

Journal on Communications ›› 2019, Vol. 40 ›› Issue (8): 102-113.doi: 10.11959/j.issn.1000-436x.2019098
• Papers • Previous Articles Next Articles
Jiazheng PEI,Yong HUANG( ),Yunlong DONG,Xiaolong CHEN
),Yunlong DONG,Xiaolong CHEN
Revised:2019-05-25
Online:2019-08-25
Published:2019-08-30
Supported by:CLC Number:
Jiazheng PEI,Yong HUANG,Yunlong DONG,Xiaolong CHEN. Improved SMC cardinality-balanced multi-Bernoulli forwardbackward smoothing track-before-detect algorithm[J]. Journal on Communications, 2019, 40(8): 102-113.

"
"
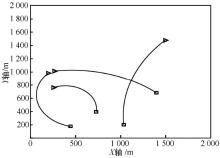
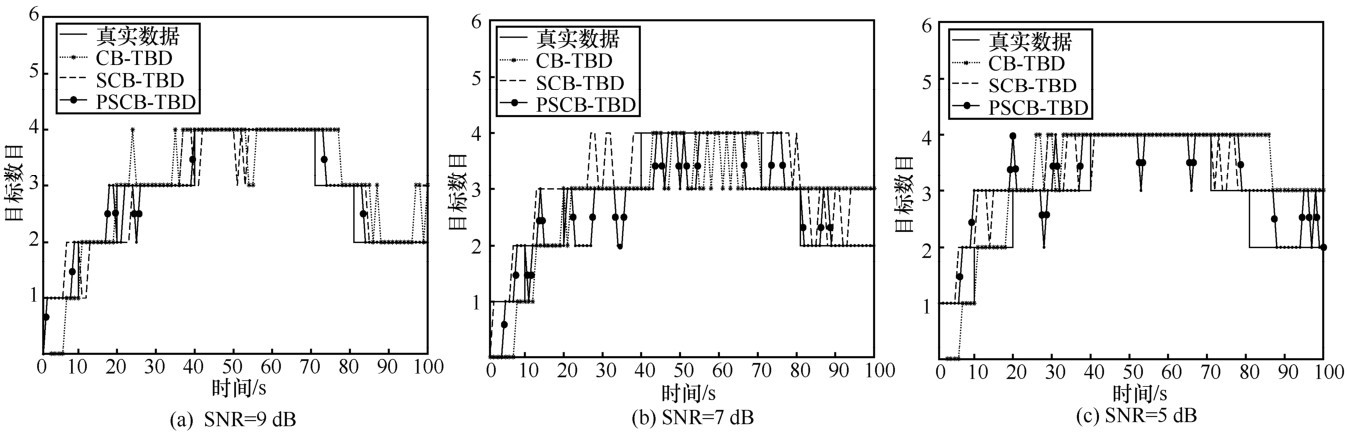
| 目标序号 | 初始时刻/s | 终止时刻/s | 初始状态/[m,m.s-1,m,m.s-1,rad.s-1,-] |
| 1 | 1 | 100 | 1 000,-10,1 500,-10, |
| 2 | 10 | 70 | -250,20,1 000,3,- |
| 3 | 20 | 80 | -250,11,750,5, |
| 4 | 40 | 100 | -500,-12,1 000,-12,- |
"

"

"


"

"
"
"

"

"


"

