Wide area surveillance of urban environments using multiple mini-VTOL UAVs
1
2015
... 无人机在拥有部署容易、灵活性强和应用范围广等优点的同时也面临着一些挑战,比如其十分有限的电池容量和相对较弱的计算能力.近年来,随着无人机成本的降低和能力的提升,无人机不仅在军事战场上扮演着重要角色,在民用领域中的应用也越来越广泛,主要涉及监视和监控[1]、救灾应急[2]、精准农业[3]和网络覆盖[4]等方面.以上这些应用需要无人机开启摄像头或传感器从周围环境中实时获取大量信息,同时运用对象识别或图像处理等技术对收集到的数据进行分析.而收集和分析大量数据是一项非常耗费资源的计算密集型任务,计算密集型任务通常有数据量大和对计算能力需求高的特点.而无人机计算能力较弱,执行此类计算密集型任务不仅会导致时延过高,还会增加无人机的能量消耗,进而导致无人机续航时间降低.因此,无人机匮乏的机载资源的约束使得在无人机上部署计算密集型应用(如目标跟踪[5]等)变得十分困难. ...
Implementation for UAVs aided edge sensing system in wireless emergency communications
1
2019
... 无人机在拥有部署容易、灵活性强和应用范围广等优点的同时也面临着一些挑战,比如其十分有限的电池容量和相对较弱的计算能力.近年来,随着无人机成本的降低和能力的提升,无人机不仅在军事战场上扮演着重要角色,在民用领域中的应用也越来越广泛,主要涉及监视和监控[1]、救灾应急[2]、精准农业[3]和网络覆盖[4]等方面.以上这些应用需要无人机开启摄像头或传感器从周围环境中实时获取大量信息,同时运用对象识别或图像处理等技术对收集到的数据进行分析.而收集和分析大量数据是一项非常耗费资源的计算密集型任务,计算密集型任务通常有数据量大和对计算能力需求高的特点.而无人机计算能力较弱,执行此类计算密集型任务不仅会导致时延过高,还会增加无人机的能量消耗,进而导致无人机续航时间降低.因此,无人机匮乏的机载资源的约束使得在无人机上部署计算密集型应用(如目标跟踪[5]等)变得十分困难. ...
An autonomous multi-sensor UAV system for reduced-input precision agriculture applications
1
2016
... 无人机在拥有部署容易、灵活性强和应用范围广等优点的同时也面临着一些挑战,比如其十分有限的电池容量和相对较弱的计算能力.近年来,随着无人机成本的降低和能力的提升,无人机不仅在军事战场上扮演着重要角色,在民用领域中的应用也越来越广泛,主要涉及监视和监控[1]、救灾应急[2]、精准农业[3]和网络覆盖[4]等方面.以上这些应用需要无人机开启摄像头或传感器从周围环境中实时获取大量信息,同时运用对象识别或图像处理等技术对收集到的数据进行分析.而收集和分析大量数据是一项非常耗费资源的计算密集型任务,计算密集型任务通常有数据量大和对计算能力需求高的特点.而无人机计算能力较弱,执行此类计算密集型任务不仅会导致时延过高,还会增加无人机的能量消耗,进而导致无人机续航时间降低.因此,无人机匮乏的机载资源的约束使得在无人机上部署计算密集型应用(如目标跟踪[5]等)变得十分困难. ...
Wireless communications with unmanned aerial vehicles:opportunities and challenges
1
2016
... 无人机在拥有部署容易、灵活性强和应用范围广等优点的同时也面临着一些挑战,比如其十分有限的电池容量和相对较弱的计算能力.近年来,随着无人机成本的降低和能力的提升,无人机不仅在军事战场上扮演着重要角色,在民用领域中的应用也越来越广泛,主要涉及监视和监控[1]、救灾应急[2]、精准农业[3]和网络覆盖[4]等方面.以上这些应用需要无人机开启摄像头或传感器从周围环境中实时获取大量信息,同时运用对象识别或图像处理等技术对收集到的数据进行分析.而收集和分析大量数据是一项非常耗费资源的计算密集型任务,计算密集型任务通常有数据量大和对计算能力需求高的特点.而无人机计算能力较弱,执行此类计算密集型任务不仅会导致时延过高,还会增加无人机的能量消耗,进而导致无人机续航时间降低.因此,无人机匮乏的机载资源的约束使得在无人机上部署计算密集型应用(如目标跟踪[5]等)变得十分困难. ...
UAV-aided urban target tracking system based on edge computing
1
2020
... 无人机在拥有部署容易、灵活性强和应用范围广等优点的同时也面临着一些挑战,比如其十分有限的电池容量和相对较弱的计算能力.近年来,随着无人机成本的降低和能力的提升,无人机不仅在军事战场上扮演着重要角色,在民用领域中的应用也越来越广泛,主要涉及监视和监控[1]、救灾应急[2]、精准农业[3]和网络覆盖[4]等方面.以上这些应用需要无人机开启摄像头或传感器从周围环境中实时获取大量信息,同时运用对象识别或图像处理等技术对收集到的数据进行分析.而收集和分析大量数据是一项非常耗费资源的计算密集型任务,计算密集型任务通常有数据量大和对计算能力需求高的特点.而无人机计算能力较弱,执行此类计算密集型任务不仅会导致时延过高,还会增加无人机的能量消耗,进而导致无人机续航时间降低.因此,无人机匮乏的机载资源的约束使得在无人机上部署计算密集型应用(如目标跟踪[5]等)变得十分困难. ...
Mobile edge computing for cellular-connected UAV:computation offloading and trajectory optimization
4
2018
... 移动边缘计算(mobile edge computing,MEC)是一种由欧洲电信标准化协会(European Telecommunications Standards Institute,ETSI)于2014年提出的新兴技术,其可以很好地解决上述问题.移动边缘计算是一种可在网络边缘侧实现类似于云计算服务的网络架构,通过在地面基站中部署相当于“微云”的边缘服务器,周边的终端可以将在本地处理较为困难的数据委托给计算能力更强的边缘服务器进行处理,任务数据处理委托的过程也被称为任务卸载.相较于云计算中将任务卸载到中央云服务器的处理方式,移动边缘计算将任务卸载到位于网络边缘的边缘服务器,很大程度上降低了任务时延,从而被更加广泛地应用于各种服务.近年来,研究人员提出当在本地处理无人机收集的数据需要耗费大量能量和计算开销时,可以将这些计算密集型的任务分配给邻近的边缘服务器,边缘服务器处理完成后再将结果返还给无人机[6].得益于移动边缘计算架构,无人机可以执行更加复杂的任务,然后将计算密集型任务卸载到边缘服务器上,这不仅能够降低任务时延,同时也能降低无人机的能耗,使其拥有更长的续航时间. ...
... 根据优化目标对面向无人机网络的边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化无人机能耗 | [23][24] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化时延 | [6][25][26] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化效用 | [27][28][29][30] | 综合考虑无人机能耗和任务时延,根据不同任务的具体需求,赋予能耗和时延不同的权值,通过优化最小化能耗和时延的加权和,实现效用最大化 | 综合考虑能耗和时延影响的任务 |
3.1 最小化无人机能耗 为了在保障服务质量要求的条件下尽可能地延长无人机的续航时间,可采取最小化无人机能耗的卸载决策.无人机将计算量较大的任务卸载到地面基站,产生的能耗主要由无人机飞行或悬停产生的能耗、无人机本地计算产生的能耗和将任务卸载到地面基站产生的通信能耗3个部分构成.根据不同的场景,需要考虑对应的能耗表达式,并通过相应的优化方法来实现无人机能耗的最小化. ...
... 参考文献[25]考虑了在不同时延约束下多个边缘服务器为单个无人机提供计算卸载服务的问题,采用拉格朗日乘子法优化数据传输速率,采用基于模拟退火的粒子群优化算法解决任务分配,从而满足不同业务的服务质量(quality of service,QoS)要求.在时延约束条件不太严格的情况下,优化数据传输速率和任务分配方案,使无人机能量消耗最小化;而对于时延敏感型业务,应该采用尽可能高的数据传输速率来找到最省时的分配方案,使时延最小化.实验结果表明,相比于只选择一台边缘服务器按照贪婪算法进行计算的无合作策略和将计算任务平均分配到多个边缘服务器上的平均分配策略,采用基于模拟退火的粒子群优化算法的解决方案的最低时延优于平均分配策略和无合作策略.参考文献[6]讨论了单个无人机从初始位置飞往最终位置的过程中,将计算任务卸载到沿途5个地面基站的场景.在满足无人机最大速度限制和地面基站计算能力有限的情况下,采用交替优化和逐次凸逼近技术联合优化无人机路径和卸载决策方案,使无人机的任务完成时间最小化.参考文献[26]构建了一种包括一个集中式顶部无人机和一群分布式底部无人机的场景,利用随机几何和排队理论,得到了闭环解的最优响应时延.从实验仿真结果可以看出,与不使用 MEC 的传统算法相比,采用这种方法时,无人机传输到控制中心的视频流服务数据包总数减少89.9%. ...
... 根据涉及的方法对面向无人机网络的边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[6][23][25] | 参考文献[24][26][27][28][29] |
| 智能方法 | 无 | 参考文献[30] |
从表2可以得出以下结论:第一,目前面向无人机网络的边缘计算大多采用非智能方法,结合智能方法进行边缘计算卸载的研究较少;第二,采用如Q-Learning的智能方法进行任务卸载的效果明显优于采用传统算法,智能方法相较于传统算法能够更好地适应复杂、动态的网络环境;第三,目前面向无人机网络的边缘计算研究只考虑降低无人机能耗和任务时延这两个方面,还没有与提高任务卸载量相关的工作.目前面向无人机网络的边缘智能计算研究中,很少有考虑卸载安全的,而在实际应用场景特别是军事战场环境中,无人机卸载过程中的信息安全尤为重要,因此如何保障数据的安全传输是一个值得深入研究的问题. ...
Enable device-to-device communications underlaying cellular networks:challenges and research aspects
1
2014
... 基于无人机的边缘计算是指将边缘计算架构与无人机平台结合,无人机可以作为用户节点将计算密集型任务卸载到位于地面基站的边缘服务器上,也可以作为空中的边缘服务器为多个地面用户节点提供计算卸载服务.随着物联网技术和边缘智能的飞速发展(例如智能手机、平板电脑、可穿戴设备等物联网移动设备数量呈爆炸式增长)物联网移动设备上新兴多样的智能应用程序,如人脸识别、增强现实等让移动用户享受到了高质量的体验[7].然而,这些应用程序大多是计算密集型任务,需要消耗大量能量,由于物联网移动设备的计算资源和电池容量有限,执行这些应用十分具有挑战性[8].利用移动边缘计算技术,物联网移动设备可以将部分复杂的计算密集型任务卸载到具有强大计算能力的边缘服务器上,这样可以大大降低设备的能耗.而传统的边缘服务器通常被安装在固定位置的蜂窝基站中,这使得它们在因自然灾害受损或面对突发的大型户外活动时,无法有效地为物联网移动设备提供计算卸载服务.随着无人机技术的不断突破和提高,将边缘服务器配备到无人机上成为一种好的方式,与传统架构相比,搭载边缘服务器的无人机凭借其部署速度快、可扩展性强、机动灵活等优势,能够更加高效地为物联网移动设备提供计算卸载服务. ...
An energy efficient and spectrum efficient wireless heterogeneous network framework for 5G systems
2
2014
... 基于无人机的边缘计算是指将边缘计算架构与无人机平台结合,无人机可以作为用户节点将计算密集型任务卸载到位于地面基站的边缘服务器上,也可以作为空中的边缘服务器为多个地面用户节点提供计算卸载服务.随着物联网技术和边缘智能的飞速发展(例如智能手机、平板电脑、可穿戴设备等物联网移动设备数量呈爆炸式增长)物联网移动设备上新兴多样的智能应用程序,如人脸识别、增强现实等让移动用户享受到了高质量的体验[7].然而,这些应用程序大多是计算密集型任务,需要消耗大量能量,由于物联网移动设备的计算资源和电池容量有限,执行这些应用十分具有挑战性[8].利用移动边缘计算技术,物联网移动设备可以将部分复杂的计算密集型任务卸载到具有强大计算能力的边缘服务器上,这样可以大大降低设备的能耗.而传统的边缘服务器通常被安装在固定位置的蜂窝基站中,这使得它们在因自然灾害受损或面对突发的大型户外活动时,无法有效地为物联网移动设备提供计算卸载服务.随着无人机技术的不断突破和提高,将边缘服务器配备到无人机上成为一种好的方式,与传统架构相比,搭载边缘服务器的无人机凭借其部署速度快、可扩展性强、机动灵活等优势,能够更加高效地为物联网移动设备提供计算卸载服务. ...
... 与上面提到的文献不同,参考文献[9]和参考文献[39]考虑了多无人机边缘计算场景,结合智能方法,多架无人机协同为地面用户提供计算卸载服务.参考文献[9]首先提出了基于凸优化的路径控制算法(convex optimization based trajectory control algorithm,CAT),将CAT算法分解成无人机路径优化和用户关联与资源分配两个子问题,通过交替优化迭代最终实现最小化所有用户设备的总能耗.面对动态环境需要实时决策的要求,参考文献[8]又提出了基于深度强化学习的轨迹控制算法(deep reinforcement learning based trajectory control algorithm, RAT),将所有用户设备的总能耗的相反数作为RAT算法的奖励,无人机通过选择合适的飞行方向和距离来获取最佳的奖励.此外,参考文献[9]还提出一种低复杂度的匹配算法来确定用户关联与资源分配.与 CAT 算法需要迭代且易受初始位置影响不同,RAT算法因为在训练阶段会随机产生大量初始位置用于训练神经网络,所以其能够在训练完成后适应任何初始起飞位置,且能非常快速地获得解决方案.对比结果显示,RAT算法能够达到与CAT算法相当的性能,与传统算法相比,能够相当大程度地降低用户设备总能耗.参考文献[39]研究了一个多架无人机作为移动边缘计算平台为多个地面用户设备提供计算卸载服务的系统.为最小化所有用户设备总能耗,参考文献[39]提出了一种基于强化学习的用户关联与资源分配算法,以当前时刻有哪些设备将任务卸载到哪些无人机为当前状态,以用户设备能耗的相反数为奖励,用户设备根据当前状态做出本地计算或将任务卸载到某个无人机的动作来获取最大的奖励,最终实现所有用户设备总能耗最小化.仿真实验结果表明,所提出的方案与穷举法方案具有相同的性能,两者都能实现最小的能量消耗,优于随机卸载方案和只选择最近无人机卸载的贪婪卸载方案,大大优于仅在本地计算的方案. ...
Deep reinforcement learning based dynamic trajectory control for UAV-assisted mobile edge computing
6
2019
... 人工智能作为近年来非常热门的研究方向之一,将其与基于无人机的边缘计算结合能够赋予这种架构极大的能力.相较于普通边缘计算,边缘智能计算能够利用智能方法解决无人机边缘计算中的连接策略、资源管理等问题,同时也能为地面用户或无人机用户运行的智能应用提供计算服务.基于无人机的边缘智能计算在无人机上搭载了高性能芯片和深度强化学习等人工智能算法,这使其在拥有计算能力的同时也具备良好的决策能力,无人机能够根据当前信道状态、地面节点分布状况以及无人机自身位置等环境信息做出最优决策来执行下一步的动作,同时利用自身机动性强的优点,更加快速灵活地为一片区域内的多个用户设备提供计算卸载服务.如参考文献[9]中提出的基于深度强化学习的轨迹控制算法,其将所有用户的总能耗的相反数作为奖励,无人机根据当前环境状态等实时信息规划下一步的飞行路径,得到最大奖励,从而实现用户总能耗最小化.此外,在面向无人机网络的场景中,可在无人机上部署智能方法,如参考文献[10]中提到的无人机先用深度学习模型对捕获的图像进行预处理,提取出有用的信息后再将这些数据传输到位于地面的边缘服务器上进行进一步的分析,相较于直接传输原始数据,这种方法能够在很大程度上减少通信负载. ...
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 与上面提到的文献不同,参考文献[9]和参考文献[39]考虑了多无人机边缘计算场景,结合智能方法,多架无人机协同为地面用户提供计算卸载服务.参考文献[9]首先提出了基于凸优化的路径控制算法(convex optimization based trajectory control algorithm,CAT),将CAT算法分解成无人机路径优化和用户关联与资源分配两个子问题,通过交替优化迭代最终实现最小化所有用户设备的总能耗.面对动态环境需要实时决策的要求,参考文献[8]又提出了基于深度强化学习的轨迹控制算法(deep reinforcement learning based trajectory control algorithm, RAT),将所有用户设备的总能耗的相反数作为RAT算法的奖励,无人机通过选择合适的飞行方向和距离来获取最佳的奖励.此外,参考文献[9]还提出一种低复杂度的匹配算法来确定用户关联与资源分配.与 CAT 算法需要迭代且易受初始位置影响不同,RAT算法因为在训练阶段会随机产生大量初始位置用于训练神经网络,所以其能够在训练完成后适应任何初始起飞位置,且能非常快速地获得解决方案.对比结果显示,RAT算法能够达到与CAT算法相当的性能,与传统算法相比,能够相当大程度地降低用户设备总能耗.参考文献[39]研究了一个多架无人机作为移动边缘计算平台为多个地面用户设备提供计算卸载服务的系统.为最小化所有用户设备总能耗,参考文献[39]提出了一种基于强化学习的用户关联与资源分配算法,以当前时刻有哪些设备将任务卸载到哪些无人机为当前状态,以用户设备能耗的相反数为奖励,用户设备根据当前状态做出本地计算或将任务卸载到某个无人机的动作来获取最大的奖励,最终实现所有用户设备总能耗最小化.仿真实验结果表明,所提出的方案与穷举法方案具有相同的性能,两者都能实现最小的能量消耗,优于随机卸载方案和只选择最近无人机卸载的贪婪卸载方案,大大优于仅在本地计算的方案. ...
