

Journal on Communications ›› 2023, Vol. 44 ›› Issue (2): 136-147.doi: 10.11959/j.issn.1000-436x.2023006
• Papers • Previous Articles Next Articles
Rui JIANG1,2, Yue YU1,2, Youyun XU2, Xiaoming WANG1,2, Dapeng LI1,2
Revised:2022-11-11
Online:2023-02-25
Published:2023-02-01
Supported by:CLC Number:
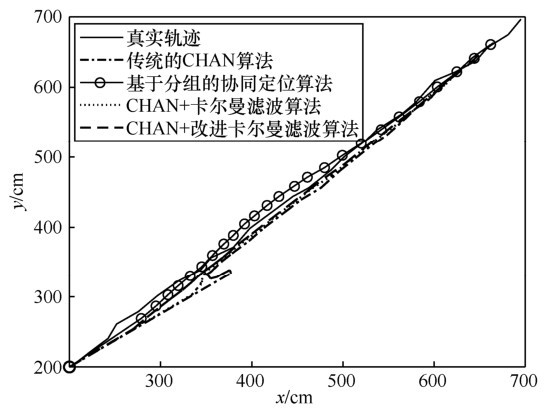
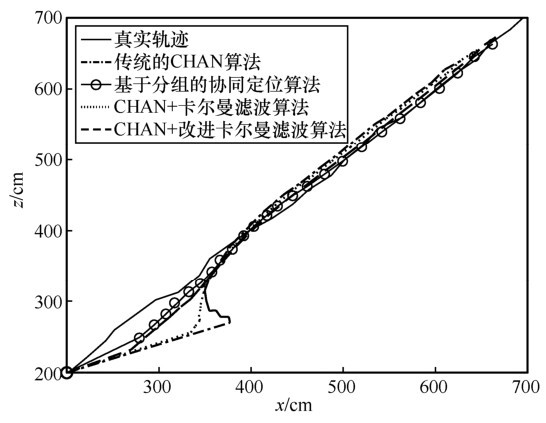
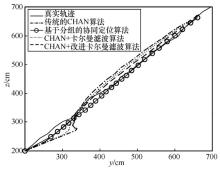
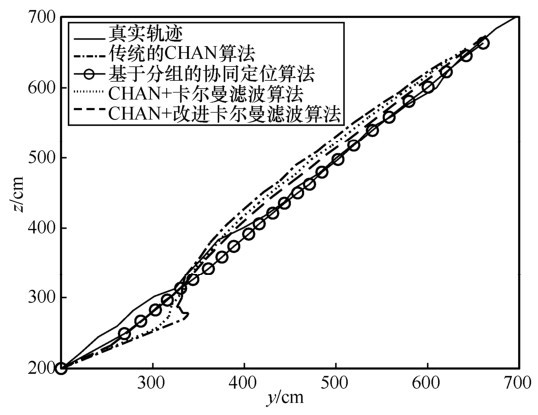
Rui JIANG, Yue YU, Youyun XU, Xiaoming WANG, Dapeng LI. Improved Kalman filter indoor positioning algorithm based on CHAN[J]. Journal on Communications, 2023, 44(2): 136-147.
"
"
| 信道模型 | μNLOS | σNLOS |
| 室内住宅 | 2.693 6 | 0.448 9 |
| 室内办公室 | 2.075 4 | 0.178 3 |
"
"

"

"

"

"
"
"
"
| 算法 | RMSE/cm |
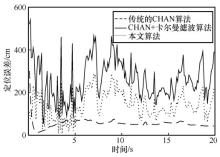
| 传统的CHAN算法 | 221.553 |
| 基于分组的协同定位算法 | 200.865 |
| CHAN+卡尔曼滤波算法 | 132.151 |
| CHAN+改进卡尔曼滤波算法 | 87.799 |
"
"

"
| 算法 | 实际运行时间/s |
| 传统的CHAN算法 | 0.006 11 |
| 基于分组的协同定位算法 | 0.009 15 |
| CHAN+卡尔曼滤波算法 | 0.007 08 |
| CHAN+改进卡尔曼滤波算法 | 0.030 93 |

"

"
"

"
"