"
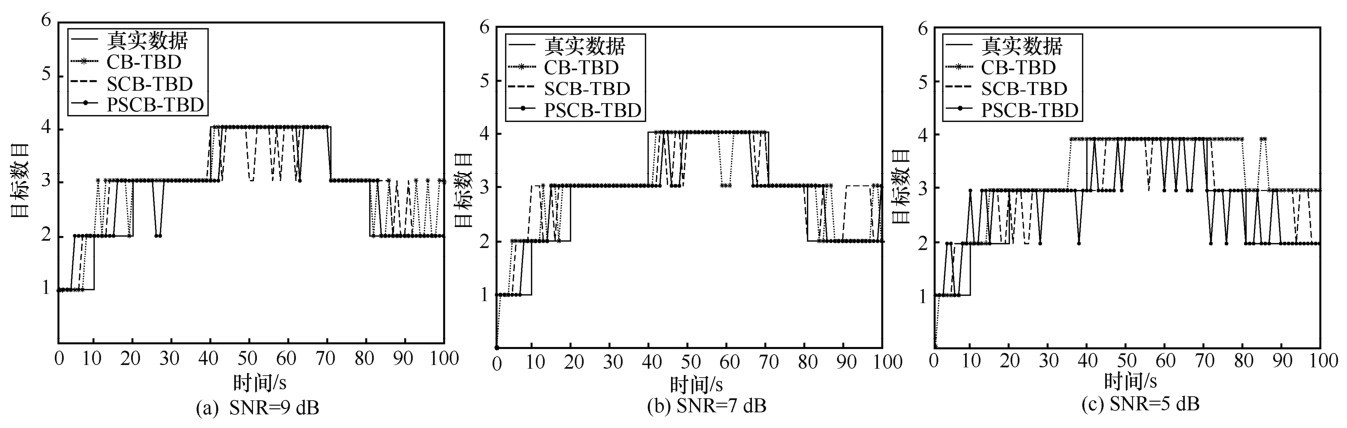
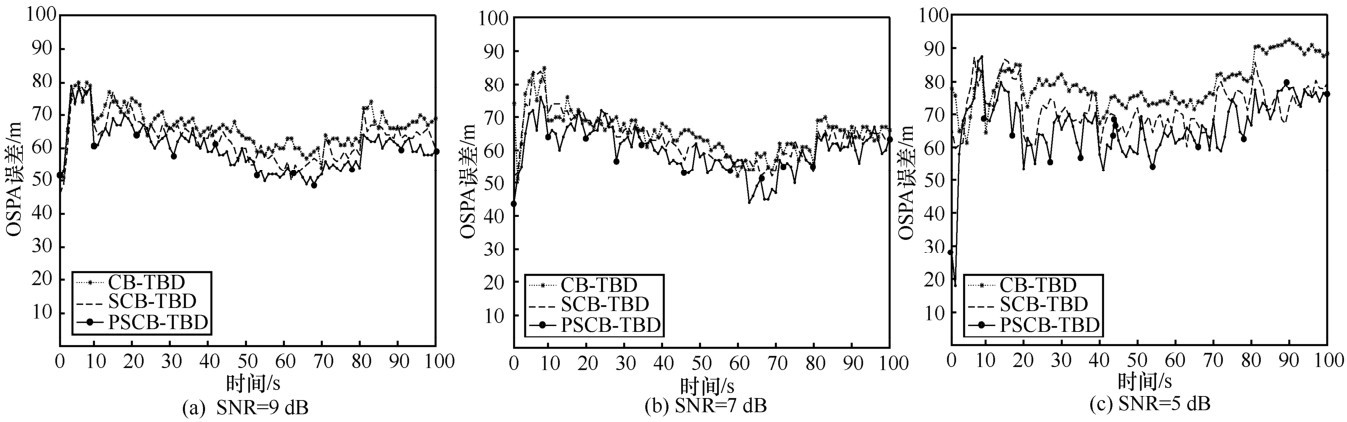
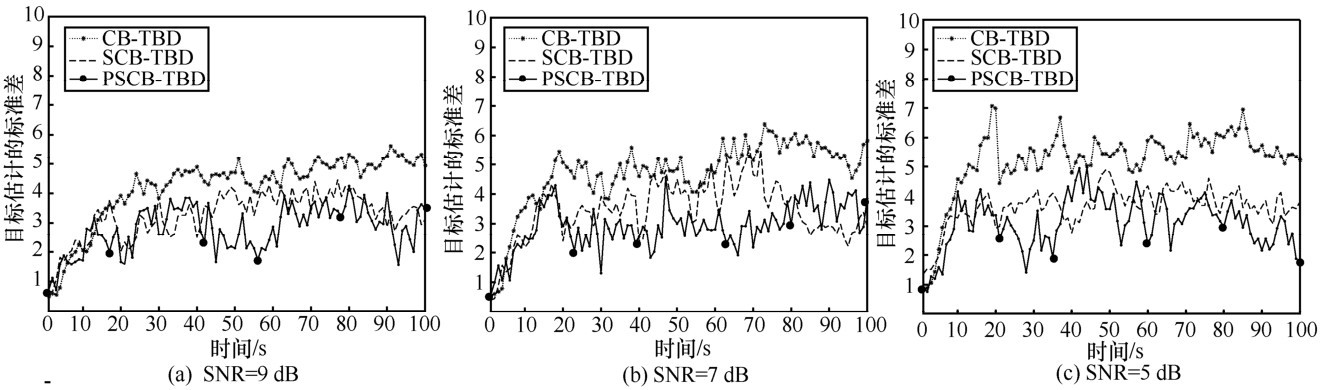
| 信噪比 | 算法 | 标准差均值 | OSPA均值/m | |||||
| PD=0.98 | PD=0.95 | PD=0.90 | PD=0.98 | PD=0.95 | PD=0.90 | |||
| CB-TBD | 3.03 | 4.22 | 6.29 | 65.10 | 73.43 | 78.28 | ||
| 9 dB | SCB-TBD | 2.68 | 3.25 | 4.36 | 62.98 | 66.71 | 71.40 | |
| PSCB-TBD | 2.22 | 2.79 | 3.33 | 59.77 | 60.82 | 62.95 | ||
| CB-TBD | 3.11 | 4.47 | 6.74 | 66.25 | 76.44 | 79.20 | ||
| 7 dB | SCB-TBD | 2.71 | 3.45 | 4.70 | 63.64 | 69.59 | 73.80 | |
| PSCB-TBD | 2.31 | 2.92 | 3.65 | 59.89 | 65.68 | 66.39 | ||
| CB-TBD | 4.01 | 5.24 | 6.87 | 73.08 | 81.69 | 84.76 | ||
| 5 dB | SCB-TBD | 3.09 | 3.66 | 5.37 | 69.40 | 73.86 | 77.20 | |
| PSCB-TBD | 2.82 | 3.09 | 3.87 | 67.76 | 70.65 | 74.56 | ||
| [1] | 蒋鹏, 宋华华, 林广 . 基于粒子群优化和M-H抽样粒子滤波的传感器网络目标跟踪方法[J]. 通信学报, 2013,34(11): 8-17. |
| JIANG P , SONG H H , LIN G . Target tracking algorithm for wireless sensor networks based on particle swarm optimization and metropo-lis-hasting sampling particle filter[J]. Journal on Communications, 2013,34(11): 8-17. | |
| [2] | 戴江安, 邱天爽 . 基于检测前跟踪的声源跟踪算法[J]. 通信学报, 2017,38(2): 67-73. |
| DAI J A , QIU T S . Acoustic source tracking algorithm using track before detect[J]. Journal on Communications, 2017,38(2): 67-73. | |
| [3] | MAHLER R . Statistical multisource-multitarget information fusion[M]. Boston: Artech HousePress, 2007. |
| [4] | MAHLER R . Multitarget Bayes filtering via first-order multitarget moments[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003,39(4): 1152-1178. |
| [5] | MAHLER R . PHD filters of higher order in target number[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007,43(4): 1523-1543. |
| [6] | 王慧斌, 陈哲, 王鑫 ,等. 基于随机有限集的UPF-CPHD多目标跟踪[J]. 通信学报, 2012,33(12): 147-153. |
| WANG H B , CHEN Z , WANG X ,et al. Random finite sets based UPF-CPHD multi-object tracking[J]. Journal on Communications, 2012,33(12): 147-153. | |
| [7] | VO B T , VO B N , CAMTONI A . Bayesian filtering with random finite set observations[J]. IEEE Transactions on Signal Processing, 2018,56(4): 1313-1326. |
| [8] | VO B T , VO B N , CANTONI A . The cardinality balanced multi-target multi-Bernoulli filter and its implement[J]. IEEE Transactions on Signal Processing, 2009,57(2): 409-423. |
| [9] | 朱红鹏, 黄勇, 修建娟 ,等. 基于GM-PHD平滑器的检测前跟踪技术[J]. 雷达科学与技术, 2016,14(6): 648-653. |