... ]考虑了多无人机边缘计算场景,结合智能方法,多架无人机协同为地面用户提供计算卸载服务.参考文献[9]首先提出了基于凸优化的路径控制算法(convex optimization based trajectory control algorithm,CAT),将CAT算法分解成无人机路径优化和用户关联与资源分配两个子问题,通过交替优化迭代最终实现最小化所有用户设备的总能耗.面对动态环境需要实时决策的要求,参考文献[8]又提出了基于深度强化学习的轨迹控制算法(deep reinforcement learning based trajectory control algorithm, RAT),将所有用户设备的总能耗的相反数作为RAT算法的奖励,无人机通过选择合适的飞行方向和距离来获取最佳的奖励.此外,参考文献[9]还提出一种低复杂度的匹配算法来确定用户关联与资源分配.与 CAT 算法需要迭代且易受初始位置影响不同,RAT算法因为在训练阶段会随机产生大量初始位置用于训练神经网络,所以其能够在训练完成后适应任何初始起飞位置,且能非常快速地获得解决方案.对比结果显示,RAT算法能够达到与CAT算法相当的性能,与传统算法相比,能够相当大程度地降低用户设备总能耗.参考文献[39]研究了一个多架无人机作为移动边缘计算平台为多个地面用户设备提供计算卸载服务的系统.为最小化所有用户设备总能耗,参考文献[39]提出了一种基于强化学习的用户关联与资源分配算法,以当前时刻有哪些设备将任务卸载到哪些无人机为当前状态,以用户设备能耗的相反数为奖励,用户设备根据当前状态做出本地计算或将任务卸载到某个无人机的动作来获取最大的奖励,最终实现所有用户设备总能耗最小化.仿真实验结果表明,所提出的方案与穷举法方案具有相同的性能,两者都能实现最小的能量消耗,优于随机卸载方案和只选择最近无人机卸载的贪婪卸载方案,大大优于仅在本地计算的方案. ...
... ]又提出了基于深度强化学习的轨迹控制算法(deep reinforcement learning based trajectory control algorithm, RAT),将所有用户设备的总能耗的相反数作为RAT算法的奖励,无人机通过选择合适的飞行方向和距离来获取最佳的奖励.此外,参考文献[9]还提出一种低复杂度的匹配算法来确定用户关联与资源分配.与 CAT 算法需要迭代且易受初始位置影响不同,RAT算法因为在训练阶段会随机产生大量初始位置用于训练神经网络,所以其能够在训练完成后适应任何初始起飞位置,且能非常快速地获得解决方案.对比结果显示,RAT算法能够达到与CAT算法相当的性能,与传统算法相比,能够相当大程度地降低用户设备总能耗.参考文献[39]研究了一个多架无人机作为移动边缘计算平台为多个地面用户设备提供计算卸载服务的系统.为最小化所有用户设备总能耗,参考文献[39]提出了一种基于强化学习的用户关联与资源分配算法,以当前时刻有哪些设备将任务卸载到哪些无人机为当前状态,以用户设备能耗的相反数为奖励,用户设备根据当前状态做出本地计算或将任务卸载到某个无人机的动作来获取最大的奖励,最终实现所有用户设备总能耗最小化.仿真实验结果表明,所提出的方案与穷举法方案具有相同的性能,两者都能实现最小的能量消耗,优于随机卸载方案和只选择最近无人机卸载的贪婪卸载方案,大大优于仅在本地计算的方案. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
edge-assisted learning for real-time UAV imagery via predictive offloading
1
2019
... 人工智能作为近年来非常热门的研究方向之一,将其与基于无人机的边缘计算结合能够赋予这种架构极大的能力.相较于普通边缘计算,边缘智能计算能够利用智能方法解决无人机边缘计算中的连接策略、资源管理等问题,同时也能为地面用户或无人机用户运行的智能应用提供计算服务.基于无人机的边缘智能计算在无人机上搭载了高性能芯片和深度强化学习等人工智能算法,这使其在拥有计算能力的同时也具备良好的决策能力,无人机能够根据当前信道状态、地面节点分布状况以及无人机自身位置等环境信息做出最优决策来执行下一步的动作,同时利用自身机动性强的优点,更加快速灵活地为一片区域内的多个用户设备提供计算卸载服务.如参考文献[9]中提出的基于深度强化学习的轨迹控制算法,其将所有用户的总能耗的相反数作为奖励,无人机根据当前环境状态等实时信息规划下一步的飞行路径,得到最大奖励,从而实现用户总能耗最小化.此外,在面向无人机网络的场景中,可在无人机上部署智能方法,如参考文献[10]中提到的无人机先用深度学习模型对捕获的图像进行预处理,提取出有用的信息后再将这些数据传输到位于地面的边缘服务器上进行进一步的分析,相较于直接传输原始数据,这种方法能够在很大程度上减少通信负载. ...
A survey on mobile edge computing:focusing on service adoption and provision
1
2018
... 目前已有许多针对移动边缘计算的综述,但均未涉及无人机.参考文献[11]和参考文献[12]分别从服务提供和服务迁移的角度对现有的 MEC 研究进行了全面的综述,参考文献[13]从卸载决策、资源分配和移动性管理3个方面对MEC当前工作进行了总结,参考文献[14]从联合无线电和计算资源管理方面着手对现有MEC研究进行了整理,参考文献[15]全面地综述了移动边缘网络的计算、缓存和通信技术,参考文献[16]对近年来MEC的相关研究和技术进展进行了梳理,参考文献[17]根据不同需求下采用的卸载决策对当前 MEC 的研究工作进行了分类和总结.与上述综述文献不同,基于无人机的边缘智能计算存在一般边缘计算未曾涉及的无人机路径规划等关键问题,而目前尚未有此类无人机边缘智能计算的相关综述,故本文对现有基于无人机的边缘智能计算研究进行了整理和综述.文章主要贡献如下:第一,针对当前基于无人机的边缘智能计算研究的应用场景,从无人机作为用户节点和边缘服务器两个角度对相关研究进行了分类和介绍;第二,对两个应用场景下不同的优化目标的研究进行了梳理与总结;第三,对当前工作的局限性进行了分析,并对未来的研究方向进行了展望. ...
A survey on service migration in mobile edge computing
1
2018
... 目前已有许多针对移动边缘计算的综述,但均未涉及无人机.参考文献[11]和参考文献[12]分别从服务提供和服务迁移的角度对现有的 MEC 研究进行了全面的综述,参考文献[13]从卸载决策、资源分配和移动性管理3个方面对MEC当前工作进行了总结,参考文献[14]从联合无线电和计算资源管理方面着手对现有MEC研究进行了整理,参考文献[15]全面地综述了移动边缘网络的计算、缓存和通信技术,参考文献[16]对近年来MEC的相关研究和技术进展进行了梳理,参考文献[17]根据不同需求下采用的卸载决策对当前 MEC 的研究工作进行了分类和总结.与上述综述文献不同,基于无人机的边缘智能计算存在一般边缘计算未曾涉及的无人机路径规划等关键问题,而目前尚未有此类无人机边缘智能计算的相关综述,故本文对现有基于无人机的边缘智能计算研究进行了整理和综述.文章主要贡献如下:第一,针对当前基于无人机的边缘智能计算研究的应用场景,从无人机作为用户节点和边缘服务器两个角度对相关研究进行了分类和介绍;第二,对两个应用场景下不同的优化目标的研究进行了梳理与总结;第三,对当前工作的局限性进行了分析,并对未来的研究方向进行了展望. ...
Mobile edge computing:a survey on architecture and computation offloading
1
2017
... 目前已有许多针对移动边缘计算的综述,但均未涉及无人机.参考文献[11]和参考文献[12]分别从服务提供和服务迁移的角度对现有的 MEC 研究进行了全面的综述,参考文献[13]从卸载决策、资源分配和移动性管理3个方面对MEC当前工作进行了总结,参考文献[14]从联合无线电和计算资源管理方面着手对现有MEC研究进行了整理,参考文献[15]全面地综述了移动边缘网络的计算、缓存和通信技术,参考文献[16]对近年来MEC的相关研究和技术进展进行了梳理,参考文献[17]根据不同需求下采用的卸载决策对当前 MEC 的研究工作进行了分类和总结.与上述综述文献不同,基于无人机的边缘智能计算存在一般边缘计算未曾涉及的无人机路径规划等关键问题,而目前尚未有此类无人机边缘智能计算的相关综述,故本文对现有基于无人机的边缘智能计算研究进行了整理和综述.文章主要贡献如下:第一,针对当前基于无人机的边缘智能计算研究的应用场景,从无人机作为用户节点和边缘服务器两个角度对相关研究进行了分类和介绍;第二,对两个应用场景下不同的优化目标的研究进行了梳理与总结;第三,对当前工作的局限性进行了分析,并对未来的研究方向进行了展望. ...
A survey on mobile edge computing:the communication perspective
1
2017
... 目前已有许多针对移动边缘计算的综述,但均未涉及无人机.参考文献[11]和参考文献[12]分别从服务提供和服务迁移的角度对现有的 MEC 研究进行了全面的综述,参考文献[13]从卸载决策、资源分配和移动性管理3个方面对MEC当前工作进行了总结,参考文献[14]从联合无线电和计算资源管理方面着手对现有MEC研究进行了整理,参考文献[15]全面地综述了移动边缘网络的计算、缓存和通信技术,参考文献[16]对近年来MEC的相关研究和技术进展进行了梳理,参考文献[17]根据不同需求下采用的卸载决策对当前 MEC 的研究工作进行了分类和总结.与上述综述文献不同,基于无人机的边缘智能计算存在一般边缘计算未曾涉及的无人机路径规划等关键问题,而目前尚未有此类无人机边缘智能计算的相关综述,故本文对现有基于无人机的边缘智能计算研究进行了整理和综述.文章主要贡献如下:第一,针对当前基于无人机的边缘智能计算研究的应用场景,从无人机作为用户节点和边缘服务器两个角度对相关研究进行了分类和介绍;第二,对两个应用场景下不同的优化目标的研究进行了梳理与总结;第三,对当前工作的局限性进行了分析,并对未来的研究方向进行了展望. ...
A survey on mobile edge networks:convergence of computing,caching and communications
1
2017
... 目前已有许多针对移动边缘计算的综述,但均未涉及无人机.参考文献[11]和参考文献[12]分别从服务提供和服务迁移的角度对现有的 MEC 研究进行了全面的综述,参考文献[13]从卸载决策、资源分配和移动性管理3个方面对MEC当前工作进行了总结,参考文献[14]从联合无线电和计算资源管理方面着手对现有MEC研究进行了整理,参考文献[15]全面地综述了移动边缘网络的计算、缓存和通信技术,参考文献[16]对近年来MEC的相关研究和技术进展进行了梳理,参考文献[17]根据不同需求下采用的卸载决策对当前 MEC 的研究工作进行了分类和总结.与上述综述文献不同,基于无人机的边缘智能计算存在一般边缘计算未曾涉及的无人机路径规划等关键问题,而目前尚未有此类无人机边缘智能计算的相关综述,故本文对现有基于无人机的边缘智能计算研究进行了整理和综述.文章主要贡献如下:第一,针对当前基于无人机的边缘智能计算研究的应用场景,从无人机作为用户节点和边缘服务器两个角度对相关研究进行了分类和介绍;第二,对两个应用场景下不同的优化目标的研究进行了梳理与总结;第三,对当前工作的局限性进行了分析,并对未来的研究方向进行了展望. ...
Mobile edge computing:a survey
1
2017
... 目前已有许多针对移动边缘计算的综述,但均未涉及无人机.参考文献[11]和参考文献[12]分别从服务提供和服务迁移的角度对现有的 MEC 研究进行了全面的综述,参考文献[13]从卸载决策、资源分配和移动性管理3个方面对MEC当前工作进行了总结,参考文献[14]从联合无线电和计算资源管理方面着手对现有MEC研究进行了整理,参考文献[15]全面地综述了移动边缘网络的计算、缓存和通信技术,参考文献[16]对近年来MEC的相关研究和技术进展进行了梳理,参考文献[17]根据不同需求下采用的卸载决策对当前 MEC 的研究工作进行了分类和总结.与上述综述文献不同,基于无人机的边缘智能计算存在一般边缘计算未曾涉及的无人机路径规划等关键问题,而目前尚未有此类无人机边缘智能计算的相关综述,故本文对现有基于无人机的边缘智能计算研究进行了整理和综述.文章主要贡献如下:第一,针对当前基于无人机的边缘智能计算研究的应用场景,从无人机作为用户节点和边缘服务器两个角度对相关研究进行了分类和介绍;第二,对两个应用场景下不同的优化目标的研究进行了梳理与总结;第三,对当前工作的局限性进行了分析,并对未来的研究方向进行了展望. ...
移动边缘计算中的计算卸载策略研究综述
1
2019
... 目前已有许多针对移动边缘计算的综述,但均未涉及无人机.参考文献[11]和参考文献[12]分别从服务提供和服务迁移的角度对现有的 MEC 研究进行了全面的综述,参考文献[13]从卸载决策、资源分配和移动性管理3个方面对MEC当前工作进行了总结,参考文献[14]从联合无线电和计算资源管理方面着手对现有MEC研究进行了整理,参考文献[15]全面地综述了移动边缘网络的计算、缓存和通信技术,参考文献[16]对近年来MEC的相关研究和技术进展进行了梳理,参考文献[17]根据不同需求下采用的卸载决策对当前 MEC 的研究工作进行了分类和总结.与上述综述文献不同,基于无人机的边缘智能计算存在一般边缘计算未曾涉及的无人机路径规划等关键问题,而目前尚未有此类无人机边缘智能计算的相关综述,故本文对现有基于无人机的边缘智能计算研究进行了整理和综述.文章主要贡献如下:第一,针对当前基于无人机的边缘智能计算研究的应用场景,从无人机作为用户节点和边缘服务器两个角度对相关研究进行了分类和介绍;第二,对两个应用场景下不同的优化目标的研究进行了梳理与总结;第三,对当前工作的局限性进行了分析,并对未来的研究方向进行了展望. ...
移动边缘计算中的计算卸载策略研究综述
1
2019
... 目前已有许多针对移动边缘计算的综述,但均未涉及无人机.参考文献[11]和参考文献[12]分别从服务提供和服务迁移的角度对现有的 MEC 研究进行了全面的综述,参考文献[13]从卸载决策、资源分配和移动性管理3个方面对MEC当前工作进行了总结,参考文献[14]从联合无线电和计算资源管理方面着手对现有MEC研究进行了整理,参考文献[15]全面地综述了移动边缘网络的计算、缓存和通信技术,参考文献[16]对近年来MEC的相关研究和技术进展进行了梳理,参考文献[17]根据不同需求下采用的卸载决策对当前 MEC 的研究工作进行了分类和总结.与上述综述文献不同,基于无人机的边缘智能计算存在一般边缘计算未曾涉及的无人机路径规划等关键问题,而目前尚未有此类无人机边缘智能计算的相关综述,故本文对现有基于无人机的边缘智能计算研究进行了整理和综述.文章主要贡献如下:第一,针对当前基于无人机的边缘智能计算研究的应用场景,从无人机作为用户节点和边缘服务器两个角度对相关研究进行了分类和介绍;第二,对两个应用场景下不同的优化目标的研究进行了梳理与总结;第三,对当前工作的局限性进行了分析,并对未来的研究方向进行了展望. ...
When UAV swarm meets edge-cloud computing:the QoS perspective
1
2019
... 在面向无人机网络的边缘智能计算的场景中,多架无人机联合执行任务,无人机之间通过空空链路进行连接.无人机将图像分析等计算密集型任务卸载到位于地面基站的边缘服务器上,边缘服务器完成任务处理后将结果返还给无人机,通过这种方式可以大大降低无人机的能耗和任务的处理时延,从而延长无人机的续航时间,并提升用户的使用体验.也可采用参考文献[18]中提出的无人机-边缘-云3 层架构,结合无人机群、边缘服务器和云服务器各自的优点,保障无人机上运行的计算密集型任务的服务质量,这种混合架构可以通过将复杂度高的任务卸载到边缘和云端来显著降低时延和能耗.参考文献[19]利用这种 3 层架构发挥了无人机在探测森林火灾方面的卓越潜力,通过联合优化实现资源最优分配,使决策的平均时间最小化,从而在野火到达不可控状态之前尽早发现火情. ...
Edge computing in IoT ecosystems for UAV-enabled early fire detection
1
2018
... 在面向无人机网络的边缘智能计算的场景中,多架无人机联合执行任务,无人机之间通过空空链路进行连接.无人机将图像分析等计算密集型任务卸载到位于地面基站的边缘服务器上,边缘服务器完成任务处理后将结果返还给无人机,通过这种方式可以大大降低无人机的能耗和任务的处理时延,从而延长无人机的续航时间,并提升用户的使用体验.也可采用参考文献[18]中提出的无人机-边缘-云3 层架构,结合无人机群、边缘服务器和云服务器各自的优点,保障无人机上运行的计算密集型任务的服务质量,这种混合架构可以通过将复杂度高的任务卸载到边缘和云端来显著降低时延和能耗.参考文献[19]利用这种 3 层架构发挥了无人机在探测森林火灾方面的卓越潜力,通过联合优化实现资源最优分配,使决策的平均时间最小化,从而在野火到达不可控状态之前尽早发现火情. ...
