

电信科学 ›› 2021, Vol. 37 ›› Issue (7): 40-47.doi: 10.11959/j.issn.1000-0801.2021146
王伟平1,2, 何西1,2, 董超1,2,3, 郑兵1,2,3, 李雪1,2,3
修回日期:2021-07-02
出版日期:2021-07-20
发布日期:2021-07-01
作者简介:王伟平(1966- ),男,国家海洋局南海调查技术中心高级工程师,主要研究方向为海洋测绘基金资助:Weiping WANG1,2, Xi HE1,2, Chao DONG1,2,3, Bing ZHENG1,2,3, Xue LI1,2,3
Revised:2021-07-02
Online:2021-07-20
Published:2021-07-01
Supported by:摘要:
海洋探测无人艇应用范围广泛,但无人艇姿态易受风、浪、流、漂浮垃圾等环境因素影响,导致结构损坏、观测数据精度下降等问题。设计了无人艇双体宽甲板平台,多波束测深系统安装在升降机构上,保障最佳航行姿态和换能器安全,提高了采集数据的精度。2020年,该无人艇参与江西应急抗洪救灾堤坝勘察任务,在水流湍急、水质浑浊、漂浮垃圾多等不利环境下,圆满完成14 km堤坝底质勘察任务,共发现4处堤坝风险位置点,为抗洪抢险提供了重要的数据支撑。
中图分类号:
王伟平, 何西, 董超, 郑兵, 李雪. 海洋探测无人艇:平台设计及应用[J]. 电信科学, 2021, 37(7): 40-47.
Weiping WANG, Xi HE, Chao DONG, Bing ZHENG, Xue LI. Marine survey unmanned surface vessel:platform design and application[J]. Telecommunications Science, 2021, 37(7): 40-47.

图1
“海洋探测1号”船体型线"
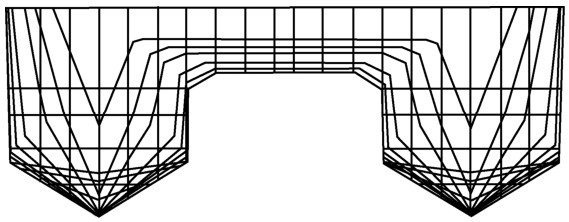

图2
“海洋探测1号”设计方案布置"
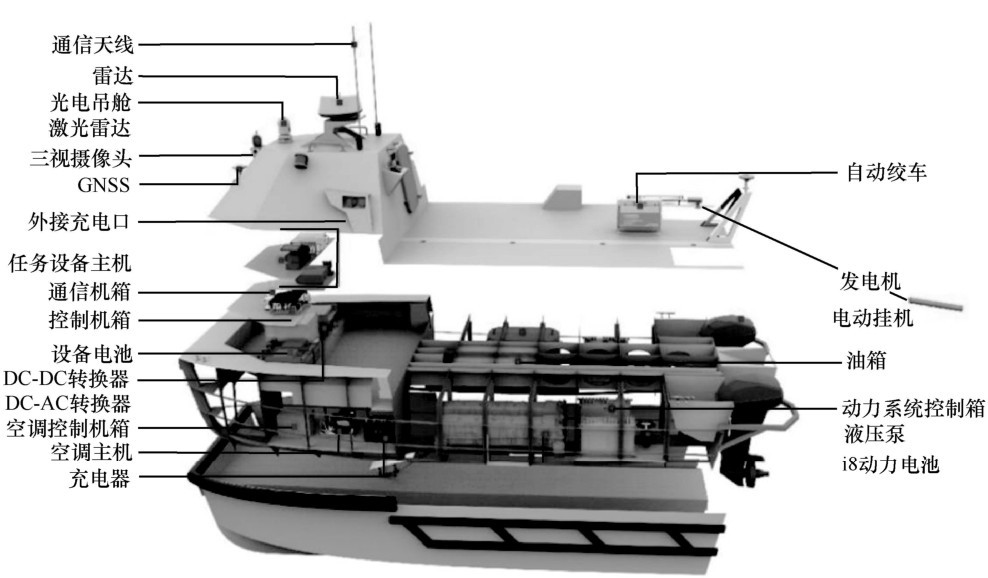

图3
“海洋探测1号”无人艇实物"