| [1] | LI C L , FU Y C , YU F R ,et al. Vehicle position correction:a vehicular blockchain networks-based GPS error sharing framework[J]. IEEE Transactions on Intelligent Transportation Systems, 2021,22(2): 898-912. |
| [2] | DAUDOV I M , OROBEY M N , IGNATEV I V . Bluetooth based technology for industrial personnel local positioning[J]. IOP Conference Series:Materials Science and Engineering, 2021,1111(1): 12-19. |
| [3] | LIU G Q , QIAN Z H , WANG X . An indoor WLAN location algorithm based on fingerprint database processing[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2020,34(10): 1-18. |
| [4] | CAHYADI W A , CHUNG Y H , ADIONO T . Infrared indoor positioning using invisible beacon[C]// Proceedings of 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN). Piscataway:IEEE Press, 2019: 341-345. |
| [5] | SCHOLTZ R A , WEAVER R , HOMIER E ,et al. UWB radio deployment challenges[C]// Proceedings of 11th IEEE International Symposium on Personal Indoor and Mobile Radio Communications. Piscataway:IEEE Press, 2000: 620-625. |
| [6] | HU J P , YANG J . The adaptabilities of different UWB technologies to the FCC UWB emission limit[C]// Proceedings of 2009 International Conference on Communication Software and Networks. Piscataway:IEEE Press, 2009: 358-361. |
| [7] | 蔡红 . 基于UWB的定位方法研究[D]. 北京:北京邮电大学, 2015. |
| CAI H . The research of UWB based positioning techniques[D]. Beijing:Beijing University of Posts and Telecommunications, 2015. | |
| [8] | CHAN Y T , HO K C . A simple and efficient estimator for hyperbolic location[J]. IEEE Transactions on Signal Processing, 1994,42(8): 1905-1915. |
| [9] | 丁业 . NLOS环境下基于UWB的TOA/AOA误差抑制算法研究[D]. 海口:海南大学, 2021. |
| DING Y . Research on TOA/AOA error suppression algorithm based on UWB in NLOS environment[D]. Haikou:Hainan University, 2021. | |
| [10] | AL-JAZZAR S , CAFFERY J , YOU H R . Scattering-model-based methods for TOA location in NLOS environments[J]. IEEE Transactions on Vehicular Technology, 2007,56(2): 583-593. |
| [11] | 宰昶丰, 郭英, 叶瑾 ,等. 基于UWB穿墙定位中NLOS误差的优化方法[J]. 电子测量技术, 2021,44(19): 128-133. |
| ZAI C F , GUO Y , YE J ,et al. Optimization method of NLOS error in UWB through-wall positioning[J]. Electronic Measurement Technology, 2021,44(19): 128-133. | |
| [12] | MUSA A , NUGRAHA G D , HAN H ,et al. A decision tree-based NLOS detection method for the UWB indoor location tracking accuracy improvement[J]. International Journal of Communication Systems, 2019,32(13): e3997. |
| [13] | ZHANG G L , DENG Z L , WEN L ,et al. An UWB location algorithm for indoor NLOS environment[C]// Proceedings of 2018 Ubiquitous Positioning,Indoor Navigation and Location-Based Services (UPINLBS). Piscataway:IEEE Press, 2018: 1-6. |
| [14] | 李玉峰, 王君祎, 李硕磊 . 一种基于 UWB 的高精度室内定位系统设计[J]. 沈阳航空航天大学学报, 2021,38(6): 68-76. |
| LI Y F , WANG J Y , LI S L . A high precision indoor positioning system based on UWB[J]. Journal of Shenyang Aerospace University, 2021,38(6): 68-76. | |
| [15] | 黄泽华 . 基于 UWB 的室内定位系统研究[D]. 济南:山东大学, 2021. |
| HUANG Z Y . Research on indoor positioning system based on UWB[D]. Ji’nan:Shandong University, 2021. | |
| [16] | 杨紫阳, 吴才章, 张弛 . 基于Chan和改进UKF的UWB室内混合定位算法[J]. 组合机床与自动化加工技术, 2020(12): 65-69. |
| YANG Z Y , WU C Z , ZHANG C . Improved Chan-UKF UWB indoor positioning algorithm[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2020(12): 65-69. | |
| [17] | 聂睿 . 一种基于UWB定位的误差抑制TDOA算法研究[D]. 海口:海南大学, 2020. |
| NIE R . Research on an error suppression TDOA algorithm based on UWB positioning[D]. Haikou:Hainan University, 2020. | |
| [18] | TSUMACHI N , OHSEKI T , YAMAZAKI K . Base Station selection method for RAT-dependent TDOA positioning in mobile network[C]// Proceedings of 2021 IEEE Radio and Wireless Symposium. Piscataway:IEEE Press, 2021: 119-122. |
| [19] | 文铠 . 基于超宽带的室内定位与定向关键技术研究[D]. 武汉:武汉大学, 2020. |
| WEN K . Research on the key techniques of ultra-wideband based indoor position and orientation estimation[D]. Wuhan:Wuhan University, 2020. | |
| [20] | SIDORENKO J , SCHATZ V , SCHERER-NEGENBORN N , ,et al. Error corrections for ultrawideband ranging[J]. IEEE Transactions on Instrumentation and Measurement, 2020,69(11): 9037-9047. |
| [21] | PIETRZYK M M , WEBER J H . On the performance of UWB-IR with interleaved coding modulation and polarity randomization on AWGN and multipath fading channels[J]. IEEE Transactions on Vehicular Technology, 2008,57(6): 3578-3588. |