Air-ground integrated mobile edge networks:architecture,challenges,and opportunities
1
2018
... 在面向地面网络的无人机边缘智能计算场景中,通过在无人机上配备边缘服务器为地面的用户设备提供计算卸载服务.在用户设备-无人机-地面基站3层架构中,对于用户设备因为阻塞或其他原因无法将计算任务直接卸载到地面基站的服务器上的场景,用户设备可以把计算密集型任务卸载到无人机上,或者通过无人机中继将部分任务进一步卸载到地面基站中计算能力更强的服务器上.参考文献[20]提出的空地一体移动边缘网络中,除了提供通信和缓存服务外,无人机还可作为边缘服务器为地面用户提供高带宽、低时延的计算任务卸载服务,地面用户可将虚拟现实和图像处理等计算密集型任务卸载到无人机上的边缘服务器中进行处理.参考文献[21]研究了当 MEC 系统中存在第三方窃听者时任务数据的安全卸载问题.参考文献[22]提出了一种基于差分演化的多无人机部署机制,实现无人机的负载均衡,并在此基础上使用一种基于深度强化学习的无人机任务调度算法,提高了无人机的任务执行效率. ...
Secure communications for UAV-enabled mobile edge computing systems
1
2020
... 在面向地面网络的无人机边缘智能计算场景中,通过在无人机上配备边缘服务器为地面的用户设备提供计算卸载服务.在用户设备-无人机-地面基站3层架构中,对于用户设备因为阻塞或其他原因无法将计算任务直接卸载到地面基站的服务器上的场景,用户设备可以把计算密集型任务卸载到无人机上,或者通过无人机中继将部分任务进一步卸载到地面基站中计算能力更强的服务器上.参考文献[20]提出的空地一体移动边缘网络中,除了提供通信和缓存服务外,无人机还可作为边缘服务器为地面用户提供高带宽、低时延的计算任务卸载服务,地面用户可将虚拟现实和图像处理等计算密集型任务卸载到无人机上的边缘服务器中进行处理.参考文献[21]研究了当 MEC 系统中存在第三方窃听者时任务数据的安全卸载问题.参考文献[22]提出了一种基于差分演化的多无人机部署机制,实现无人机的负载均衡,并在此基础上使用一种基于深度强化学习的无人机任务调度算法,提高了无人机的任务执行效率. ...
Multi-UAV enabled load-balance mobile edge computing for IoT networks
1
2020
... 在面向地面网络的无人机边缘智能计算场景中,通过在无人机上配备边缘服务器为地面的用户设备提供计算卸载服务.在用户设备-无人机-地面基站3层架构中,对于用户设备因为阻塞或其他原因无法将计算任务直接卸载到地面基站的服务器上的场景,用户设备可以把计算密集型任务卸载到无人机上,或者通过无人机中继将部分任务进一步卸载到地面基站中计算能力更强的服务器上.参考文献[20]提出的空地一体移动边缘网络中,除了提供通信和缓存服务外,无人机还可作为边缘服务器为地面用户提供高带宽、低时延的计算任务卸载服务,地面用户可将虚拟现实和图像处理等计算密集型任务卸载到无人机上的边缘服务器中进行处理.参考文献[21]研究了当 MEC 系统中存在第三方窃听者时任务数据的安全卸载问题.参考文献[22]提出了一种基于差分演化的多无人机部署机制,实现无人机的负载均衡,并在此基础上使用一种基于深度强化学习的无人机任务调度算法,提高了无人机的任务执行效率. ...
Energy optimization for cellular-connected UAV mobile edge computing systems
5
2018
... 根据优化目标对面向无人机网络的边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化无人机能耗 | [23][24] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化时延 | [6][25][26] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化效用 | [27][28][29][30] | 综合考虑无人机能耗和任务时延,根据不同任务的具体需求,赋予能耗和时延不同的权值,通过优化最小化能耗和时延的加权和,实现效用最大化 | 综合考虑能耗和时延影响的任务 |
3.1 最小化无人机能耗 为了在保障服务质量要求的条件下尽可能地延长无人机的续航时间,可采取最小化无人机能耗的卸载决策.无人机将计算量较大的任务卸载到地面基站,产生的能耗主要由无人机飞行或悬停产生的能耗、无人机本地计算产生的能耗和将任务卸载到地面基站产生的通信能耗3个部分构成.根据不同的场景,需要考虑对应的能耗表达式,并通过相应的优化方法来实现无人机能耗的最小化. ...
... 参考文献[23]介绍了一种一个地面基站为单个无人机提供计算卸载服务的场景,无人机从初始位置飞往最终位置,期间一部分任务在本地进行计算,另一部分卸载到地面基站进行计算,通过联合优化无人机飞行路径和比特分配,用逐次凸逼近的方法得到无人机能耗最小值的次优解,其中无人机能耗只考虑飞行能耗和计算能耗.仿真的数值结果表明,此方案无人机的总能耗明显优于最小飞行能耗方案的总能耗,无人机的飞行能耗和计算能耗之间存在一定的权衡关系.参考文献[24]在参考文献[23]的基础上讨论了多无人机移动边缘计算系统的能耗问题,而且与参考文献[23]只考虑飞行能耗和计算能耗不同,参考文献[24]还考虑了通信能耗,同时提出了时分多址(time division multiple access,TDMA)、正交频分多址(orthogonal frequency division multiple access,OFDMA)、one-by-one和非正交多址接入(non-orthogonal multiple access, NOMA)4 种不同的接入方案,并评估它们对系统性能的影响.仿真结果显示,NOMA方案优于其他3种方案,不过差距并不明显,而用于NOMA的串行干扰消除(successive interference cancellation, SIC)技术可能会带来额外的干扰和实现复杂性,因此这4种方法需要在实现复杂性和性能收益之间进行权衡.当然,与最小飞行能耗方案相比,这4种方案都节省了大量的能量. ...
... ]在参考文献[23]的基础上讨论了多无人机移动边缘计算系统的能耗问题,而且与参考文献[23]只考虑飞行能耗和计算能耗不同,参考文献[24]还考虑了通信能耗,同时提出了时分多址(time division multiple access,TDMA)、正交频分多址(orthogonal frequency division multiple access,OFDMA)、one-by-one和非正交多址接入(non-orthogonal multiple access, NOMA)4 种不同的接入方案,并评估它们对系统性能的影响.仿真结果显示,NOMA方案优于其他3种方案,不过差距并不明显,而用于NOMA的串行干扰消除(successive interference cancellation, SIC)技术可能会带来额外的干扰和实现复杂性,因此这4种方法需要在实现复杂性和性能收益之间进行权衡.当然,与最小飞行能耗方案相比,这4种方案都节省了大量的能量. ...
... ]的基础上讨论了多无人机移动边缘计算系统的能耗问题,而且与参考文献[23]只考虑飞行能耗和计算能耗不同,参考文献[24]还考虑了通信能耗,同时提出了时分多址(time division multiple access,TDMA)、正交频分多址(orthogonal frequency division multiple access,OFDMA)、one-by-one和非正交多址接入(non-orthogonal multiple access, NOMA)4 种不同的接入方案,并评估它们对系统性能的影响.仿真结果显示,NOMA方案优于其他3种方案,不过差距并不明显,而用于NOMA的串行干扰消除(successive interference cancellation, SIC)技术可能会带来额外的干扰和实现复杂性,因此这4种方法需要在实现复杂性和性能收益之间进行权衡.当然,与最小飞行能耗方案相比,这4种方案都节省了大量的能量. ...
... 根据涉及的方法对面向无人机网络的边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[6][23][25] | 参考文献[24][26][27][28][29] |
| 智能方法 | 无 | 参考文献[30] |
从表2可以得出以下结论:第一,目前面向无人机网络的边缘计算大多采用非智能方法,结合智能方法进行边缘计算卸载的研究较少;第二,采用如Q-Learning的智能方法进行任务卸载的效果明显优于采用传统算法,智能方法相较于传统算法能够更好地适应复杂、动态的网络环境;第三,目前面向无人机网络的边缘计算研究只考虑降低无人机能耗和任务时延这两个方面,还没有与提高任务卸载量相关的工作.目前面向无人机网络的边缘智能计算研究中,很少有考虑卸载安全的,而在实际应用场景特别是军事战场环境中,无人机卸载过程中的信息安全尤为重要,因此如何保障数据的安全传输是一个值得深入研究的问题. ...
Energy optimization for cellular-connected multi-UAV mobile edge computing systems with multi-access schemes
4
2018
... 根据优化目标对面向无人机网络的边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化无人机能耗 | [23][24] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化时延 | [6][25][26] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化效用 | [27][28][29][30] | 综合考虑无人机能耗和任务时延,根据不同任务的具体需求,赋予能耗和时延不同的权值,通过优化最小化能耗和时延的加权和,实现效用最大化 | 综合考虑能耗和时延影响的任务 |
3.1 最小化无人机能耗 为了在保障服务质量要求的条件下尽可能地延长无人机的续航时间,可采取最小化无人机能耗的卸载决策.无人机将计算量较大的任务卸载到地面基站,产生的能耗主要由无人机飞行或悬停产生的能耗、无人机本地计算产生的能耗和将任务卸载到地面基站产生的通信能耗3个部分构成.根据不同的场景,需要考虑对应的能耗表达式,并通过相应的优化方法来实现无人机能耗的最小化. ...
... 参考文献[23]介绍了一种一个地面基站为单个无人机提供计算卸载服务的场景,无人机从初始位置飞往最终位置,期间一部分任务在本地进行计算,另一部分卸载到地面基站进行计算,通过联合优化无人机飞行路径和比特分配,用逐次凸逼近的方法得到无人机能耗最小值的次优解,其中无人机能耗只考虑飞行能耗和计算能耗.仿真的数值结果表明,此方案无人机的总能耗明显优于最小飞行能耗方案的总能耗,无人机的飞行能耗和计算能耗之间存在一定的权衡关系.参考文献[24]在参考文献[23]的基础上讨论了多无人机移动边缘计算系统的能耗问题,而且与参考文献[23]只考虑飞行能耗和计算能耗不同,参考文献[24]还考虑了通信能耗,同时提出了时分多址(time division multiple access,TDMA)、正交频分多址(orthogonal frequency division multiple access,OFDMA)、one-by-one和非正交多址接入(non-orthogonal multiple access, NOMA)4 种不同的接入方案,并评估它们对系统性能的影响.仿真结果显示,NOMA方案优于其他3种方案,不过差距并不明显,而用于NOMA的串行干扰消除(successive interference cancellation, SIC)技术可能会带来额外的干扰和实现复杂性,因此这4种方法需要在实现复杂性和性能收益之间进行权衡.当然,与最小飞行能耗方案相比,这4种方案都节省了大量的能量. ...
... ]只考虑飞行能耗和计算能耗不同,参考文献[24]还考虑了通信能耗,同时提出了时分多址(time division multiple access,TDMA)、正交频分多址(orthogonal frequency division multiple access,OFDMA)、one-by-one和非正交多址接入(non-orthogonal multiple access, NOMA)4 种不同的接入方案,并评估它们对系统性能的影响.仿真结果显示,NOMA方案优于其他3种方案,不过差距并不明显,而用于NOMA的串行干扰消除(successive interference cancellation, SIC)技术可能会带来额外的干扰和实现复杂性,因此这4种方法需要在实现复杂性和性能收益之间进行权衡.当然,与最小飞行能耗方案相比,这4种方案都节省了大量的能量. ...
... 根据涉及的方法对面向无人机网络的边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[6][23][25] | 参考文献[24][26][27][28][29] |
| 智能方法 | 无 | 参考文献[30] |
从表2可以得出以下结论:第一,目前面向无人机网络的边缘计算大多采用非智能方法,结合智能方法进行边缘计算卸载的研究较少;第二,采用如Q-Learning的智能方法进行任务卸载的效果明显优于采用传统算法,智能方法相较于传统算法能够更好地适应复杂、动态的网络环境;第三,目前面向无人机网络的边缘计算研究只考虑降低无人机能耗和任务时延这两个方面,还没有与提高任务卸载量相关的工作.目前面向无人机网络的边缘智能计算研究中,很少有考虑卸载安全的,而在实际应用场景特别是军事战场环境中,无人机卸载过程中的信息安全尤为重要,因此如何保障数据的安全传输是一个值得深入研究的问题. ...
Cooperative computation offloading for UAVs:a joint radio and computing resource allocation approach
3
2018
... 根据优化目标对面向无人机网络的边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化无人机能耗 | [23][24] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化时延 | [6][25][26] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化效用 | [27][28][29][30] | 综合考虑无人机能耗和任务时延,根据不同任务的具体需求,赋予能耗和时延不同的权值,通过优化最小化能耗和时延的加权和,实现效用最大化 | 综合考虑能耗和时延影响的任务 |
3.1 最小化无人机能耗 为了在保障服务质量要求的条件下尽可能地延长无人机的续航时间,可采取最小化无人机能耗的卸载决策.无人机将计算量较大的任务卸载到地面基站,产生的能耗主要由无人机飞行或悬停产生的能耗、无人机本地计算产生的能耗和将任务卸载到地面基站产生的通信能耗3个部分构成.根据不同的场景,需要考虑对应的能耗表达式,并通过相应的优化方法来实现无人机能耗的最小化. ...
... 参考文献[25]考虑了在不同时延约束下多个边缘服务器为单个无人机提供计算卸载服务的问题,采用拉格朗日乘子法优化数据传输速率,采用基于模拟退火的粒子群优化算法解决任务分配,从而满足不同业务的服务质量(quality of service,QoS)要求.在时延约束条件不太严格的情况下,优化数据传输速率和任务分配方案,使无人机能量消耗最小化;而对于时延敏感型业务,应该采用尽可能高的数据传输速率来找到最省时的分配方案,使时延最小化.实验结果表明,相比于只选择一台边缘服务器按照贪婪算法进行计算的无合作策略和将计算任务平均分配到多个边缘服务器上的平均分配策略,采用基于模拟退火的粒子群优化算法的解决方案的最低时延优于平均分配策略和无合作策略.参考文献[6]讨论了单个无人机从初始位置飞往最终位置的过程中,将计算任务卸载到沿途5个地面基站的场景.在满足无人机最大速度限制和地面基站计算能力有限的情况下,采用交替优化和逐次凸逼近技术联合优化无人机路径和卸载决策方案,使无人机的任务完成时间最小化.参考文献[26]构建了一种包括一个集中式顶部无人机和一群分布式底部无人机的场景,利用随机几何和排队理论,得到了闭环解的最优响应时延.从实验仿真结果可以看出,与不使用 MEC 的传统算法相比,采用这种方法时,无人机传输到控制中心的视频流服务数据包总数减少89.9%. ...
... 根据涉及的方法对面向无人机网络的边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[6][23][25] | 参考文献[24][26][27][28][29] |
| 智能方法 | 无 | 参考文献[30] |
从表2可以得出以下结论:第一,目前面向无人机网络的边缘计算大多采用非智能方法,结合智能方法进行边缘计算卸载的研究较少;第二,采用如Q-Learning的智能方法进行任务卸载的效果明显优于采用传统算法,智能方法相较于传统算法能够更好地适应复杂、动态的网络环境;第三,目前面向无人机网络的边缘计算研究只考虑降低无人机能耗和任务时延这两个方面,还没有与提高任务卸载量相关的工作.目前面向无人机网络的边缘智能计算研究中,很少有考虑卸载安全的,而在实际应用场景特别是军事战场环境中,无人机卸载过程中的信息安全尤为重要,因此如何保障数据的安全传输是一个值得深入研究的问题. ...
Response delay optimization in mobile edge computing enabled UAV swarm
3
2020
... 根据优化目标对面向无人机网络的边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化无人机能耗 | [23][24] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化时延 | [6][25][26] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化效用 | [27][28][29][30] | 综合考虑无人机能耗和任务时延,根据不同任务的具体需求,赋予能耗和时延不同的权值,通过优化最小化能耗和时延的加权和,实现效用最大化 | 综合考虑能耗和时延影响的任务 |
3.1 最小化无人机能耗 为了在保障服务质量要求的条件下尽可能地延长无人机的续航时间,可采取最小化无人机能耗的卸载决策.无人机将计算量较大的任务卸载到地面基站,产生的能耗主要由无人机飞行或悬停产生的能耗、无人机本地计算产生的能耗和将任务卸载到地面基站产生的通信能耗3个部分构成.根据不同的场景,需要考虑对应的能耗表达式,并通过相应的优化方法来实现无人机能耗的最小化. ...