表1
“海洋探测1号”技术指标"
| 名称 | 参数性能 |
| 大小 | 长6.9 m,宽2.3 m |
| 满载吃水 | ≤0.5 m(至载荷底部) |
| 设计排水量 | ≤2.5×103kg |
| 搭载能力 | ≥200 kg |
| 工作速度 | 6~8 km |
| 最大平均航速 | ≥12 km |
| 工作续航 | 20 h(工作航速) |
| 通信性能 | 窄带≥45 km;宽带≥25 km,8 Mbit/s |
| 布放回收 | 三级海况下,人员无须登艇实现 |
图4
升降机构安装布置结构"

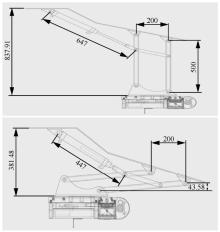
图5
升降机构工作状态示意图(上提状态)"
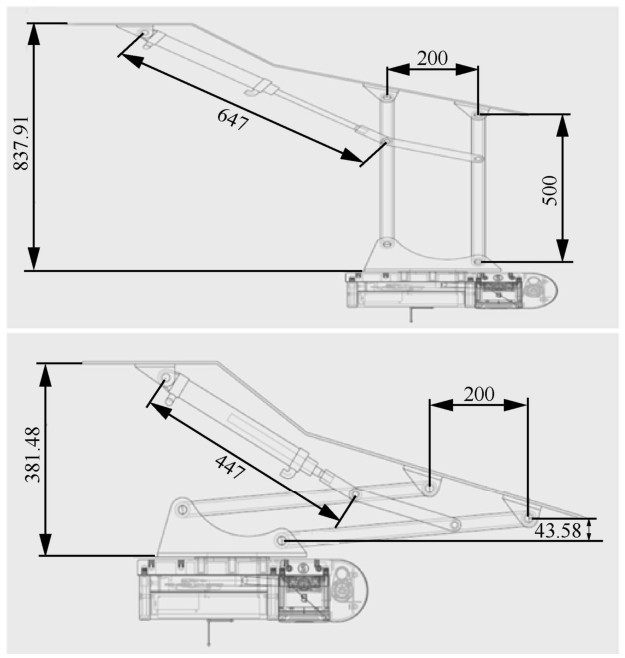

图6
多波束测深系统安装结构"
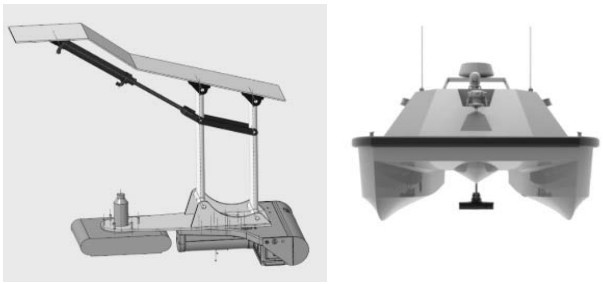
图7
余干县信江信瑞联圩六零腾溪段岸堤地形勘测总体"
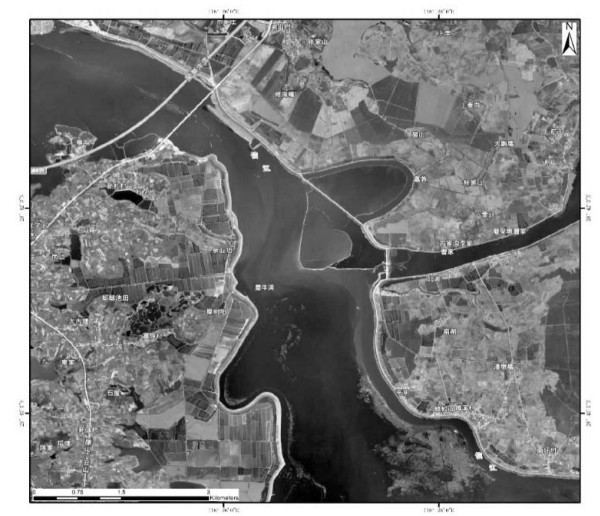
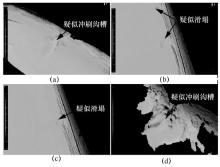
图8
本段防洪岸堤存在的4处风险点"