| ZHU H P , HUANG Y , XIU J J ,et al. Track-before-detect algorithm using GM-PHD smoothing filter[J]. Radar Science and Technology, 2016,14(6): 648-653. | |
| [10] | VO B T , CLARK D , VO B N ,et al. Bernoulli forward-backward smoothing for joint target detection and tracking[J]. IEEE Transactions on Signal Processing, 2011,59(9): 4473-4477. |
| [11] | WONG S , VO B T , PAPI F . Bernoulli forward-backward smoothing for track-before-detect[J]. IEEE Signal Processing Letters, 2014,21(6): 727-731. |
| [12] | VO B T , SEE C M , MA N ,et al. Multi-sensor joint detection and tracking with the Bernoulli filter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012,48(2): 1385-1402. |
| [13] | 孙杰, 李冬 . 多目标的多伯努利平滑方法[J]. 数字通信, 2014,41(2): 8-11. |
| SUN J , LI D . Multi-Bernoulli smoother for multi-target tracking[J]. Digital Communication, 2014,41(2): 8-11. | |
| [14] | WONG J , VO B T , VO B N ,et al. Multi-Bernoulli based track-before-detect with road constraints[C]// International Conference on Information Fusion. IEEE, 2012: 840-846. |
| [15] | 柳超, 关键, 黄勇 ,等. 基于PHD的多目标检测前跟踪改进方法[J]. 雷达科学与技术, 2016,14(1): 1-6. |
| LIU C , GUAN J , HUANG Y ,et al. An improved multitarget track-before-detect algorithm based on probability hypothesis density filter[J]. Radar Science and Technology, 2016,14(1): 1-6. | |
| [16] | 占荣辉, 刘盛启, 欧建平 ,等. 基于序贯蒙特卡罗概率假设密度滤波的多目标检测前跟踪改进算法[J]. 电子与信息学报, 2014,36(11): 2593-2598. |
| ZHAN R H , LIU S Q , OU J P ,et al. Improved multitarget track before detect algorithm using the sequential Monte Carlo probability hypoth-esis density filter[J]. Journal of Electronics & Information Technology, 2014,36(11): 2593-2598. | |
| [17] | 林再平, 周一宇, 安玮 ,等. 基于概率假设密度滤波平滑器的检测前跟踪算法[J]. 光学学报, 2012,32(10): 124-131. |
| LIN Z P , ZHOU Y Y , AN W ,et al. Track-before-detect algorithm based on probability hypothesis density smoother[J]. Acta Optica Sinica, 2012,32(10): 124-131. | |
| [18] | 李宁 . 基于 MeMBer 滤波器的弱小目标检测前跟踪方法研究[D]. 西安:西安电子科技大学, 2015. |
| LI N . Research on tracking before detection algorithms of dim-small targets based on MeMBer filter[D]. Xi’an:Xidian University, 2015. | |
| [19] | 曹潇男 . 基于随机有限集理论的检测前跟踪方法研究[D]. 西安:西安电子科技大学, 2014. |
| CAO X N . Study of tracking before detection based on random finite set theory[D]. Xi’an:Xidian University, 2014. | |
| [20] | YANG C Q , SHI Z G , HAN K ,et al. Optimization of particle CBMeMBer filters for hardware implement[J]. IEEE Transections on Vehicular Technology, 2018,PP(99):1. |