... 参考文献[25]考虑了在不同时延约束下多个边缘服务器为单个无人机提供计算卸载服务的问题,采用拉格朗日乘子法优化数据传输速率,采用基于模拟退火的粒子群优化算法解决任务分配,从而满足不同业务的服务质量(quality of service,QoS)要求.在时延约束条件不太严格的情况下,优化数据传输速率和任务分配方案,使无人机能量消耗最小化;而对于时延敏感型业务,应该采用尽可能高的数据传输速率来找到最省时的分配方案,使时延最小化.实验结果表明,相比于只选择一台边缘服务器按照贪婪算法进行计算的无合作策略和将计算任务平均分配到多个边缘服务器上的平均分配策略,采用基于模拟退火的粒子群优化算法的解决方案的最低时延优于平均分配策略和无合作策略.参考文献[6]讨论了单个无人机从初始位置飞往最终位置的过程中,将计算任务卸载到沿途5个地面基站的场景.在满足无人机最大速度限制和地面基站计算能力有限的情况下,采用交替优化和逐次凸逼近技术联合优化无人机路径和卸载决策方案,使无人机的任务完成时间最小化.参考文献[26]构建了一种包括一个集中式顶部无人机和一群分布式底部无人机的场景,利用随机几何和排队理论,得到了闭环解的最优响应时延.从实验仿真结果可以看出,与不使用 MEC 的传统算法相比,采用这种方法时,无人机传输到控制中心的视频流服务数据包总数减少89.9%. ...
... 根据涉及的方法对面向无人机网络的边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[6][23][25] | 参考文献[24][26][27][28][29] |
| 智能方法 | 无 | 参考文献[30] |
从表2可以得出以下结论:第一,目前面向无人机网络的边缘计算大多采用非智能方法,结合智能方法进行边缘计算卸载的研究较少;第二,采用如Q-Learning的智能方法进行任务卸载的效果明显优于采用传统算法,智能方法相较于传统算法能够更好地适应复杂、动态的网络环境;第三,目前面向无人机网络的边缘计算研究只考虑降低无人机能耗和任务时延这两个方面,还没有与提高任务卸载量相关的工作.目前面向无人机网络的边缘智能计算研究中,很少有考虑卸载安全的,而在实际应用场景特别是军事战场环境中,无人机卸载过程中的信息安全尤为重要,因此如何保障数据的安全传输是一个值得深入研究的问题. ...
Computation offloading game for an UAV network in mobile edge computing
4
2017
... 根据优化目标对面向无人机网络的边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化无人机能耗 | [23][24] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化时延 | [6][25][26] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化效用 | [27][28][29][30] | 综合考虑无人机能耗和任务时延,根据不同任务的具体需求,赋予能耗和时延不同的权值,通过优化最小化能耗和时延的加权和,实现效用最大化 | 综合考虑能耗和时延影响的任务 |
3.1 最小化无人机能耗 为了在保障服务质量要求的条件下尽可能地延长无人机的续航时间,可采取最小化无人机能耗的卸载决策.无人机将计算量较大的任务卸载到地面基站,产生的能耗主要由无人机飞行或悬停产生的能耗、无人机本地计算产生的能耗和将任务卸载到地面基站产生的通信能耗3个部分构成.根据不同的场景,需要考虑对应的能耗表达式,并通过相应的优化方法来实现无人机能耗的最小化. ...
... 从博弈论角度出发,参考文献[27]根据纳什均衡提出了一种分布式算法,无人机群通过无线局域网将高强度计算任务卸载到基站,通过蜂窝网将高强度计算任务卸载到计算能力高于基站的边缘服务器上.同时构建一个能耗和时延的加权和的代价函数作为系统收益指标,通过优化卸载决策降低能量消耗,减少执行时延,从而获得最小化代价函数.对比实验结果可知,采用这种卸载决策的代价函数的值要低于仅在本地计算、仅卸载到基站和仅卸载到边缘服务器这3种方式.与参考文献[27]相似,参考文献[28]考虑了采用多架无人机直播足球比赛的场景,通过提出一个基于博弈论和纳什均衡的自适应任务卸载方案来实现最小化能耗和时延的加权和.当电池能量较为充足时,可以通过增加时延的权重来提升用户体验;而当电池容量不足时,可以通过增加能耗的权重来减少无人机的能耗.参考文献[29]使用匈牙利算法提出了最优的任务-无人机-移动边缘服务器匹配方法,最小化了能量消耗和处理时延的加权和,代价函数的权值可以根据用户对 QoS的不同要求灵活改变.模拟结果显示,提出的算法相较于基于距离的算法具有更好的性能.参考文献[30]提出了一种基于机器学习的边缘辅助无人机计算卸载方法,这种方法同时考虑了能量效率和任务处理时间,利用Q-Learning来解决无人机与任务集群的匹配和寻找最优的边缘服务器这两个问题.首先,无人机作为智能体(agent)学习最优策略,采取奖励函数最大化的动作将任务和无人机进行匹配;之后同样利用Q-Learning,无人机通过选择奖励函数最大的动作来找到最合适的边缘服务器,从而进行计算任务卸载.模拟仿真结果表明,基于机器学习的边缘辅助无人机计算卸载方法在能量效率和任务时延两方面均优于基于距离的贪婪算法. ...
... ]根据纳什均衡提出了一种分布式算法,无人机群通过无线局域网将高强度计算任务卸载到基站,通过蜂窝网将高强度计算任务卸载到计算能力高于基站的边缘服务器上.同时构建一个能耗和时延的加权和的代价函数作为系统收益指标,通过优化卸载决策降低能量消耗,减少执行时延,从而获得最小化代价函数.对比实验结果可知,采用这种卸载决策的代价函数的值要低于仅在本地计算、仅卸载到基站和仅卸载到边缘服务器这3种方式.与参考文献[27]相似,参考文献[28]考虑了采用多架无人机直播足球比赛的场景,通过提出一个基于博弈论和纳什均衡的自适应任务卸载方案来实现最小化能耗和时延的加权和.当电池能量较为充足时,可以通过增加时延的权重来提升用户体验;而当电池容量不足时,可以通过增加能耗的权重来减少无人机的能耗.参考文献[29]使用匈牙利算法提出了最优的任务-无人机-移动边缘服务器匹配方法,最小化了能量消耗和处理时延的加权和,代价函数的权值可以根据用户对 QoS的不同要求灵活改变.模拟结果显示,提出的算法相较于基于距离的算法具有更好的性能.参考文献[30]提出了一种基于机器学习的边缘辅助无人机计算卸载方法,这种方法同时考虑了能量效率和任务处理时间,利用Q-Learning来解决无人机与任务集群的匹配和寻找最优的边缘服务器这两个问题.首先,无人机作为智能体(agent)学习最优策略,采取奖励函数最大化的动作将任务和无人机进行匹配;之后同样利用Q-Learning,无人机通过选择奖励函数最大的动作来找到最合适的边缘服务器,从而进行计算任务卸载.模拟仿真结果表明,基于机器学习的边缘辅助无人机计算卸载方法在能量效率和任务时延两方面均优于基于距离的贪婪算法. ...
... 根据涉及的方法对面向无人机网络的边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[6][23][25] | 参考文献[24][26][27][28][29] |
| 智能方法 | 无 | 参考文献[30] |
从表2可以得出以下结论:第一,目前面向无人机网络的边缘计算大多采用非智能方法,结合智能方法进行边缘计算卸载的研究较少;第二,采用如Q-Learning的智能方法进行任务卸载的效果明显优于采用传统算法,智能方法相较于传统算法能够更好地适应复杂、动态的网络环境;第三,目前面向无人机网络的边缘计算研究只考虑降低无人机能耗和任务时延这两个方面,还没有与提高任务卸载量相关的工作.目前面向无人机网络的边缘智能计算研究中,很少有考虑卸载安全的,而在实际应用场景特别是军事战场环境中,无人机卸载过程中的信息安全尤为重要,因此如何保障数据的安全传输是一个值得深入研究的问题. ...
多无人机协同直播场景下自适应任务卸载决策研究
3
2019
... 根据优化目标对面向无人机网络的边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化无人机能耗 | [23][24] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化时延 | [6][25][26] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化效用 | [27][28][29][30] | 综合考虑无人机能耗和任务时延,根据不同任务的具体需求,赋予能耗和时延不同的权值,通过优化最小化能耗和时延的加权和,实现效用最大化 | 综合考虑能耗和时延影响的任务 |
3.1 最小化无人机能耗 为了在保障服务质量要求的条件下尽可能地延长无人机的续航时间,可采取最小化无人机能耗的卸载决策.无人机将计算量较大的任务卸载到地面基站,产生的能耗主要由无人机飞行或悬停产生的能耗、无人机本地计算产生的能耗和将任务卸载到地面基站产生的通信能耗3个部分构成.根据不同的场景,需要考虑对应的能耗表达式,并通过相应的优化方法来实现无人机能耗的最小化. ...
... 从博弈论角度出发,参考文献[27]根据纳什均衡提出了一种分布式算法,无人机群通过无线局域网将高强度计算任务卸载到基站,通过蜂窝网将高强度计算任务卸载到计算能力高于基站的边缘服务器上.同时构建一个能耗和时延的加权和的代价函数作为系统收益指标,通过优化卸载决策降低能量消耗,减少执行时延,从而获得最小化代价函数.对比实验结果可知,采用这种卸载决策的代价函数的值要低于仅在本地计算、仅卸载到基站和仅卸载到边缘服务器这3种方式.与参考文献[27]相似,参考文献[28]考虑了采用多架无人机直播足球比赛的场景,通过提出一个基于博弈论和纳什均衡的自适应任务卸载方案来实现最小化能耗和时延的加权和.当电池能量较为充足时,可以通过增加时延的权重来提升用户体验;而当电池容量不足时,可以通过增加能耗的权重来减少无人机的能耗.参考文献[29]使用匈牙利算法提出了最优的任务-无人机-移动边缘服务器匹配方法,最小化了能量消耗和处理时延的加权和,代价函数的权值可以根据用户对 QoS的不同要求灵活改变.模拟结果显示,提出的算法相较于基于距离的算法具有更好的性能.参考文献[30]提出了一种基于机器学习的边缘辅助无人机计算卸载方法,这种方法同时考虑了能量效率和任务处理时间,利用Q-Learning来解决无人机与任务集群的匹配和寻找最优的边缘服务器这两个问题.首先,无人机作为智能体(agent)学习最优策略,采取奖励函数最大化的动作将任务和无人机进行匹配;之后同样利用Q-Learning,无人机通过选择奖励函数最大的动作来找到最合适的边缘服务器,从而进行计算任务卸载.模拟仿真结果表明,基于机器学习的边缘辅助无人机计算卸载方法在能量效率和任务时延两方面均优于基于距离的贪婪算法. ...
... 根据涉及的方法对面向无人机网络的边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[6][23][25] | 参考文献[24][26][27][28][29] |
| 智能方法 | 无 | 参考文献[30] |
从表2可以得出以下结论:第一,目前面向无人机网络的边缘计算大多采用非智能方法,结合智能方法进行边缘计算卸载的研究较少;第二,采用如Q-Learning的智能方法进行任务卸载的效果明显优于采用传统算法,智能方法相较于传统算法能够更好地适应复杂、动态的网络环境;第三,目前面向无人机网络的边缘计算研究只考虑降低无人机能耗和任务时延这两个方面,还没有与提高任务卸载量相关的工作.目前面向无人机网络的边缘智能计算研究中,很少有考虑卸载安全的,而在实际应用场景特别是军事战场环境中,无人机卸载过程中的信息安全尤为重要,因此如何保障数据的安全传输是一个值得深入研究的问题. ...
多无人机协同直播场景下自适应任务卸载决策研究
3
2019
... 根据优化目标对面向无人机网络的边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化无人机能耗 | [23][24] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化时延 | [6][25][26] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化效用 | [27][28][29][30] | 综合考虑无人机能耗和任务时延,根据不同任务的具体需求,赋予能耗和时延不同的权值,通过优化最小化能耗和时延的加权和,实现效用最大化 | 综合考虑能耗和时延影响的任务 |
3.1 最小化无人机能耗 为了在保障服务质量要求的条件下尽可能地延长无人机的续航时间,可采取最小化无人机能耗的卸载决策.无人机将计算量较大的任务卸载到地面基站,产生的能耗主要由无人机飞行或悬停产生的能耗、无人机本地计算产生的能耗和将任务卸载到地面基站产生的通信能耗3个部分构成.根据不同的场景,需要考虑对应的能耗表达式,并通过相应的优化方法来实现无人机能耗的最小化. ...
... 从博弈论角度出发,参考文献[27]根据纳什均衡提出了一种分布式算法,无人机群通过无线局域网将高强度计算任务卸载到基站,通过蜂窝网将高强度计算任务卸载到计算能力高于基站的边缘服务器上.同时构建一个能耗和时延的加权和的代价函数作为系统收益指标,通过优化卸载决策降低能量消耗,减少执行时延,从而获得最小化代价函数.对比实验结果可知,采用这种卸载决策的代价函数的值要低于仅在本地计算、仅卸载到基站和仅卸载到边缘服务器这3种方式.与参考文献[27]相似,参考文献[28]考虑了采用多架无人机直播足球比赛的场景,通过提出一个基于博弈论和纳什均衡的自适应任务卸载方案来实现最小化能耗和时延的加权和.当电池能量较为充足时,可以通过增加时延的权重来提升用户体验;而当电池容量不足时,可以通过增加能耗的权重来减少无人机的能耗.参考文献[29]使用匈牙利算法提出了最优的任务-无人机-移动边缘服务器匹配方法,最小化了能量消耗和处理时延的加权和,代价函数的权值可以根据用户对 QoS的不同要求灵活改变.模拟结果显示,提出的算法相较于基于距离的算法具有更好的性能.参考文献[30]提出了一种基于机器学习的边缘辅助无人机计算卸载方法,这种方法同时考虑了能量效率和任务处理时间,利用Q-Learning来解决无人机与任务集群的匹配和寻找最优的边缘服务器这两个问题.首先,无人机作为智能体(agent)学习最优策略,采取奖励函数最大化的动作将任务和无人机进行匹配;之后同样利用Q-Learning,无人机通过选择奖励函数最大的动作来找到最合适的边缘服务器,从而进行计算任务卸载.模拟仿真结果表明,基于机器学习的边缘辅助无人机计算卸载方法在能量效率和任务时延两方面均优于基于距离的贪婪算法. ...
... 根据涉及的方法对面向无人机网络的边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[6][23][25] | 参考文献[24][26][27][28][29] |
| 智能方法 | 无 | 参考文献[30] |
从表2可以得出以下结论:第一,目前面向无人机网络的边缘计算大多采用非智能方法,结合智能方法进行边缘计算卸载的研究较少;第二,采用如Q-Learning的智能方法进行任务卸载的效果明显优于采用传统算法,智能方法相较于传统算法能够更好地适应复杂、动态的网络环境;第三,目前面向无人机网络的边缘计算研究只考虑降低无人机能耗和任务时延这两个方面,还没有与提高任务卸载量相关的工作.目前面向无人机网络的边缘智能计算研究中,很少有考虑卸载安全的,而在实际应用场景特别是军事战场环境中,无人机卸载过程中的信息安全尤为重要,因此如何保障数据的安全传输是一个值得深入研究的问题. ...
Optimal task-UAV-edge matching for computation offloading in UAV assisted mobile edge computing
3
2019
... 根据优化目标对面向无人机网络的边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化无人机能耗 | [23][24] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化时延 | [6][25][26] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化效用 | [27][28][29][30] | 综合考虑无人机能耗和任务时延,根据不同任务的具体需求,赋予能耗和时延不同的权值,通过优化最小化能耗和时延的加权和,实现效用最大化 | 综合考虑能耗和时延影响的任务 |
3.1 最小化无人机能耗 为了在保障服务质量要求的条件下尽可能地延长无人机的续航时间,可采取最小化无人机能耗的卸载决策.无人机将计算量较大的任务卸载到地面基站,产生的能耗主要由无人机飞行或悬停产生的能耗、无人机本地计算产生的能耗和将任务卸载到地面基站产生的通信能耗3个部分构成.根据不同的场景,需要考虑对应的能耗表达式,并通过相应的优化方法来实现无人机能耗的最小化. ...
... 从博弈论角度出发,参考文献[27]根据纳什均衡提出了一种分布式算法,无人机群通过无线局域网将高强度计算任务卸载到基站,通过蜂窝网将高强度计算任务卸载到计算能力高于基站的边缘服务器上.同时构建一个能耗和时延的加权和的代价函数作为系统收益指标,通过优化卸载决策降低能量消耗,减少执行时延,从而获得最小化代价函数.对比实验结果可知,采用这种卸载决策的代价函数的值要低于仅在本地计算、仅卸载到基站和仅卸载到边缘服务器这3种方式.与参考文献[27]相似,参考文献[28]考虑了采用多架无人机直播足球比赛的场景,通过提出一个基于博弈论和纳什均衡的自适应任务卸载方案来实现最小化能耗和时延的加权和.当电池能量较为充足时,可以通过增加时延的权重来提升用户体验;而当电池容量不足时,可以通过增加能耗的权重来减少无人机的能耗.参考文献[29]使用匈牙利算法提出了最优的任务-无人机-移动边缘服务器匹配方法,最小化了能量消耗和处理时延的加权和,代价函数的权值可以根据用户对 QoS的不同要求灵活改变.模拟结果显示,提出的算法相较于基于距离的算法具有更好的性能.参考文献[30]提出了一种基于机器学习的边缘辅助无人机计算卸载方法,这种方法同时考虑了能量效率和任务处理时间,利用Q-Learning来解决无人机与任务集群的匹配和寻找最优的边缘服务器这两个问题.首先,无人机作为智能体(agent)学习最优策略,采取奖励函数最大化的动作将任务和无人机进行匹配;之后同样利用Q-Learning,无人机通过选择奖励函数最大的动作来找到最合适的边缘服务器,从而进行计算任务卸载.模拟仿真结果表明,基于机器学习的边缘辅助无人机计算卸载方法在能量效率和任务时延两方面均优于基于距离的贪婪算法. ...