图9
多波束测线数据内符合精度"
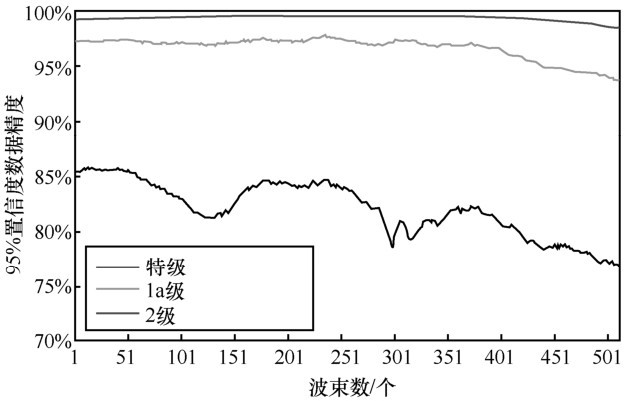
表2
多波束测线数据质量内符合精度"
| 等级 | 最小 | 平均 |
| 特级 | 76.617% | 82.061% |
| 1a级 | 93.867% | 96.769% |
| 2级 | 98.609% | 99.514% |
表3
水深差值基本信息统计"
| 统计类型 | 数值 |
| 重复点个数/个 | 1 153 876 |
| DTM水深平均值/m | 7.29 |
| 联络测线水深平均值/m | 7.15 |
| 交叉点水深平均值/m | -0.14 |
| 交叉点水深差值的中误差/m | 0.11 |
| [1] | 李家良 . 水面无人艇发展与应用[J]. 火力与指挥控制, 2012,37(6): 203-207. |
| LI J L . Development and application of unmanned surface vehicle[J]. Fire Control & Command Control, 2012,37(6): 203-207. | |
| [2] | DONG C , LI X , CHEN X X ,et al. Recent progress of marine survey unmanned surface vehicle in China[J]. Marine Technology Society Journal, 2019,53(3): 23-29. |
| [3] | 许彪, 张宇, 范鹏程 . 美海军无人水面艇发展现状与趋势[J]. 飞航导弹, 2018(1): 10-13. |
| XU B , ZHANG Y , FAN P C.U.S . Navy unmanned surface vessel development status and trends[J]. Aerodynamic Missile Journal, 2018(1): 10-13. | |
| [4] | 董超, 刘蔚, 李雪 ,等. 无人水面艇海洋调查国内应用进展与展望[J]. 导航与控制, 2019,18(1): 1-9,43. |
| DONG C , LIU W , LI X ,et al. Marine survey with unmanned surface vehicle:application progress and prospect in China[J]. Navigation and Control, 2019,18(1): 1-9,43. | |
| [5] | 方中华, 褚宏宪, 冯京 ,等. 无人船艇在海洋地质调查中的应用及展望[J]. 海洋地质前沿, 2020,36(3): 72-77. |
| FANG Z H , CHU H X , FENG J ,et al. Application and prospect of unmanned surface vehicle in marine geological survey[J]. Marine Geology Frontiers, 2020,36(3): 72-77. | |
| [6] | 李勇航, 单晨晨, 苏明 ,等. 声学水面无人艇在浅水海底地貌调查中的应用[J]. 海洋地质与第四纪地质, 2020,40(6): 219-226. |
| LI Y H , SHAN C C , SU M ,et al. Application of acoustic unmanned surface vehicle to submarine geomorphology survey in shallow water[J]. Marine Geology & Quaternary Geology, 2020,40(6): 219-226. | |
| [7] | 杨阳, 耿巍麟, 李天博 ,等. 多功能水体环境监测水面无人艇的设计[J]. 船海工程, 2020,49(1): 15-18. |
| YANG Y , GENG W L , LI T B ,et al. Design of unmanned surface vehicle for multi-functional water environment monitoring[J]. Ship & Ocean Engineering, 2020,49(1): 15-18. | |
| [8] | 万磊, 董早鹏, 李岳明 ,等. 非完全对称欠驱动高速无人艇轨迹跟踪控制[J]. 电机与控制学报, 2014,18(10): 95-103. |
| WAN L , DONG Z P , LI Y M ,et al. Trajectory tracking control of incomplete symmetry underactuated USV at high speed[J]. Electric Machines and Control, 2014,18(10): 95-103. | |
| [9] | 田勇 . 水面无人艇运动控制系统设计与实现[D]. 大连:大连海事大学, 2016. |
| TIAN Y . Design and realization of unmanned surface vehicle motion control system[D]. Dalian:Dalian Maritime University, 2016. | |
| [10] | 林政, 吕霞付 . 基于改进模糊算法的水面无人艇自主避障[J]. 计算机应用, 2019,39(9): 2523-2528. |