| [22] | WYLIE M P , HOLTZMAN J . The non-line of sight problem in mobile location estimation[C]// Proceedings of 5th International Conference on Universal Personal Communications. Piscataway:IEEE Press, 1996: 827-831. |
| [23] | LOSADA M , ZAMORA-CADENAS L , ALVARADO U ,et al. Performance of an IEEE 802.15.4a ranging system in multipath indoor environments[C]// Proceedings of 2011 IEEE International Conference on Ultra-Wideband. Piscataway:IEEE Press, 2011: 455-459. |
| [24] | GüVEN? ? , CHONG C C , WATANABE F ,et al. NLOS identification and weighted least-squares localization for UWB systems using multipath channel statistics[J]. EURASIP Journal on Advances in Signal Processing,2007, 2008:271984. |
| [25] | 孔维炯, 丁志中, 方福柱 . 基于TDOA的高精度无线定位算法分析与实现[J]. 合肥工业大学学报(自然科学版), 2019,42(6): 756-762. |
| KONG W J , DING Z Z , FANG F Z . Analysis and realization of high precision radio positioning algorithm based on TDOA[J]. Journal of Hefei University of Technology (Natural Science), 2019,42(6): 756-762. | |
| [26] | HAO Z J , LI B B , DANG X C . An improved Kalman filter positioning method in NLOS environment[J]. China Communications, 2019,16(12): 84-99. |
| [1] | Shiqi ZHAO, Xiaohong HUANG, Zhigang ZHONG. Research and implementation of reputation-based inter-domain routing selection mechanism [J]. Journal on Communications, 2023, 44(6): 47-56. |
| [2] | Haibo ZHANG, Kai LAN, Zhou CHEN, Ruyan WANG, Can ZOU, Mingyue WANG. Ring-based efficient batch authentication and group key agreement protocol with anonymity in Internet of vehicles [J]. Journal on Communications, 2023, 44(6): 103-116. |
| [3] | Jun LI, Lejia ZHOU, Zhengquan LI, Ru JI, Jintao ZHU, Xingxin LIU, Ziyi LIU. SCLF algorithm for polar code based on GRU network assistance and path metric exchange [J]. Journal on Communications, 2023, 44(6): 223-237. |
| [4] | Zhen ZHENG, Yingjian YAN, Juesong CAI, Yanjiang LIU. Non-specific TVLA method based on two-sample KS test [J]. Journal on Communications, 2023, 44(5): 137-147. |
| [5] | Haibo ZHANG, Yukun CAO, Kaijian LIU, Ruyan WANG. Distributed trust management scheme based on blockchain in Internet of vehicles [J]. Journal on Communications, 2023, 44(5): 148-157. |
| [6] | Youliang TIAN, Shihong WU, Ta LI, Lindong WANG, Hua ZHOU. Federated learning optimization algorithm based on incentive mechanism [J]. Journal on Communications, 2023, 44(5): 169-180. |
| [7] | Ming TANG, Yifan HU. Load-to-store: exploit the time leakage of store buffer transient window [J]. Journal on Communications, 2023, 44(4): 64-77. |
| [8] | Xiaobei ZHANG, Quan ZHANG, Ming FANG, Kun QIN, Qi ZHANG. Research on channel-fixed delay error estimation of wideband digital array radar [J]. Journal on Communications, 2023, 44(3): 24-32. |
| [9] | Wei CUI, Ying YU, Haixia YU, Chao CHEN, Yunpeng LI. Sparse channel fast reconstruction algorithm for OFDM system based on IOC-CSMP [J]. Journal on Communications, 2023, 44(2): 52-58. |
| [10] | Shengbao WANG, Xin ZHOU, Kang WEN, Bosen WENG. Tripartite authenticated key exchange protocol for smart grid [J]. Journal on Communications, 2023, 44(2): 210-218. |
| [11] | Guojun LI, Cuiling XIANG, Changrong YE, Zunli WANG. Fast link-establishment method of integrated of communication and detection based on short-wave digital channelization [J]. Journal on Communications, 2023, 44(1): 89-102. |
| [12] | Leixiao LI, Jinze DU, Hao LIN, Haoyu GAO, Yanyan YANG, Jing GAO. Research progress of blockchain network covert channel [J]. Journal on Communications, 2022, 43(9): 209-223. |
| [13] | Rong ZENG, Xiao HANG. Reconfigurable intelligent surface assist wireless channel estimation algorithm in Internet of vehicles environment [J]. Journal on Communications, 2022, 43(8): 142-150. |
| [14] | Xin SONG, Shuyan NI, Zhe ZHANG, Yurong LIAO, Tuofeng LEI. Low error floor LT coding algorithm for unequal error protection [J]. Journal on Communications, 2022, 43(6): 85-97. |
| [15] | Binghao YAN, Qinrang LIU, Jianliang SHEN, Xiantuo TANG, Dong LIANG. Fast loop-free path migration strategy in software defined network [J]. Journal on Communications, 2022, 43(5): 24-35. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
|
||