... 根据涉及的方法对面向无人机网络的边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[6][23][25] | 参考文献[24][26][27][28][29] |
| 智能方法 | 无 | 参考文献[30] |
从表2可以得出以下结论:第一,目前面向无人机网络的边缘计算大多采用非智能方法,结合智能方法进行边缘计算卸载的研究较少;第二,采用如Q-Learning的智能方法进行任务卸载的效果明显优于采用传统算法,智能方法相较于传统算法能够更好地适应复杂、动态的网络环境;第三,目前面向无人机网络的边缘计算研究只考虑降低无人机能耗和任务时延这两个方面,还没有与提高任务卸载量相关的工作.目前面向无人机网络的边缘智能计算研究中,很少有考虑卸载安全的,而在实际应用场景特别是军事战场环境中,无人机卸载过程中的信息安全尤为重要,因此如何保障数据的安全传输是一个值得深入研究的问题. ...
Machine learning based edge-assisted UAV computation offloading for data analyzing
3
2020
... 根据优化目标对面向无人机网络的边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化无人机能耗 | [23][24] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化时延 | [6][25][26] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化效用 | [27][28][29][30] | 综合考虑无人机能耗和任务时延,根据不同任务的具体需求,赋予能耗和时延不同的权值,通过优化最小化能耗和时延的加权和,实现效用最大化 | 综合考虑能耗和时延影响的任务 |
3.1 最小化无人机能耗 为了在保障服务质量要求的条件下尽可能地延长无人机的续航时间,可采取最小化无人机能耗的卸载决策.无人机将计算量较大的任务卸载到地面基站,产生的能耗主要由无人机飞行或悬停产生的能耗、无人机本地计算产生的能耗和将任务卸载到地面基站产生的通信能耗3个部分构成.根据不同的场景,需要考虑对应的能耗表达式,并通过相应的优化方法来实现无人机能耗的最小化. ...
... 从博弈论角度出发,参考文献[27]根据纳什均衡提出了一种分布式算法,无人机群通过无线局域网将高强度计算任务卸载到基站,通过蜂窝网将高强度计算任务卸载到计算能力高于基站的边缘服务器上.同时构建一个能耗和时延的加权和的代价函数作为系统收益指标,通过优化卸载决策降低能量消耗,减少执行时延,从而获得最小化代价函数.对比实验结果可知,采用这种卸载决策的代价函数的值要低于仅在本地计算、仅卸载到基站和仅卸载到边缘服务器这3种方式.与参考文献[27]相似,参考文献[28]考虑了采用多架无人机直播足球比赛的场景,通过提出一个基于博弈论和纳什均衡的自适应任务卸载方案来实现最小化能耗和时延的加权和.当电池能量较为充足时,可以通过增加时延的权重来提升用户体验;而当电池容量不足时,可以通过增加能耗的权重来减少无人机的能耗.参考文献[29]使用匈牙利算法提出了最优的任务-无人机-移动边缘服务器匹配方法,最小化了能量消耗和处理时延的加权和,代价函数的权值可以根据用户对 QoS的不同要求灵活改变.模拟结果显示,提出的算法相较于基于距离的算法具有更好的性能.参考文献[30]提出了一种基于机器学习的边缘辅助无人机计算卸载方法,这种方法同时考虑了能量效率和任务处理时间,利用Q-Learning来解决无人机与任务集群的匹配和寻找最优的边缘服务器这两个问题.首先,无人机作为智能体(agent)学习最优策略,采取奖励函数最大化的动作将任务和无人机进行匹配;之后同样利用Q-Learning,无人机通过选择奖励函数最大的动作来找到最合适的边缘服务器,从而进行计算任务卸载.模拟仿真结果表明,基于机器学习的边缘辅助无人机计算卸载方法在能量效率和任务时延两方面均优于基于距离的贪婪算法. ...
... 根据涉及的方法对面向无人机网络的边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[6][23][25] | 参考文献[24][26][27][28][29] |
| 智能方法 | 无 | 参考文献[30] |
从表2可以得出以下结论:第一,目前面向无人机网络的边缘计算大多采用非智能方法,结合智能方法进行边缘计算卸载的研究较少;第二,采用如Q-Learning的智能方法进行任务卸载的效果明显优于采用传统算法,智能方法相较于传统算法能够更好地适应复杂、动态的网络环境;第三,目前面向无人机网络的边缘计算研究只考虑降低无人机能耗和任务时延这两个方面,还没有与提高任务卸载量相关的工作.目前面向无人机网络的边缘智能计算研究中,很少有考虑卸载安全的,而在实际应用场景特别是军事战场环境中,无人机卸载过程中的信息安全尤为重要,因此如何保障数据的安全传输是一个值得深入研究的问题. ...
Mobile edge computing via a UAV-mounted cloudlet:optimization of bit allocation and path planning
4
2018
... 参考文献[31]研究了一种基于无人机的边缘移动计算架构,即一架配备有“微云”的无人机为多个地面用户设备提供计算卸载服务.通过逐次凸逼近的方法联合优化无人机飞行路径和比特分配,解决地面用户设备能量消耗最小化问题.实验仿真结果表明,相较于只优化无人机飞行路径和只优化比特分配,所提出的比特分配和无人机路径联合优化方法具有更加显著的节能效果.与参考文献[31]的场景相似,参考文献[32]提出了一种基于块坐标下降和逐次凸逼近的联合优化算法,通过联合优化卸载过程中的比特分配和无人机飞行路径,最小化所有地面用户设备完成任务的总能耗.实验结果显示,相比于卸载所有地面用户设备的方案,提出的最优卸载方案的能耗平均可以降低12%,大大低于只在本地计算的方案的能耗,而且随着用户数量的增加,能耗降低的效果更加明显.参考文献[33]提出联合优化任务数据、计算资源和飞行路径(jointly optimize task data and computing resource allocations and trajectory,JTDCATO)算法,最小化地面移动终端的最大能耗,但由于算法复杂度较大,在此基础上通过简化无人机路径提出了固定点服务(fixed point service,FPS)算法.仿真实验结果表明,与仅优化路径、仅优化数据分配、路径与数据分配均不优化的基准算法相比,JTDCATO 算法可以获得最好的性能,FPS算法可以获得次优性能,但是FPS算法的复杂度大大低于JTDCATO算法,可以根据实际需要在两种方案中进行选择. ...
... ]研究了一种基于无人机的边缘移动计算架构,即一架配备有“微云”的无人机为多个地面用户设备提供计算卸载服务.通过逐次凸逼近的方法联合优化无人机飞行路径和比特分配,解决地面用户设备能量消耗最小化问题.实验仿真结果表明,相较于只优化无人机飞行路径和只优化比特分配,所提出的比特分配和无人机路径联合优化方法具有更加显著的节能效果.与参考文献[31]的场景相似,参考文献[32]提出了一种基于块坐标下降和逐次凸逼近的联合优化算法,通过联合优化卸载过程中的比特分配和无人机飞行路径,最小化所有地面用户设备完成任务的总能耗.实验结果显示,相比于卸载所有地面用户设备的方案,提出的最优卸载方案的能耗平均可以降低12%,大大低于只在本地计算的方案的能耗,而且随着用户数量的增加,能耗降低的效果更加明显.参考文献[33]提出联合优化任务数据、计算资源和飞行路径(jointly optimize task data and computing resource allocations and trajectory,JTDCATO)算法,最小化地面移动终端的最大能耗,但由于算法复杂度较大,在此基础上通过简化无人机路径提出了固定点服务(fixed point service,FPS)算法.仿真实验结果表明,与仅优化路径、仅优化数据分配、路径与数据分配均不优化的基准算法相比,JTDCATO 算法可以获得最好的性能,FPS算法可以获得次优性能,但是FPS算法的复杂度大大低于JTDCATO算法,可以根据实际需要在两种方案中进行选择. ...
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
UAV-enhanced intelligent offloading for internet of things at the edge
3
2020
... 参考文献[31]研究了一种基于无人机的边缘移动计算架构,即一架配备有“微云”的无人机为多个地面用户设备提供计算卸载服务.通过逐次凸逼近的方法联合优化无人机飞行路径和比特分配,解决地面用户设备能量消耗最小化问题.实验仿真结果表明,相较于只优化无人机飞行路径和只优化比特分配,所提出的比特分配和无人机路径联合优化方法具有更加显著的节能效果.与参考文献[31]的场景相似,参考文献[32]提出了一种基于块坐标下降和逐次凸逼近的联合优化算法,通过联合优化卸载过程中的比特分配和无人机飞行路径,最小化所有地面用户设备完成任务的总能耗.实验结果显示,相比于卸载所有地面用户设备的方案,提出的最优卸载方案的能耗平均可以降低12%,大大低于只在本地计算的方案的能耗,而且随着用户数量的增加,能耗降低的效果更加明显.参考文献[33]提出联合优化任务数据、计算资源和飞行路径(jointly optimize task data and computing resource allocations and trajectory,JTDCATO)算法,最小化地面移动终端的最大能耗,但由于算法复杂度较大,在此基础上通过简化无人机路径提出了固定点服务(fixed point service,FPS)算法.仿真实验结果表明,与仅优化路径、仅优化数据分配、路径与数据分配均不优化的基准算法相比,JTDCATO 算法可以获得最好的性能,FPS算法可以获得次优性能,但是FPS算法的复杂度大大低于JTDCATO算法,可以根据实际需要在两种方案中进行选择. ...
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Joint trajectory design,task data,and computing resource allocations for NOMA-based and UAV-assisted mobile edge computing
3
2019
... 参考文献[31]研究了一种基于无人机的边缘移动计算架构,即一架配备有“微云”的无人机为多个地面用户设备提供计算卸载服务.通过逐次凸逼近的方法联合优化无人机飞行路径和比特分配,解决地面用户设备能量消耗最小化问题.实验仿真结果表明,相较于只优化无人机飞行路径和只优化比特分配,所提出的比特分配和无人机路径联合优化方法具有更加显著的节能效果.与参考文献[31]的场景相似,参考文献[32]提出了一种基于块坐标下降和逐次凸逼近的联合优化算法,通过联合优化卸载过程中的比特分配和无人机飞行路径,最小化所有地面用户设备完成任务的总能耗.实验结果显示,相比于卸载所有地面用户设备的方案,提出的最优卸载方案的能耗平均可以降低12%,大大低于只在本地计算的方案的能耗,而且随着用户数量的增加,能耗降低的效果更加明显.参考文献[33]提出联合优化任务数据、计算资源和飞行路径(jointly optimize task data and computing resource allocations and trajectory,JTDCATO)算法,最小化地面移动终端的最大能耗,但由于算法复杂度较大,在此基础上通过简化无人机路径提出了固定点服务(fixed point service,FPS)算法.仿真实验结果表明,与仅优化路径、仅优化数据分配、路径与数据分配均不优化的基准算法相比,JTDCATO 算法可以获得最好的性能,FPS算法可以获得次优性能,但是FPS算法的复杂度大大低于JTDCATO算法,可以根据实际需要在两种方案中进行选择. ...
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Fair data allocation and trajectory optimization for UAV-assisted mobile edge computing
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Task offloading in UAV-aided edge computing:bit allocation and trajectory optimization
4
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... ]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
UAV-aided mobile edge computing systems with one by one access scheme
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Joint optimization of UAV position,time slot allocation,and computation task partition in multiuser aerial mobile-edge computing systems
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Optimal Resource Partitioning and Bit Allocation for UAV-enabled mobile edge computing
3
2018
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
RL-based user association and resource allocation for multi-UAV enabled MEC
5
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 与上面提到的文献不同,参考文献[9]和参考文献[39]考虑了多无人机边缘计算场景,结合智能方法,多架无人机协同为地面用户提供计算卸载服务.参考文献[9]首先提出了基于凸优化的路径控制算法(convex optimization based trajectory control algorithm,CAT),将CAT算法分解成无人机路径优化和用户关联与资源分配两个子问题,通过交替优化迭代最终实现最小化所有用户设备的总能耗.面对动态环境需要实时决策的要求,参考文献[8]又提出了基于深度强化学习的轨迹控制算法(deep reinforcement learning based trajectory control algorithm, RAT),将所有用户设备的总能耗的相反数作为RAT算法的奖励,无人机通过选择合适的飞行方向和距离来获取最佳的奖励.此外,参考文献[9]还提出一种低复杂度的匹配算法来确定用户关联与资源分配.与 CAT 算法需要迭代且易受初始位置影响不同,RAT算法因为在训练阶段会随机产生大量初始位置用于训练神经网络,所以其能够在训练完成后适应任何初始起飞位置,且能非常快速地获得解决方案.对比结果显示,RAT算法能够达到与CAT算法相当的性能,与传统算法相比,能够相当大程度地降低用户设备总能耗.参考文献[39]研究了一个多架无人机作为移动边缘计算平台为多个地面用户设备提供计算卸载服务的系统.为最小化所有用户设备总能耗,参考文献[39]提出了一种基于强化学习的用户关联与资源分配算法,以当前时刻有哪些设备将任务卸载到哪些无人机为当前状态,以用户设备能耗的相反数为奖励,用户设备根据当前状态做出本地计算或将任务卸载到某个无人机的动作来获取最大的奖励,最终实现所有用户设备总能耗最小化.仿真实验结果表明,所提出的方案与穷举法方案具有相同的性能,两者都能实现最小的能量消耗,优于随机卸载方案和只选择最近无人机卸载的贪婪卸载方案,大大优于仅在本地计算的方案. ...
... ]还提出一种低复杂度的匹配算法来确定用户关联与资源分配.与 CAT 算法需要迭代且易受初始位置影响不同,RAT算法因为在训练阶段会随机产生大量初始位置用于训练神经网络,所以其能够在训练完成后适应任何初始起飞位置,且能非常快速地获得解决方案.对比结果显示,RAT算法能够达到与CAT算法相当的性能,与传统算法相比,能够相当大程度地降低用户设备总能耗.参考文献[39]研究了一个多架无人机作为移动边缘计算平台为多个地面用户设备提供计算卸载服务的系统.为最小化所有用户设备总能耗,参考文献[39]提出了一种基于强化学习的用户关联与资源分配算法,以当前时刻有哪些设备将任务卸载到哪些无人机为当前状态,以用户设备能耗的相反数为奖励,用户设备根据当前状态做出本地计算或将任务卸载到某个无人机的动作来获取最大的奖励,最终实现所有用户设备总能耗最小化.仿真实验结果表明,所提出的方案与穷举法方案具有相同的性能,两者都能实现最小的能量消耗,优于随机卸载方案和只选择最近无人机卸载的贪婪卸载方案,大大优于仅在本地计算的方案. ...
... ]研究了一个多架无人机作为移动边缘计算平台为多个地面用户设备提供计算卸载服务的系统.为最小化所有用户设备总能耗,参考文献[39]提出了一种基于强化学习的用户关联与资源分配算法,以当前时刻有哪些设备将任务卸载到哪些无人机为当前状态,以用户设备能耗的相反数为奖励,用户设备根据当前状态做出本地计算或将任务卸载到某个无人机的动作来获取最大的奖励,最终实现所有用户设备总能耗最小化.仿真实验结果表明,所提出的方案与穷举法方案具有相同的性能,两者都能实现最小的能量消耗,优于随机卸载方案和只选择最近无人机卸载的贪婪卸载方案,大大优于仅在本地计算的方案. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
UAV-enabled mobile edge computing:offloading optimization and trajectory design
3
2018
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[40]在无人机无线能量传输的架构上研究了一种基于无人机的移动边缘计算系统.在该系统中,无人机在为地面用户设备提供计算卸载服务的同时,采用无线能量传输技术为用户设备供电.通过联合优化卸载计算比特数、用户与无人机计算频率和无人机飞行路径,提出了一种最小化功耗的方案.采用逐次凸逼近技术得到的结果表明,相较于从初始点到终点飞直线和飞半圆的基准方案,提出的方案具有更好的性能.参考文献[42]提出的无人机辅助边缘-云服务器系统通过联合优化无人机路径和资源分配,实现无人机能耗最小化,并利用逐次凸优化(successive convex optimization, SCO)和拉格朗日二向性技术来解决这个联合优化问题.参考文献[42]根据无人机位置优化和长短期记忆(long short-term memory,LSTM)网络设计了一种3 层卸载结构的能效优化方案,物联网设备的任务可在本地计算,也可以卸载到计算能力较强但能源有限的无人机上计算,或者通过无人机中继进一步卸载到计算能力更强的边缘服务器上.由于传统的数学模型不能对动态变化的网络资源进行分析和预测,因此结合智能化方法提出一种基于LSTM网络的任务预测算法来提前制定卸载决策,以及一种无人机位置优化算法,并在这两种算法的基础上设计了一种能耗优化算法来最小化无人机的能耗.根据搭建的仿真实验平台得出的结果可知,与其他算法相比,提出的算法在不同数据量和时延要求条件下均能有效降低无人机的能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Joint trajectory-resource optimization in UAV-enabled edge-cloud system with virtualized mobile clone
2
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Energy efficient for UAV-enabled mobile edge computing networks:intelligent task prediction and offloading
4
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[40]在无人机无线能量传输的架构上研究了一种基于无人机的移动边缘计算系统.在该系统中,无人机在为地面用户设备提供计算卸载服务的同时,采用无线能量传输技术为用户设备供电.通过联合优化卸载计算比特数、用户与无人机计算频率和无人机飞行路径,提出了一种最小化功耗的方案.采用逐次凸逼近技术得到的结果表明,相较于从初始点到终点飞直线和飞半圆的基准方案,提出的方案具有更好的性能.参考文献[42]提出的无人机辅助边缘-云服务器系统通过联合优化无人机路径和资源分配,实现无人机能耗最小化,并利用逐次凸优化(successive convex optimization, SCO)和拉格朗日二向性技术来解决这个联合优化问题.参考文献[42]根据无人机位置优化和长短期记忆(long short-term memory,LSTM)网络设计了一种3 层卸载结构的能效优化方案,物联网设备的任务可在本地计算,也可以卸载到计算能力较强但能源有限的无人机上计算,或者通过无人机中继进一步卸载到计算能力更强的边缘服务器上.由于传统的数学模型不能对动态变化的网络资源进行分析和预测,因此结合智能化方法提出一种基于LSTM网络的任务预测算法来提前制定卸载决策,以及一种无人机位置优化算法,并在这两种算法的基础上设计了一种能耗优化算法来最小化无人机的能耗.根据搭建的仿真实验平台得出的结果可知,与其他算法相比,提出的算法在不同数据量和时延要求条件下均能有效降低无人机的能耗. ...