| [21] | LIU J S , CHEN R , LOGVINENKO T . A theoretical framework for sequential importance sampling with resampling[M]// Sequential Monte Carlo Methods in Practice. New York:Springer , 2001. |
| [22] | 方正, 佟国锋, 徐心和 . 粒子群优化粒子滤波方法[J]. 控制与决策, 2007,22(3): 273-277. |
| FANG Z , TONG G F , XU X H . Particle swarm optimized particle filter[J]. Control and Decision, 2007,22(3): 273-277. | |
| [23] | KENNEDY J , EBERHART R . Particle swarm optimization[C]// IEEE International Conference on Neural Networks. IEEE, 1995: 1941-1948. |
| [24] | 汲清波, 耿丽群, 任超 . 高斯粒子群优化粒子滤波的检测前跟踪算法[J]. 计算机工程与应用, 2014,50(17): 205-209. |
| JI Q B , GENG L Q , REN C . Track before detect algorithm based on Gaussian particle swarm optimiza-tion particle filter[J]. Computer En-gineering and Applications, 2014,50(17): 205-209. | |
| [25] | 余晓东, 雷英杰, 岳韶华 ,等. 基于粒子群优化的直觉模糊核聚类算法研究[J]. 通信学报, 2015,36(5): 74-80. |
| YU X D , LEI Y J , YUE S H ,et al. Research on PSO-based intuition-istic fuzzy kernel clustering algorithm[J]. Journal on Communications, 2015,36(5): 74-80. | |
| [26] | 康岚兰, 董文永, 宋婉娟 ,等. 无惯性自适应精英变异反向粒子群忧化算法[J]. 通信学报, 2017,38(8): 66-78. |
| KANG L L , DONG W Y , SONG W J ,et al. Non-inertial opposi-tion-based particle swarm optimization with adaptive elite mutation[J]. Journal on Communications, 2017,38(8): 66-78. | |
| [27] | DEB K , PRATAP A , AGARWAL S ,et al. A fast and elitist multi-objective genetic algorithm:NSGA-II[J]. IEEE Transactions on Evolutionary Computation, 2002,6(2): 182-197. |
| [28] | LI H , ZHANG Q . Multiobjective optimization problems with complicated Pareto sets,MOEA/D and NSGA-II[J]. IEEE Transactions on Evolutionary Computation, 2009,13(2): 284-302. |
| [29] | VO B N , VO B T , PHAM N T ,et al. Joint detection and estimation of multiple objects from image observations[J]. IEEE Transactions on Signal Processing, 2010,58(10): 5129-5241. |
| [30] | RISTIC B , VO B N , CLARK D ,et al. A metric for performance evaluation of multi-target tracking algorithms[J]. IEEE Transactions on Signal Processing, 2011,59(7): 3452-3457. |
| [1] | Cuiran LI, Xuejie WANG, Jianli XIE, Anqi LYU. Routing algorithm for railway monitoring linear WSN based on improved PSO [J]. Journal on Communications, 2022, 43(5): 155-165. |
| [2] | Yang CAO, Ye ZHONG, Chunling PENG, Xiaofeng PENG. Energy efficiency optimization algorithm of heterogeneous networks based on hybrid energy supply and energy cooperation [J]. Journal on Communications, 2022, 43(3): 135-147. |
