸收,提出了一种针对水下图像的深度估计算法,并进一步用于水下图像的质量复原过程,该方法被称为IBLA.Song W等人[5]同样从水下图像的深度估计角度出发,基于ULAP设计了一种快速的深度预测模型.常戬等人[14]利用导向滤波和自适应算子设计了水下图像增强算法. ...
... 作为对比试验的评估算法包括 UDCP[3]、IBLA[4]、ULAP[5]、绿色蓝色增强(green blue enhancement,GB)[31]、UResNet[6]、UWNet[7]与WaterNet[20].非基于深度学习的增强算法实现来自参考文献[32];基于深度学习的对比算法用到的批数据量、学习率和迭代轮数等设置均与 UWT-Net保持一致. ...
Underwater image enhancement with a deep residual framework
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
... 作为对比试验的评估算法包括 UDCP[3]、IBLA[4]、ULAP[5]、绿色蓝色增强(green blue enhancement,GB)[31]、UResNet[6]、UWNet[7]与WaterNet[20].非基于深度学习的增强算法实现来自参考文献[32];基于深度学习的对比算法用到的批数据量、学习率和迭代轮数等设置均与 UWT-Net保持一致. ...
Shallow-UWnet:compressed model for underwater image enhancement (student abstract)
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
... 作为对比试验的评估算法包括 UDCP[3]、IBLA[4]、ULAP[5]、绿色蓝色增强(green blue enhancement,GB)[31]、UResNet[6]、UWNet[7]与WaterNet[20].非基于深度学习的增强算法实现来自参考文献[32];基于深度学习的对比算法用到的批数据量、学习率和迭代轮数等设置均与 UWT-Net保持一致. ...
Underwater scene prior inspired deep underwater image and video enhancement
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
Underwater single image color restoration using haze-lines and a new quantitative dataset
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
WaterGAN:unsupervised generative network to enable real-time color correction of monocular underwater images
1
2018
... 严浙平等人[1]指出水下成像的机制要比陆地上更加复杂,光线在水中与陆地上的传播衰减不同,水体中存在的溶解物会影响成像过程,而且当水下深度较深时,拍摄过程中需要辅助光源.因此,水下图像的增强是具有挑战性的研究问题[13].当前的水下图像增强研究可分为非基于深度学习与基于深度学习两种.第一种是非基于深度学习的算法.Drews Jr P等人[2-3]基于图像去雾领域的DCP提出了UDCP算法.Peng Y T等人[4]基于图像模糊和亮度吸收,提出了一种针对水下图像的深度估计算法,并进一步用于水下图像的质量复原过程,该方法被称为IBLA.Song W等人[5]同样从水下图像的深度估计角度出发,基于ULAP设计了一种快速的深度预测模型.常戬等人[14]利用导向滤波和自适应算子设计了水下图像增强算法. ...
结合导向滤波与自适应算子的水下图像增强
1
2021
... 严浙平等人[1]指出水下成像的机制要比陆地上更加复杂,光线在水中与陆地上的传播衰减不同,水体中存在的溶解物会影响成像过程,而且当水下深度较深时,拍摄过程中需要辅助光源.因此,水下图像的增强是具有挑战性的研究问题[13].当前的水下图像增强研究可分为非基于深度学习与基于深度学习两种.第一种是非基于深度学习的算法.Drews Jr P等人[2-3]基于图像去雾领域的DCP提出了UDCP算法.Peng Y T等人[4]基于图像模糊和亮度吸收,提出了一种针对水下图像的深度估计算法,并进一步用于水下图像的质量复原过程,该方法被称为IBLA.Song W等人[5]同样从水下图像的深度估计角度出发,基于ULAP设计了一种快速的深度预测模型.常戬等人[14]利用导向滤波和自适应算子设计了水下图像增强算法. ...