... ]提出的无人机辅助边缘-云服务器系统通过联合优化无人机路径和资源分配,实现无人机能耗最小化,并利用逐次凸优化(successive convex optimization, SCO)和拉格朗日二向性技术来解决这个联合优化问题.参考文献[42]根据无人机位置优化和长短期记忆(long short-term memory,LSTM)网络设计了一种3 层卸载结构的能效优化方案,物联网设备的任务可在本地计算,也可以卸载到计算能力较强但能源有限的无人机上计算,或者通过无人机中继进一步卸载到计算能力更强的边缘服务器上.由于传统的数学模型不能对动态变化的网络资源进行分析和预测,因此结合智能化方法提出一种基于LSTM网络的任务预测算法来提前制定卸载决策,以及一种无人机位置优化算法,并在这两种算法的基础上设计了一种能耗优化算法来最小化无人机的能耗.根据搭建的仿真实验平台得出的结果可知,与其他算法相比,提出的算法在不同数据量和时延要求条件下均能有效降低无人机的能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
UAV-assisted multi-access edge computing system:an energy-efficient resource management framework
3
2020
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[43]将最小化物联网设备和无人机的加权能耗和作为无人机辅助移动边缘计算系统的优化目标,将问题分解成卸载决策、带宽分配、物联网设备计算资源分配和无人机计算资源分配4个子问题,利用交替优化的方法进行迭代,直至收敛.模拟实验的结果显示,提出的方案优于平均共享资源方案和仅在本地计算的方案,当设备数量增加时,方案之间的性能差距会随之增大.参考文献[44]采用基于李雅普诺夫的方法,将设备和无人机的加权能耗最小化问题分解成3个子问题来交替优化:利用交替方向乘子法(alternating direction method of multipliers,ADMM)优化计算卸载和本地计算资源;用内点法优化无人机计算资源;用凸优化工具优化无人机路径.参考文献[45]介绍了多个物联网设备将计算任务卸载到无人机或直接卸载到周围地面基站的场景,在满足任务时延约束的条件下,通过联合优化计算卸载、带宽分配、比特分配和无人机路径来最小化物联网设备和无人机的加权能耗和.从仿真结果来看,提出的协同计算卸载方案的加权总能耗和低于采用半带宽、平均比特分配、无人机飞圆形路径的基准方案.参考文献[46]提出了一种多无人机支持的 MEC 系统,将无人机部署问题作为上层优化问题,将任务调度问题作为底层优化问题,通过联合优化实现系统总能耗最小化的目标,实验结果的各种性能指标验证了双层优化和所提系统的有效性. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Stochastic computation offloading and trajectory scheduling for UAV-assisted mobile edge computing
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[43]将最小化物联网设备和无人机的加权能耗和作为无人机辅助移动边缘计算系统的优化目标,将问题分解成卸载决策、带宽分配、物联网设备计算资源分配和无人机计算资源分配4个子问题,利用交替优化的方法进行迭代,直至收敛.模拟实验的结果显示,提出的方案优于平均共享资源方案和仅在本地计算的方案,当设备数量增加时,方案之间的性能差距会随之增大.参考文献[44]采用基于李雅普诺夫的方法,将设备和无人机的加权能耗最小化问题分解成3个子问题来交替优化:利用交替方向乘子法(alternating direction method of multipliers,ADMM)优化计算卸载和本地计算资源;用内点法优化无人机计算资源;用凸优化工具优化无人机路径.参考文献[45]介绍了多个物联网设备将计算任务卸载到无人机或直接卸载到周围地面基站的场景,在满足任务时延约束的条件下,通过联合优化计算卸载、带宽分配、比特分配和无人机路径来最小化物联网设备和无人机的加权能耗和.从仿真结果来看,提出的协同计算卸载方案的加权总能耗和低于采用半带宽、平均比特分配、无人机飞圆形路径的基准方案.参考文献[46]提出了一种多无人机支持的 MEC 系统,将无人机部署问题作为上层优化问题,将任务调度问题作为底层优化问题,通过联合优化实现系统总能耗最小化的目标,实验结果的各种性能指标验证了双层优化和所提系统的有效性. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Collaborative computation offloading at UAV-enhanced edge
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[43]将最小化物联网设备和无人机的加权能耗和作为无人机辅助移动边缘计算系统的优化目标,将问题分解成卸载决策、带宽分配、物联网设备计算资源分配和无人机计算资源分配4个子问题,利用交替优化的方法进行迭代,直至收敛.模拟实验的结果显示,提出的方案优于平均共享资源方案和仅在本地计算的方案,当设备数量增加时,方案之间的性能差距会随之增大.参考文献[44]采用基于李雅普诺夫的方法,将设备和无人机的加权能耗最小化问题分解成3个子问题来交替优化:利用交替方向乘子法(alternating direction method of multipliers,ADMM)优化计算卸载和本地计算资源;用内点法优化无人机计算资源;用凸优化工具优化无人机路径.参考文献[45]介绍了多个物联网设备将计算任务卸载到无人机或直接卸载到周围地面基站的场景,在满足任务时延约束的条件下,通过联合优化计算卸载、带宽分配、比特分配和无人机路径来最小化物联网设备和无人机的加权能耗和.从仿真结果来看,提出的协同计算卸载方案的加权总能耗和低于采用半带宽、平均比特分配、无人机飞圆形路径的基准方案.参考文献[46]提出了一种多无人机支持的 MEC 系统,将无人机部署问题作为上层优化问题,将任务调度问题作为底层优化问题,通过联合优化实现系统总能耗最小化的目标,实验结果的各种性能指标验证了双层优化和所提系统的有效性. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Joint deployment and task scheduling optimization for large-scale mobile users in multi-UAV-enabled mobile edge computing
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[43]将最小化物联网设备和无人机的加权能耗和作为无人机辅助移动边缘计算系统的优化目标,将问题分解成卸载决策、带宽分配、物联网设备计算资源分配和无人机计算资源分配4个子问题,利用交替优化的方法进行迭代,直至收敛.模拟实验的结果显示,提出的方案优于平均共享资源方案和仅在本地计算的方案,当设备数量增加时,方案之间的性能差距会随之增大.参考文献[44]采用基于李雅普诺夫的方法,将设备和无人机的加权能耗最小化问题分解成3个子问题来交替优化:利用交替方向乘子法(alternating direction method of multipliers,ADMM)优化计算卸载和本地计算资源;用内点法优化无人机计算资源;用凸优化工具优化无人机路径.参考文献[45]介绍了多个物联网设备将计算任务卸载到无人机或直接卸载到周围地面基站的场景,在满足任务时延约束的条件下,通过联合优化计算卸载、带宽分配、比特分配和无人机路径来最小化物联网设备和无人机的加权能耗和.从仿真结果来看,提出的协同计算卸载方案的加权总能耗和低于采用半带宽、平均比特分配、无人机飞圆形路径的基准方案.参考文献[46]提出了一种多无人机支持的 MEC 系统,将无人机部署问题作为上层优化问题,将任务调度问题作为底层优化问题,通过联合优化实现系统总能耗最小化的目标,实验结果的各种性能指标验证了双层优化和所提系统的有效性. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
UAV-assisted relaying and edge computing:scheduling and trajectory optimization
4
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[47]、参考文献[48]和参考文献[49]均考虑了一种 3 层架构的无人机辅助移动边缘计算系统,每个终端设备上的任务可以在本地计算,也可将部分卸载到无人机上或通过无人机中继卸载到接入点(access point,AP)上.参考文献[47]利用拉格朗日对偶法优化计算资源和带宽分配,利用逐次凸逼近技术优化无人机路径,解决设备和无人机的加权能耗最小化问题.参考文献[48]将设备和无人机总能耗最小化问题分解成任务分配优化、带宽分配优化和无人机路径设计3个子问题,并对这3个子问题进行交替优化迭代,以最小化设备和无人机的总能耗.参考文献[49]在终端和无人机的最大CPU频率和最大传输功率的约束下,通过优化比特分配、时隙调度、功率分配和无人机路径来最小化设备和无人机加权能耗和.参考文献[50]考虑了由多架无人机组成的移动边缘计算网络,通过联合优化用户关联、功率控制、计算能力分配和位置规划,提出了具有时延和覆盖约束的总功率最小化问题,将这个问题分解成几个子问题后通过交替优化迭代来最小化用户设备和无人机的加权总能耗.仿真结果表明,提出的方法优于固定高度、带宽方案与平均计算能力方案,接近全局最优解.参考文献[51]构建了一个多无人机 MEC 网络,在给定计算任务和计算期限的前提下,考虑无线电和计算资源的联合优化以及无人机路径规划问题,使无人机和地面设备的加权总能耗最小,通过逐次凸逼近的方法对两个子问题进行交替迭代,最终得到原问题的最优解.参考文献[52]提出了一种由一个云服务器、多个边缘服务器无人机和多个终端无人机组成的节能边缘-云架构,以最小化系统的加权总能耗为目标,提出了一种分散计算卸载机制. ...
... ]均考虑了一种 3 层架构的无人机辅助移动边缘计算系统,每个终端设备上的任务可以在本地计算,也可将部分卸载到无人机上或通过无人机中继卸载到接入点(access point,AP)上.参考文献[47]利用拉格朗日对偶法优化计算资源和带宽分配,利用逐次凸逼近技术优化无人机路径,解决设备和无人机的加权能耗最小化问题.参考文献[48]将设备和无人机总能耗最小化问题分解成任务分配优化、带宽分配优化和无人机路径设计3个子问题,并对这3个子问题进行交替优化迭代,以最小化设备和无人机的总能耗.参考文献[49]在终端和无人机的最大CPU频率和最大传输功率的约束下,通过优化比特分配、时隙调度、功率分配和无人机路径来最小化设备和无人机加权能耗和.参考文献[50]考虑了由多架无人机组成的移动边缘计算网络,通过联合优化用户关联、功率控制、计算能力分配和位置规划,提出了具有时延和覆盖约束的总功率最小化问题,将这个问题分解成几个子问题后通过交替优化迭代来最小化用户设备和无人机的加权总能耗.仿真结果表明,提出的方法优于固定高度、带宽方案与平均计算能力方案,接近全局最优解.参考文献[51]构建了一个多无人机 MEC 网络,在给定计算任务和计算期限的前提下,考虑无线电和计算资源的联合优化以及无人机路径规划问题,使无人机和地面设备的加权总能耗最小,通过逐次凸逼近的方法对两个子问题进行交替迭代,最终得到原问题的最优解.参考文献[52]提出了一种由一个云服务器、多个边缘服务器无人机和多个终端无人机组成的节能边缘-云架构,以最小化系统的加权总能耗为目标,提出了一种分散计算卸载机制. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Task and bandwidth allocation for UAV-assisted mobile edge computing with trajectory design
4
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[47]、参考文献[48]和参考文献[49]均考虑了一种 3 层架构的无人机辅助移动边缘计算系统,每个终端设备上的任务可以在本地计算,也可将部分卸载到无人机上或通过无人机中继卸载到接入点(access point,AP)上.参考文献[47]利用拉格朗日对偶法优化计算资源和带宽分配,利用逐次凸逼近技术优化无人机路径,解决设备和无人机的加权能耗最小化问题.参考文献[48]将设备和无人机总能耗最小化问题分解成任务分配优化、带宽分配优化和无人机路径设计3个子问题,并对这3个子问题进行交替优化迭代,以最小化设备和无人机的总能耗.参考文献[49]在终端和无人机的最大CPU频率和最大传输功率的约束下,通过优化比特分配、时隙调度、功率分配和无人机路径来最小化设备和无人机加权能耗和.参考文献[50]考虑了由多架无人机组成的移动边缘计算网络,通过联合优化用户关联、功率控制、计算能力分配和位置规划,提出了具有时延和覆盖约束的总功率最小化问题,将这个问题分解成几个子问题后通过交替优化迭代来最小化用户设备和无人机的加权总能耗.仿真结果表明,提出的方法优于固定高度、带宽方案与平均计算能力方案,接近全局最优解.参考文献[51]构建了一个多无人机 MEC 网络,在给定计算任务和计算期限的前提下,考虑无线电和计算资源的联合优化以及无人机路径规划问题,使无人机和地面设备的加权总能耗最小,通过逐次凸逼近的方法对两个子问题进行交替迭代,最终得到原问题的最优解.参考文献[52]提出了一种由一个云服务器、多个边缘服务器无人机和多个终端无人机组成的节能边缘-云架构,以最小化系统的加权总能耗为目标,提出了一种分散计算卸载机制. ...
... ]利用拉格朗日对偶法优化计算资源和带宽分配,利用逐次凸逼近技术优化无人机路径,解决设备和无人机的加权能耗最小化问题.参考文献[48]将设备和无人机总能耗最小化问题分解成任务分配优化、带宽分配优化和无人机路径设计3个子问题,并对这3个子问题进行交替优化迭代,以最小化设备和无人机的总能耗.参考文献[49]在终端和无人机的最大CPU频率和最大传输功率的约束下,通过优化比特分配、时隙调度、功率分配和无人机路径来最小化设备和无人机加权能耗和.参考文献[50]考虑了由多架无人机组成的移动边缘计算网络,通过联合优化用户关联、功率控制、计算能力分配和位置规划,提出了具有时延和覆盖约束的总功率最小化问题,将这个问题分解成几个子问题后通过交替优化迭代来最小化用户设备和无人机的加权总能耗.仿真结果表明,提出的方法优于固定高度、带宽方案与平均计算能力方案,接近全局最优解.参考文献[51]构建了一个多无人机 MEC 网络,在给定计算任务和计算期限的前提下,考虑无线电和计算资源的联合优化以及无人机路径规划问题,使无人机和地面设备的加权总能耗最小,通过逐次凸逼近的方法对两个子问题进行交替迭代,最终得到原问题的最优解.参考文献[52]提出了一种由一个云服务器、多个边缘服务器无人机和多个终端无人机组成的节能边缘-云架构,以最小化系统的加权总能耗为目标,提出了一种分散计算卸载机制. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Joint computation and communication design for UAV-assisted mobile edge computing in IoT
4
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[47]、参考文献[48]和参考文献[49]均考虑了一种 3 层架构的无人机辅助移动边缘计算系统,每个终端设备上的任务可以在本地计算,也可将部分卸载到无人机上或通过无人机中继卸载到接入点(access point,AP)上.参考文献[47]利用拉格朗日对偶法优化计算资源和带宽分配,利用逐次凸逼近技术优化无人机路径,解决设备和无人机的加权能耗最小化问题.参考文献[48]将设备和无人机总能耗最小化问题分解成任务分配优化、带宽分配优化和无人机路径设计3个子问题,并对这3个子问题进行交替优化迭代,以最小化设备和无人机的总能耗.参考文献[49]在终端和无人机的最大CPU频率和最大传输功率的约束下,通过优化比特分配、时隙调度、功率分配和无人机路径来最小化设备和无人机加权能耗和.参考文献[50]考虑了由多架无人机组成的移动边缘计算网络,通过联合优化用户关联、功率控制、计算能力分配和位置规划,提出了具有时延和覆盖约束的总功率最小化问题,将这个问题分解成几个子问题后通过交替优化迭代来最小化用户设备和无人机的加权总能耗.仿真结果表明,提出的方法优于固定高度、带宽方案与平均计算能力方案,接近全局最优解.参考文献[51]构建了一个多无人机 MEC 网络,在给定计算任务和计算期限的前提下,考虑无线电和计算资源的联合优化以及无人机路径规划问题,使无人机和地面设备的加权总能耗最小,通过逐次凸逼近的方法对两个子问题进行交替迭代,最终得到原问题的最优解.参考文献[52]提出了一种由一个云服务器、多个边缘服务器无人机和多个终端无人机组成的节能边缘-云架构,以最小化系统的加权总能耗为目标,提出了一种分散计算卸载机制. ...