| LIN Z , LYU X F . Autonomous obstacle avoidance of unmanned surface vessel based on improved fuzzy algorithm[J]. Journal of Computer Applications, 2019,39(9): 2523-2528. | |
| [11] | 蒲华燕, 丁峰, 李小毛 ,等. 基于椭圆碰撞锥的无人艇动态避障方法[J]. 仪器仪表学报, 2017,38(7): 1756-1762. |
| PU H Y , DING F , LI X M ,et al. Maritime autonomous obstacle avoidance in a dynamic environment based on collision cone of ellipse[J]. Chinese Journal of Scientific Instrument, 2017,38(7): 1756-1762. | |
| [12] | VON ELLENRIEDER K D , . Development of a USV-based bridge inspection system[C]// Proceedings of OCEANS 2015 MTS/IEEE Washington. Piscataway:IEEE Press, 2015: 1-10. |
| [13] | KIM K , HYUN J , CHOI D ,et al. Vertical thrusting unmanned surface vehicle for stable and close inspection of bridge structure[C]// Proceedings of 2016 16th International Conference on Control,Automation and Systems (ICCAS). Piscataway:IEEE Press, 2016: 1040-1042. |
| [14] | 冯伟, 唐睿, 葛宁 . 星地协同智能海洋通信网络发展展望[J]. 电信科学, 2020,36(10): 1-11. |
| FENG W , TANG R , GE N . Perspectives on coordinated satellite-terrestrial intelligent maritime communication network[J]. Telecommunications Science, 2020,36(10): 1-11. |
| [1] | 高凯辉, 李丹. 数据中心网络性能保障研究综述[J]. 电信科学, 2023, 39(6): 1-21. |
| [2] | 李彧, 李召召, 吕平, 刘勤让. 全维可重构的多模态网络交换芯片架构设计[J]. 电信科学, 2023, 39(6): 22-32. |
| [3] | 李炯, 胡宇翔, 崔鹏帅, 田乐, 董永吉. 面向多模态网络环境的网络模态增量式部署机制研究[J]. 电信科学, 2023, 39(6): 33-43. |
| [4] | 郭泽华, 朱昊文, 徐同文. 面向分布式机器学习的网络模态创新[J]. 电信科学, 2023, 39(6): 44-51. |
| [5] | 刘爱华, 骆汉光, 温建中, 占治国. 面向多模态网络的隔离转发技术研究[J]. 电信科学, 2023, 39(6): 52-60. |
| [6] | 邹涛, 张慧峰, 高万鑫, 徐琪, 沈丛麒, 朱俊, 潘仲夏, 国兴昌. 面向智能制造的多模态网络应用技术研究[J]. 电信科学, 2023, 39(6): 61-72. |
| [7] | 何耀宇, 张超. 面向无人机应用的低轨卫星通信技术适航分析[J]. 电信科学, 2023, 39(6): 96-104. |
| [8] | 王甫镔, 孙士渊, 王梦辉, 杨昉, 王小斐, 宋健. 多光源可见光通信关键技术[J]. 电信科学, 2023, 39(5): 3-10. |
| [9] | 马天洋, 陈雄斌, 徐义武. 基于可见光通信的零能耗光标签[J]. 电信科学, 2023, 39(5): 20-27. |
| [10] | 刘思聪, 苏丹萍, 卫天阔, 王先耀. 基于多节点协作的鲁棒可见光智能定位[J]. 电信科学, 2023, 39(5): 28-41. |
| [11] | 胡珈玮, 刘晓谦, 唐昕柯, 董宇涵. 基于DQN的UUV辅助水下无线光通信轨迹规划系统[J]. 电信科学, 2023, 39(5): 42-47. |
| [12] | 刘晓谦, 唐昕柯, 董宇涵. 水下无线光MIMO链路空间信道建模[J]. 电信科学, 2023, 39(5): 48-56. |
| [13] | 张嗣宏, 张健. 以ChatGPT为代表的生成式AI对通信行业的影响和应对思考[J]. 电信科学, 2023, 39(5): 67-75. |
| [14] | 马晓亮, 刘英, 杜德泉, 安玲玲. 运营商智能客服的关键技术和发展趋势[J]. 电信科学, 2023, 39(5): 76-89. |
| [15] | 唐鑫新, 曾学文, 凌致远, 宋磊. 可编程数据平面技术综述[J]. 电信科学, 2023, 39(4): 1-16. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
|
||