| [3] | Hongyan WANG, Libin ZHANG, Guoqiang CHEN, Zumin WANG, Zhiyuan GUAN. Approach of target tracking combining particle filter and metric learning [J]. Journal on Communications, 2021, 42(5): 98-110. |
| [4] | Xin SU, Haoyang XUE, Yiqing ZHOU, Jinxiu ZHU. Research on computing offloading method for maritime observation monitoring sensor network [J]. Journal on Communications, 2021, 42(5): 149-163. |
| [5] | Aijing SUN, Shichang LI, Yicai ZHANG. WSN clustering routing algorithm based on PSO optimized fuzzy C-means [J]. Journal on Communications, 2021, 42(3): 91-99. |
| [6] | Cuiqin DAI,Huang TANG,Linfeng GUO. Contact plan design based on bi-directional particle swarm optimization in satellite network [J]. Journal on Communications, 2019, 40(8): 189-199. |
| [7] | Gang LI,Zhijun WU. Task scheduling algorithm for system-wide information management based on multiple QoS constraints [J]. Journal on Communications, 2019, 40(7): 27-37. |
| [8] | Xiaonian WU,Chuyun ZHANG,Runlian ZHANG,Yaping SUN. Clustering routing protocol based on improved PSO algorithm in WSN [J]. Journal on Communications, 2019, 40(12): 114-123. |
| [9] | Yuanhua FU,Zhiming HE. Distance criterion-based quantizer design for cooperative spectrum sensing [J]. Journal on Communications, 2018, 39(9): 49-56. |
| [10] | Zhen ZHANG,Peng WEI,Yufeng LI,Julong LAN,Ping XU,Bo CHEN. Feature selection algorithm based on improved particle swarm joint taboo search [J]. Journal on Communications, 2018, 39(12): 60-68. |
| [11] | Xing ZHANG,Ye WANG,Yi YANG,Qin-yu ZHANG. Cooperative spectrum sensing scheduling scheme based on discrete particle swarm optimization algorithm [J]. Journal on Communications, 2017, 38(7): 175-185. |
| [12] | Chun-hui ZHAO,Xue-yuan LI,Ying CUI. Image cluster algorithm of hybrid encoding method [J]. Journal on Communications, 2017, 38(2): 1-9. |
| [13] | Jiang-an DAI,Tian-shuang QIU. Acoustic source tracking algorithm using track before detect [J]. Journal on Communications, 2017, 38(2): 67-73. |
| [14] | Ding MA,Lei ZHUANG,Ju-long LAN. Discrete particle swarm optimization based multi-objective service path constructing algorithm [J]. Journal on Communications, 2017, 38(2): 94-105. |
| [15] | Wen-yong DONG,Lan-lan KANG,Yu-hang LIU,Kang-shun LI. Opposition-based particle swarm optimization with adaptive elite mutation and nonlinear inertia weight [J]. Journal on Communications, 2016, 37(12): 1-10. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
|
||