... ]将设备和无人机总能耗最小化问题分解成任务分配优化、带宽分配优化和无人机路径设计3个子问题,并对这3个子问题进行交替优化迭代,以最小化设备和无人机的总能耗.参考文献[49]在终端和无人机的最大CPU频率和最大传输功率的约束下,通过优化比特分配、时隙调度、功率分配和无人机路径来最小化设备和无人机加权能耗和.参考文献[50]考虑了由多架无人机组成的移动边缘计算网络,通过联合优化用户关联、功率控制、计算能力分配和位置规划,提出了具有时延和覆盖约束的总功率最小化问题,将这个问题分解成几个子问题后通过交替优化迭代来最小化用户设备和无人机的加权总能耗.仿真结果表明,提出的方法优于固定高度、带宽方案与平均计算能力方案,接近全局最优解.参考文献[51]构建了一个多无人机 MEC 网络,在给定计算任务和计算期限的前提下,考虑无线电和计算资源的联合优化以及无人机路径规划问题,使无人机和地面设备的加权总能耗最小,通过逐次凸逼近的方法对两个子问题进行交替迭代,最终得到原问题的最优解.参考文献[52]提出了一种由一个云服务器、多个边缘服务器无人机和多个终端无人机组成的节能边缘-云架构,以最小化系统的加权总能耗为目标,提出了一种分散计算卸载机制. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Energy efficient resource allocation in UAV-enabled mobile edge computing networks
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[47]、参考文献[48]和参考文献[49]均考虑了一种 3 层架构的无人机辅助移动边缘计算系统,每个终端设备上的任务可以在本地计算,也可将部分卸载到无人机上或通过无人机中继卸载到接入点(access point,AP)上.参考文献[47]利用拉格朗日对偶法优化计算资源和带宽分配,利用逐次凸逼近技术优化无人机路径,解决设备和无人机的加权能耗最小化问题.参考文献[48]将设备和无人机总能耗最小化问题分解成任务分配优化、带宽分配优化和无人机路径设计3个子问题,并对这3个子问题进行交替优化迭代,以最小化设备和无人机的总能耗.参考文献[49]在终端和无人机的最大CPU频率和最大传输功率的约束下,通过优化比特分配、时隙调度、功率分配和无人机路径来最小化设备和无人机加权能耗和.参考文献[50]考虑了由多架无人机组成的移动边缘计算网络,通过联合优化用户关联、功率控制、计算能力分配和位置规划,提出了具有时延和覆盖约束的总功率最小化问题,将这个问题分解成几个子问题后通过交替优化迭代来最小化用户设备和无人机的加权总能耗.仿真结果表明,提出的方法优于固定高度、带宽方案与平均计算能力方案,接近全局最优解.参考文献[51]构建了一个多无人机 MEC 网络,在给定计算任务和计算期限的前提下,考虑无线电和计算资源的联合优化以及无人机路径规划问题,使无人机和地面设备的加权总能耗最小,通过逐次凸逼近的方法对两个子问题进行交替迭代,最终得到原问题的最优解.参考文献[52]提出了一种由一个云服务器、多个边缘服务器无人机和多个终端无人机组成的节能边缘-云架构,以最小化系统的加权总能耗为目标,提出了一种分散计算卸载机制. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Energy-efficient multi-UAV-enabled multi-access edge computing incorporating NOMA
3
2020
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[47]、参考文献[48]和参考文献[49]均考虑了一种 3 层架构的无人机辅助移动边缘计算系统,每个终端设备上的任务可以在本地计算,也可将部分卸载到无人机上或通过无人机中继卸载到接入点(access point,AP)上.参考文献[47]利用拉格朗日对偶法优化计算资源和带宽分配,利用逐次凸逼近技术优化无人机路径,解决设备和无人机的加权能耗最小化问题.参考文献[48]将设备和无人机总能耗最小化问题分解成任务分配优化、带宽分配优化和无人机路径设计3个子问题,并对这3个子问题进行交替优化迭代,以最小化设备和无人机的总能耗.参考文献[49]在终端和无人机的最大CPU频率和最大传输功率的约束下,通过优化比特分配、时隙调度、功率分配和无人机路径来最小化设备和无人机加权能耗和.参考文献[50]考虑了由多架无人机组成的移动边缘计算网络,通过联合优化用户关联、功率控制、计算能力分配和位置规划,提出了具有时延和覆盖约束的总功率最小化问题,将这个问题分解成几个子问题后通过交替优化迭代来最小化用户设备和无人机的加权总能耗.仿真结果表明,提出的方法优于固定高度、带宽方案与平均计算能力方案,接近全局最优解.参考文献[51]构建了一个多无人机 MEC 网络,在给定计算任务和计算期限的前提下,考虑无线电和计算资源的联合优化以及无人机路径规划问题,使无人机和地面设备的加权总能耗最小,通过逐次凸逼近的方法对两个子问题进行交替迭代,最终得到原问题的最优解.参考文献[52]提出了一种由一个云服务器、多个边缘服务器无人机和多个终端无人机组成的节能边缘-云架构,以最小化系统的加权总能耗为目标,提出了一种分散计算卸载机制. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
RESERVE:an energy-efficient edge cloud architecture for intelligent multi-UAV
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[47]、参考文献[48]和参考文献[49]均考虑了一种 3 层架构的无人机辅助移动边缘计算系统,每个终端设备上的任务可以在本地计算,也可将部分卸载到无人机上或通过无人机中继卸载到接入点(access point,AP)上.参考文献[47]利用拉格朗日对偶法优化计算资源和带宽分配,利用逐次凸逼近技术优化无人机路径,解决设备和无人机的加权能耗最小化问题.参考文献[48]将设备和无人机总能耗最小化问题分解成任务分配优化、带宽分配优化和无人机路径设计3个子问题,并对这3个子问题进行交替优化迭代,以最小化设备和无人机的总能耗.参考文献[49]在终端和无人机的最大CPU频率和最大传输功率的约束下,通过优化比特分配、时隙调度、功率分配和无人机路径来最小化设备和无人机加权能耗和.参考文献[50]考虑了由多架无人机组成的移动边缘计算网络,通过联合优化用户关联、功率控制、计算能力分配和位置规划,提出了具有时延和覆盖约束的总功率最小化问题,将这个问题分解成几个子问题后通过交替优化迭代来最小化用户设备和无人机的加权总能耗.仿真结果表明,提出的方法优于固定高度、带宽方案与平均计算能力方案,接近全局最优解.参考文献[51]构建了一个多无人机 MEC 网络,在给定计算任务和计算期限的前提下,考虑无线电和计算资源的联合优化以及无人机路径规划问题,使无人机和地面设备的加权总能耗最小,通过逐次凸逼近的方法对两个子问题进行交替迭代,最终得到原问题的最优解.参考文献[52]提出了一种由一个云服务器、多个边缘服务器无人机和多个终端无人机组成的节能边缘-云架构,以最小化系统的加权总能耗为目标,提出了一种分散计算卸载机制. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Joint offloading and trajectory design for UAV-enabled mobile edge computing systems
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[53]研究了一个无人机辅助边缘计算系统,目标是通过联合优化用户调度、任务卸载比例和无人机飞行路径,使每个时隙内的所有用户的最大时延之和最小.为了解决这个带有耦合约束和离散二元变量的混合整数非凸问题,提出了一种基于惩罚对偶分解的算法,将等式约束作为增广拉格朗日项对目标函数进行二元化.最后还拓展了不同的目标函数,使所有用户在一个周期(包含多个时隙)内的平均时延最小.模拟实验结果显示,基于惩罚对偶分解的方案的时延低于无人机固定和飞圆形路径等方案的时延,虽然前者不及优化平均时延的方案,但每个用户对应的时延抖动较小,在保证时效性的同时也保证了公平性.参考文献[54]提出了基于毫米波回程的无人机辅助低时延移动边缘计算网络,在这个网络中用户设备可以通过无人机中继或地面用户自组网将任务卸载到基站,通过网络资源分配和无人机路径设计来最小化两种卸载方式的加权时延和.采用广义Benders分解作为外环算法来分离整数变量和连续变量,采用联合交替方向乘子法、Dinkelbach算法和逐次凸逼近作为内环算法来解决这个非凸混合整数非线性规划问题,仿真结果表明,该网络和算法具有良好的性能. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
UAV-aided low latency mobile edge computing with mmWave backhaul
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[53]研究了一个无人机辅助边缘计算系统,目标是通过联合优化用户调度、任务卸载比例和无人机飞行路径,使每个时隙内的所有用户的最大时延之和最小.为了解决这个带有耦合约束和离散二元变量的混合整数非凸问题,提出了一种基于惩罚对偶分解的算法,将等式约束作为增广拉格朗日项对目标函数进行二元化.最后还拓展了不同的目标函数,使所有用户在一个周期(包含多个时隙)内的平均时延最小.模拟实验结果显示,基于惩罚对偶分解的方案的时延低于无人机固定和飞圆形路径等方案的时延,虽然前者不及优化平均时延的方案,但每个用户对应的时延抖动较小,在保证时效性的同时也保证了公平性.参考文献[54]提出了基于毫米波回程的无人机辅助低时延移动边缘计算网络,在这个网络中用户设备可以通过无人机中继或地面用户自组网将任务卸载到基站,通过网络资源分配和无人机路径设计来最小化两种卸载方式的加权时延和.采用广义Benders分解作为外环算法来分离整数变量和连续变量,采用联合交替方向乘子法、Dinkelbach算法和逐次凸逼近作为内环算法来解决这个非凸混合整数非线性规划问题,仿真结果表明,该网络和算法具有良好的性能. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Incentive UAV-enabled mobile edge computing based on microwave power transmission
3
2020
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[55]提出了一种基于微波功率传输的无人机移动边缘计算系统,无人机先悬停在微波电站上方进行无线充电,然后飞到用户区域上方提供计算卸载服务.考虑到以利润为中心的 MEC 服务提供商,无人机根据卸载任务量乘以每兆比特单价向用户收取计算服务费用,通过联合优化卸载决策、卸载持续时间和无人机飞行路径来最大化无人机服务效益.参考文献[56]通过联合优化用户关联、无人机路径、用户上传功率提出了最大化用户总卸载量问题,并将该问题分解成3个子问题,采用分支定界算法优化用户关联问题,采用逐次凸优化解决无人机路径和用户上传功率两个子问题,最后对这3个子问题进行交替优化迭代.仿真结果表明,相较于只优化第一个子问题的方案和只优化前两个子问题的方案,提出的算法的总卸载量分别提高了37.3%和16.8%.参考文献[57]中研究了一个无线移动边缘计算系统,AP 为无人机无线充电,无人机向用户设备传输部分从AP收获的能量,并为用户设备提供计算卸载服务或将任务进一步卸载到AP 进行计算.通过联合优化任务分配、无人机能量传输功率和无人机路径,最大化所有用户完成任务的加权和.参考文献[58]提出了无人机辅助社交车联网(social Internet of vehicles,SioV)的3层架构,包括物理世界层、边缘计算层和社交网络层.在物理世界层通过车与车和车与基础设施形成网络,将流行的内容缓存在路边单元;在边缘计算层,无人机为车辆提供计算卸载服务;在社交网络层,根据社会关系和兴趣相似性构建车辆的社交关系.利用动态规格法优化车辆传输功率,在固定传输功率条件下采用路径搜索算法优化无人机路径,从而最大化无人机为车辆处理计算任务的数据量和从路边单元给车辆传输缓存内容的数据量之和. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
User association and path planning for UAV-aided mobile edge computing with energy restriction
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[55]提出了一种基于微波功率传输的无人机移动边缘计算系统,无人机先悬停在微波电站上方进行无线充电,然后飞到用户区域上方提供计算卸载服务.考虑到以利润为中心的 MEC 服务提供商,无人机根据卸载任务量乘以每兆比特单价向用户收取计算服务费用,通过联合优化卸载决策、卸载持续时间和无人机飞行路径来最大化无人机服务效益.参考文献[56]通过联合优化用户关联、无人机路径、用户上传功率提出了最大化用户总卸载量问题,并将该问题分解成3个子问题,采用分支定界算法优化用户关联问题,采用逐次凸优化解决无人机路径和用户上传功率两个子问题,最后对这3个子问题进行交替优化迭代.仿真结果表明,相较于只优化第一个子问题的方案和只优化前两个子问题的方案,提出的算法的总卸载量分别提高了37.3%和16.8%.参考文献[57]中研究了一个无线移动边缘计算系统,AP 为无人机无线充电,无人机向用户设备传输部分从AP收获的能量,并为用户设备提供计算卸载服务或将任务进一步卸载到AP 进行计算.通过联合优化任务分配、无人机能量传输功率和无人机路径,最大化所有用户完成任务的加权和.参考文献[58]提出了无人机辅助社交车联网(social Internet of vehicles,SioV)的3层架构,包括物理世界层、边缘计算层和社交网络层.在物理世界层通过车与车和车与基础设施形成网络,将流行的内容缓存在路边单元;在边缘计算层,无人机为车辆提供计算卸载服务;在社交网络层,根据社会关系和兴趣相似性构建车辆的社交关系.利用动态规格法优化车辆传输功率,在固定传输功率条件下采用路径搜索算法优化无人机路径,从而最大化无人机为车辆处理计算任务的数据量和从路边单元给车辆传输缓存内容的数据量之和. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Wireless-powered mobile edge computing with cooperated UAV
4
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[55]提出了一种基于微波功率传输的无人机移动边缘计算系统,无人机先悬停在微波电站上方进行无线充电,然后飞到用户区域上方提供计算卸载服务.考虑到以利润为中心的 MEC 服务提供商,无人机根据卸载任务量乘以每兆比特单价向用户收取计算服务费用,通过联合优化卸载决策、卸载持续时间和无人机飞行路径来最大化无人机服务效益.参考文献[56]通过联合优化用户关联、无人机路径、用户上传功率提出了最大化用户总卸载量问题,并将该问题分解成3个子问题,采用分支定界算法优化用户关联问题,采用逐次凸优化解决无人机路径和用户上传功率两个子问题,最后对这3个子问题进行交替优化迭代.仿真结果表明,相较于只优化第一个子问题的方案和只优化前两个子问题的方案,提出的算法的总卸载量分别提高了37.3%和16.8%.参考文献[57]中研究了一个无线移动边缘计算系统,AP 为无人机无线充电,无人机向用户设备传输部分从AP收获的能量,并为用户设备提供计算卸载服务或将任务进一步卸载到AP 进行计算.通过联合优化任务分配、无人机能量传输功率和无人机路径,最大化所有用户完成任务的加权和.参考文献[58]提出了无人机辅助社交车联网(social Internet of vehicles,SioV)的3层架构,包括物理世界层、边缘计算层和社交网络层.在物理世界层通过车与车和车与基础设施形成网络,将流行的内容缓存在路边单元;在边缘计算层,无人机为车辆提供计算卸载服务;在社交网络层,根据社会关系和兴趣相似性构建车辆的社交关系.利用动态规格法优化车辆传输功率,在固定传输功率条件下采用路径搜索算法优化无人机路径,从而最大化无人机为车辆处理计算任务的数据量和从路边单元给车辆传输缓存内容的数据量之和. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
... (3)无线充电供能的无人机边缘智能计算:无人机能耗问题是部署基于无人机的边缘智能计算的最大挑战,考虑到无人机十分有限的电池容量,目前已有在基站上安装无线能量传输模块为无人机进行无线充电的相关研究[57].而在实际应用场景中,由于基站通常与无人机相距较远,导致能量传输效率大幅降低,因此如何保障无线充电供能的无人机边缘智能计算场景中的能量传输效率是一个值得研究的热点问题. ...