结合导向滤波与自适应算子的水下图像增强
1
2021
... 严浙平等人[1]指出水下成像的机制要比陆地上更加复杂,光线在水中与陆地上的传播衰减不同,水体中存在的溶解物会影响成像过程,而且当水下深度较深时,拍摄过程中需要辅助光源.因此,水下图像的增强是具有挑战性的研究问题[13].当前的水下图像增强研究可分为非基于深度学习与基于深度学习两种.第一种是非基于深度学习的算法.Drews Jr P等人[2-3]基于图像去雾领域的DCP提出了UDCP算法.Peng Y T等人[4]基于图像模糊和亮度吸收,提出了一种针对水下图像的深度估计算法,并进一步用于水下图像的质量复原过程,该方法被称为IBLA.Song W等人[5]同样从水下图像的深度估计角度出发,基于ULAP设计了一种快速的深度预测模型.常戬等人[14]利用导向滤波和自适应算子设计了水下图像增强算法. ...
基于多尺度卷积神经网络特征融合的植株叶片检测技术
1
2021
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
基于多尺度卷积神经网络特征融合的植株叶片检测技术
1
2021
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
基于深度卷积集成网络的视网膜多种疾病筛查和识别方法
1
2021
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
基于深度卷积集成网络的视网膜多种疾病筛查和识别方法
1
2021
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
基于分层卷积神经网络的皮肤镜图像分类方法
1
2021
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
基于分层卷积神经网络的皮肤镜图像分类方法
1
2021
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
多残差联合学习的水下图像增强
3
2022
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
特征融合生成对抗网络的水下图像增强
1
2022
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
An underwater image enhancement benchmark dataset and beyond
3
2020
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
... 作为对比试验的评估算法包括 UDCP[3]、IBLA[4]、ULAP[5]、绿色蓝色增强(green blue enhancement,GB)[31]、UResNet[6]、UWNet[7]与WaterNet[20].非基于深度学习的增强算法实现来自参考文献[32];基于深度学习的对比算法用到的批数据量、学习率和迭代轮数等设置均与 UWT-Net保持一致. ...
Underwater image enhancement using a multiscale dense generative adversarial network
1
2020
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
Enhancing underwater imagery using generative adversarial networks
1
2018
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...
Underwater image enhancement using pre-trained transformer
1
2022
... 神经网络已经被应用于多种视觉任务中[15,16,17].第二种水下图像增强算法是基于深度学习的算法.Liu P 等人[6]使用均方误差损失和边缘差分损失对卷积神经网络参数进行更新,提出了端到端的UResNet增强算法.Naik A等人[7]利用常规的卷积设计了UWNet,结果表明,其在公开数据集上能获得有效的增强效果.Li C Y[8]提出了采用残差学习策略的UWCNN算法,并利用像素损失和结构损失进行网络训练.陈龙等人[18]将残差学习和注意力机制结合,提出了端到端的神经网络增强模型.范新南等人[19]利用生成对抗网络的建模能力和对称型网络的图像重建能力设计了基于特征融合的增强网络.Li C Y 等人[20]设计了水下图像增强网络(underwater image enhancement network, WaterNet),融合了白平衡、直方图均衡和伽马校正算法.Guo Y C等人[21]利用密集连接和跳跃连接设计了基于生成对抗网络的增强模型,采用对抗损失和梯度损失对增强模型进行优化.Fabbri C等人[22]利用生成对抗网络构建数据集,并设计了具有全卷积编码解码结构的水下生成对抗网络(underwater generative adversarial network, UGAN).已有的增强算法主要采用卷积神经网络进行水下图像的增强,缺少对局部与全局特征的高质量建模以及对多种优化目标的考虑.Boudiaf A 等人[23]采用预训练的 Transformer,初步将Transformer 用于水下图像增强任务.本文将含有多头自注意力(multi-head self-attention)的Transformer[10]模块作为增强模型的基础组件构建具有编码-解码结构的去雾网络,并利用多种损失组合提高增强后的水下图像的质量. ...







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}