Energy-aware dynamic resource allocation in UAV assisted mobile edge computing over social internet of vehicles
3
2018
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[55]提出了一种基于微波功率传输的无人机移动边缘计算系统,无人机先悬停在微波电站上方进行无线充电,然后飞到用户区域上方提供计算卸载服务.考虑到以利润为中心的 MEC 服务提供商,无人机根据卸载任务量乘以每兆比特单价向用户收取计算服务费用,通过联合优化卸载决策、卸载持续时间和无人机飞行路径来最大化无人机服务效益.参考文献[56]通过联合优化用户关联、无人机路径、用户上传功率提出了最大化用户总卸载量问题,并将该问题分解成3个子问题,采用分支定界算法优化用户关联问题,采用逐次凸优化解决无人机路径和用户上传功率两个子问题,最后对这3个子问题进行交替优化迭代.仿真结果表明,相较于只优化第一个子问题的方案和只优化前两个子问题的方案,提出的算法的总卸载量分别提高了37.3%和16.8%.参考文献[57]中研究了一个无线移动边缘计算系统,AP 为无人机无线充电,无人机向用户设备传输部分从AP收获的能量,并为用户设备提供计算卸载服务或将任务进一步卸载到AP 进行计算.通过联合优化任务分配、无人机能量传输功率和无人机路径,最大化所有用户完成任务的加权和.参考文献[58]提出了无人机辅助社交车联网(social Internet of vehicles,SioV)的3层架构,包括物理世界层、边缘计算层和社交网络层.在物理世界层通过车与车和车与基础设施形成网络,将流行的内容缓存在路边单元;在边缘计算层,无人机为车辆提供计算卸载服务;在社交网络层,根据社会关系和兴趣相似性构建车辆的社交关系.利用动态规格法优化车辆传输功率,在固定传输功率条件下采用路径搜索算法优化无人机路径,从而最大化无人机为车辆处理计算任务的数据量和从路边单元给车辆传输缓存内容的数据量之和. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Computation rate maximization in UAV-enabled wireless-powered mobile-edge computing systems
3
2018
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[59]研究了基于无人机的 MEC 无线供电系统在部分卸载和二进制卸载两种模式下的计算量最大化问题,通过联合优化用户传输功率、CPU频率、卸载次数和无人机路径来最大化总计算量,结果显示,部分卸载模式的性能优于二进制卸载模式.参考文献[60]介绍了一个无人机在为多个地面用户提供卸载服务的同时,存在多个监听无人机的场景,通过联合优化无人机的位置、用户发射功率、无人机干扰功率、卸载比、无人机计算能力、卸载用户关联来最大化最小安全传输速率.参考文献[61]通过对用户卸载调度和无人机路径这两个子问题进行交替优化来最大化所有用户的卸载速率和.参考文献[62]将最大化用户卸载吞吐量问题表示为一个半马尔可夫决策过程(semi-markov decision process,SMDP),运用深度强化学习方法求解最大化平均回报,以获得最大化用户任务的平均吞吐量.由仿真结果可知:提出的深度强化学习方法能在收敛前有效地引导无人机获得更多的奖励,得到的平均回报大于 Q-Learning 方法,即相较于Q-Learning方法,所提方法拥有更大的任务平均吞吐量.参考文献[63]针对多架配备边缘服务器的无人机为多个热点区域提供计算卸载服务的场景,提出了一种在线移动边缘服务器调度方案,通过考虑用户移动性和任务的非均匀分布,不断地优化无人机位置,从而更好地提供卸载服务. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Secure Communications for UAV-enabled mobile edge computing systems
3
2020
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[59]研究了基于无人机的 MEC 无线供电系统在部分卸载和二进制卸载两种模式下的计算量最大化问题,通过联合优化用户传输功率、CPU频率、卸载次数和无人机路径来最大化总计算量,结果显示,部分卸载模式的性能优于二进制卸载模式.参考文献[60]介绍了一个无人机在为多个地面用户提供卸载服务的同时,存在多个监听无人机的场景,通过联合优化无人机的位置、用户发射功率、无人机干扰功率、卸载比、无人机计算能力、卸载用户关联来最大化最小安全传输速率.参考文献[61]通过对用户卸载调度和无人机路径这两个子问题进行交替优化来最大化所有用户的卸载速率和.参考文献[62]将最大化用户卸载吞吐量问题表示为一个半马尔可夫决策过程(semi-markov decision process,SMDP),运用深度强化学习方法求解最大化平均回报,以获得最大化用户任务的平均吞吐量.由仿真结果可知:提出的深度强化学习方法能在收敛前有效地引导无人机获得更多的奖励,得到的平均回报大于 Q-Learning 方法,即相较于Q-Learning方法,所提方法拥有更大的任务平均吞吐量.参考文献[63]针对多架配备边缘服务器的无人机为多个热点区域提供计算卸载服务的场景,提出了一种在线移动边缘服务器调度方案,通过考虑用户移动性和任务的非均匀分布,不断地优化无人机位置,从而更好地提供卸载服务. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
UAV trajectory optimization for data offloading at the edge of multiple cells
3
2018
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[59]研究了基于无人机的 MEC 无线供电系统在部分卸载和二进制卸载两种模式下的计算量最大化问题,通过联合优化用户传输功率、CPU频率、卸载次数和无人机路径来最大化总计算量,结果显示,部分卸载模式的性能优于二进制卸载模式.参考文献[60]介绍了一个无人机在为多个地面用户提供卸载服务的同时,存在多个监听无人机的场景,通过联合优化无人机的位置、用户发射功率、无人机干扰功率、卸载比、无人机计算能力、卸载用户关联来最大化最小安全传输速率.参考文献[61]通过对用户卸载调度和无人机路径这两个子问题进行交替优化来最大化所有用户的卸载速率和.参考文献[62]将最大化用户卸载吞吐量问题表示为一个半马尔可夫决策过程(semi-markov decision process,SMDP),运用深度强化学习方法求解最大化平均回报,以获得最大化用户任务的平均吞吐量.由仿真结果可知:提出的深度强化学习方法能在收敛前有效地引导无人机获得更多的奖励,得到的平均回报大于 Q-Learning 方法,即相较于Q-Learning方法,所提方法拥有更大的任务平均吞吐量.参考文献[63]针对多架配备边缘服务器的无人机为多个热点区域提供计算卸载服务的场景,提出了一种在线移动边缘服务器调度方案,通过考虑用户移动性和任务的非均匀分布,不断地优化无人机位置,从而更好地提供卸载服务. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Task Offloading for UAV-based mobile edge computing via deep reinforcement learning
3
2018
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[59]研究了基于无人机的 MEC 无线供电系统在部分卸载和二进制卸载两种模式下的计算量最大化问题,通过联合优化用户传输功率、CPU频率、卸载次数和无人机路径来最大化总计算量,结果显示,部分卸载模式的性能优于二进制卸载模式.参考文献[60]介绍了一个无人机在为多个地面用户提供卸载服务的同时,存在多个监听无人机的场景,通过联合优化无人机的位置、用户发射功率、无人机干扰功率、卸载比、无人机计算能力、卸载用户关联来最大化最小安全传输速率.参考文献[61]通过对用户卸载调度和无人机路径这两个子问题进行交替优化来最大化所有用户的卸载速率和.参考文献[62]将最大化用户卸载吞吐量问题表示为一个半马尔可夫决策过程(semi-markov decision process,SMDP),运用深度强化学习方法求解最大化平均回报,以获得最大化用户任务的平均吞吐量.由仿真结果可知:提出的深度强化学习方法能在收敛前有效地引导无人机获得更多的奖励,得到的平均回报大于 Q-Learning 方法,即相较于Q-Learning方法,所提方法拥有更大的任务平均吞吐量.参考文献[63]针对多架配备边缘服务器的无人机为多个热点区域提供计算卸载服务的场景,提出了一种在线移动边缘服务器调度方案,通过考虑用户移动性和任务的非均匀分布,不断地优化无人机位置,从而更好地提供卸载服务. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Online UAV-mounted edge server dispatching for mobile-to-mobile edge computing
3
2020
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[59]研究了基于无人机的 MEC 无线供电系统在部分卸载和二进制卸载两种模式下的计算量最大化问题,通过联合优化用户传输功率、CPU频率、卸载次数和无人机路径来最大化总计算量,结果显示,部分卸载模式的性能优于二进制卸载模式.参考文献[60]介绍了一个无人机在为多个地面用户提供卸载服务的同时,存在多个监听无人机的场景,通过联合优化无人机的位置、用户发射功率、无人机干扰功率、卸载比、无人机计算能力、卸载用户关联来最大化最小安全传输速率.参考文献[61]通过对用户卸载调度和无人机路径这两个子问题进行交替优化来最大化所有用户的卸载速率和.参考文献[62]将最大化用户卸载吞吐量问题表示为一个半马尔可夫决策过程(semi-markov decision process,SMDP),运用深度强化学习方法求解最大化平均回报,以获得最大化用户任务的平均吞吐量.由仿真结果可知:提出的深度强化学习方法能在收敛前有效地引导无人机获得更多的奖励,得到的平均回报大于 Q-Learning 方法,即相较于Q-Learning方法,所提方法拥有更大的任务平均吞吐量.参考文献[63]针对多架配备边缘服务器的无人机为多个热点区域提供计算卸载服务的场景,提出了一种在线移动边缘服务器调度方案,通过考虑用户移动性和任务的非均匀分布,不断地优化无人机位置,从而更好地提供卸载服务. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Joint task offloading and resource allocation in UAV-enabled mobile edge computing
3
2020
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[64]考虑了一个无人机和多个边缘云服务器共同为物联网设备提供计算卸载服务的场景,通过联合优化无人机位置、通信和计算资源分配以及任务拆分决策,最小化所有物联网设备时延和无人机能耗的加权和.参考文献[65]提出了基于智能体的任务卸载体系架构,利用智能体强大的感知能力,协同无人机和边缘服务器上的计算资源为用户提供最优的任务卸载决策,使系统模型的任务时延和能量消耗最小.实验结果表明,在卸载计算任务时引入智能体,可以显著降低时延和能量消耗.参考文献[66]结合智能方法研究了终端用户不断移动的场景的无人机路径动态规划问题,将优化问题表示成马尔可夫决策过程,利用双重深度Q网络(double deep Q-network,DDQN)最大化长期系统奖励(关于吞吐量和能耗的函数).无人机根据当前时刻的自身位置、终端用户的位置、信道状态和剩余能量等环境信息做出相应动作来获得最大的奖励,为终端用户提供更好的动态服务.参考文献[67]研究了一个基于无人机的 MEC 系统的计算效率(任务量/能耗)最大化问题,通过联合优化卸载时间、CPU频率、用户发射功率和无人机路径的方案得到的计算效率高于其他基准方案.参考文献[68]通过对无人机的用户关联、计算和通信资源分配以及路径调度进行联合优化,研究了多无人机辅助MEC网络中的计算效率最大化问题,并针对这一问题提出了一种双环结构的迭代优化算法. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Agent-enabled task offloading in UAV-aided mobile edge computing
3
2020
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[64]考虑了一个无人机和多个边缘云服务器共同为物联网设备提供计算卸载服务的场景,通过联合优化无人机位置、通信和计算资源分配以及任务拆分决策,最小化所有物联网设备时延和无人机能耗的加权和.参考文献[65]提出了基于智能体的任务卸载体系架构,利用智能体强大的感知能力,协同无人机和边缘服务器上的计算资源为用户提供最优的任务卸载决策,使系统模型的任务时延和能量消耗最小.实验结果表明,在卸载计算任务时引入智能体,可以显著降低时延和能量消耗.参考文献[66]结合智能方法研究了终端用户不断移动的场景的无人机路径动态规划问题,将优化问题表示成马尔可夫决策过程,利用双重深度Q网络(double deep Q-network,DDQN)最大化长期系统奖励(关于吞吐量和能耗的函数).无人机根据当前时刻的自身位置、终端用户的位置、信道状态和剩余能量等环境信息做出相应动作来获得最大的奖励,为终端用户提供更好的动态服务.参考文献[67]研究了一个基于无人机的 MEC 系统的计算效率(任务量/能耗)最大化问题,通过联合优化卸载时间、CPU频率、用户发射功率和无人机路径的方案得到的计算效率高于其他基准方案.参考文献[68]通过对无人机的用户关联、计算和通信资源分配以及路径调度进行联合优化,研究了多无人机辅助MEC网络中的计算效率最大化问题,并针对这一问题提出了一种双环结构的迭代优化算法. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Path planning for UAV-mounted mobile edge computing with deep reinforcement learning
3
2020
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[64]考虑了一个无人机和多个边缘云服务器共同为物联网设备提供计算卸载服务的场景,通过联合优化无人机位置、通信和计算资源分配以及任务拆分决策,最小化所有物联网设备时延和无人机能耗的加权和.参考文献[65]提出了基于智能体的任务卸载体系架构,利用智能体强大的感知能力,协同无人机和边缘服务器上的计算资源为用户提供最优的任务卸载决策,使系统模型的任务时延和能量消耗最小.实验结果表明,在卸载计算任务时引入智能体,可以显著降低时延和能量消耗.参考文献[66]结合智能方法研究了终端用户不断移动的场景的无人机路径动态规划问题,将优化问题表示成马尔可夫决策过程,利用双重深度Q网络(double deep Q-network,DDQN)最大化长期系统奖励(关于吞吐量和能耗的函数).无人机根据当前时刻的自身位置、终端用户的位置、信道状态和剩余能量等环境信息做出相应动作来获得最大的奖励,为终端用户提供更好的动态服务.参考文献[67]研究了一个基于无人机的 MEC 系统的计算效率(任务量/能耗)最大化问题,通过联合优化卸载时间、CPU频率、用户发射功率和无人机路径的方案得到的计算效率高于其他基准方案.参考文献[68]通过对无人机的用户关联、计算和通信资源分配以及路径调度进行联合优化,研究了多无人机辅助MEC网络中的计算效率最大化问题,并针对这一问题提出了一种双环结构的迭代优化算法. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Resource allocation for a UAV-enabled mobile-edge computing system:computation efficiency maximization
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[64]考虑了一个无人机和多个边缘云服务器共同为物联网设备提供计算卸载服务的场景,通过联合优化无人机位置、通信和计算资源分配以及任务拆分决策,最小化所有物联网设备时延和无人机能耗的加权和.参考文献[65]提出了基于智能体的任务卸载体系架构,利用智能体强大的感知能力,协同无人机和边缘服务器上的计算资源为用户提供最优的任务卸载决策,使系统模型的任务时延和能量消耗最小.实验结果表明,在卸载计算任务时引入智能体,可以显著降低时延和能量消耗.参考文献[66]结合智能方法研究了终端用户不断移动的场景的无人机路径动态规划问题,将优化问题表示成马尔可夫决策过程,利用双重深度Q网络(double deep Q-network,DDQN)最大化长期系统奖励(关于吞吐量和能耗的函数).无人机根据当前时刻的自身位置、终端用户的位置、信道状态和剩余能量等环境信息做出相应动作来获得最大的奖励,为终端用户提供更好的动态服务.参考文献[67]研究了一个基于无人机的 MEC 系统的计算效率(任务量/能耗)最大化问题,通过联合优化卸载时间、CPU频率、用户发射功率和无人机路径的方案得到的计算效率高于其他基准方案.参考文献[68]通过对无人机的用户关联、计算和通信资源分配以及路径调度进行联合优化,研究了多无人机辅助MEC网络中的计算效率最大化问题,并针对这一问题提出了一种双环结构的迭代优化算法. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Computation-efficient offloading and trajectory scheduling for multi-UAV assisted mobile edge computing
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[64]考虑了一个无人机和多个边缘云服务器共同为物联网设备提供计算卸载服务的场景,通过联合优化无人机位置、通信和计算资源分配以及任务拆分决策,最小化所有物联网设备时延和无人机能耗的加权和.参考文献[65]提出了基于智能体的任务卸载体系架构,利用智能体强大的感知能力,协同无人机和边缘服务器上的计算资源为用户提供最优的任务卸载决策,使系统模型的任务时延和能量消耗最小.实验结果表明,在卸载计算任务时引入智能体,可以显著降低时延和能量消耗.参考文献[66]结合智能方法研究了终端用户不断移动的场景的无人机路径动态规划问题,将优化问题表示成马尔可夫决策过程,利用双重深度Q网络(double deep Q-network,DDQN)最大化长期系统奖励(关于吞吐量和能耗的函数).无人机根据当前时刻的自身位置、终端用户的位置、信道状态和剩余能量等环境信息做出相应动作来获得最大的奖励,为终端用户提供更好的动态服务.参考文献[67]研究了一个基于无人机的 MEC 系统的计算效率(任务量/能耗)最大化问题,通过联合优化卸载时间、CPU频率、用户发射功率和无人机路径的方案得到的计算效率高于其他基准方案.参考文献[68]通过对无人机的用户关联、计算和通信资源分配以及路径调度进行联合优化,研究了多无人机辅助MEC网络中的计算效率最大化问题,并针对这一问题提出了一种双环结构的迭代优化算法. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Joint computation offloading and routing optimization for UAV-edge-cloud computing environments
3
2018
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[69]研究了无人机-边缘-云计算模型中的联合计算卸载和路由优化问题,针对这个问题提出了一种基于马尔可夫近似技术的高效算法,仿真结果表明,与最短路径算法相比,提出的算法具有更好的性能.参考文献[70]研究了两个高空无人机为多个低空无人机提供卸载服务的双层无人机MEC网络的任务卸载问题,提出了一种基于多领袖多跟随者Stackelberg博弈的动态分配算法.仿真结果显示:相对于单领袖的方案,采用该算法后,高空无人机能获得更高的计算收益,低空无人机拥有更低的卸载时延.参考文献[71]提出了一种基于MEC技术的3层在线数据处理网络:底层的分布式传感器在工作环境中生成原始数据信息,无人机收集传感器的原始数据并对其进行预处理,紧接着无人机将预处理结果传输到中心云服务器进行进一步分析.此外,参考文献[71]还提出了一种基于深度强化学习的无人机路径规划算法,将无人机的局部观察作为神经网络的输入,预测候选动作的奖励(收集的数据量),选取最大的奖励作为最优策略;同时提出了一种基于李雅普诺夫优化的在线联合资源管理算法,在保证高效的数据收集的同时降低能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Minimization of offloading delay for two-tier UAV with mobile edge computing
3
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[69]研究了无人机-边缘-云计算模型中的联合计算卸载和路由优化问题,针对这个问题提出了一种基于马尔可夫近似技术的高效算法,仿真结果表明,与最短路径算法相比,提出的算法具有更好的性能.参考文献[70]研究了两个高空无人机为多个低空无人机提供卸载服务的双层无人机MEC网络的任务卸载问题,提出了一种基于多领袖多跟随者Stackelberg博弈的动态分配算法.仿真结果显示:相对于单领袖的方案,采用该算法后,高空无人机能获得更高的计算收益,低空无人机拥有更低的卸载时延.参考文献[71]提出了一种基于MEC技术的3层在线数据处理网络:底层的分布式传感器在工作环境中生成原始数据信息,无人机收集传感器的原始数据并对其进行预处理,紧接着无人机将预处理结果传输到中心云服务器进行进一步分析.此外,参考文献[71]还提出了一种基于深度强化学习的无人机路径规划算法,将无人机的局部观察作为神经网络的输入,预测候选动作的奖励(收集的数据量),选取最大的奖励作为最优策略;同时提出了一种基于李雅普诺夫优化的在线联合资源管理算法,在保证高效的数据收集的同时降低能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...
Towards big data processing in IoT--path planning and resource management of UAV base stations in mobile-edge computing system
4
2019
... 根据优化目标对面向地面网络的无人机边缘智能计算研究进行分类
| 优化目标 | 参考文献序号 | 特点 | 适用对象 |
| 最小化用户设备能耗 | [9][31][32][33][34][35][36][37][38][39] | 在满足时延条件的约束下,最小化用户设备的能耗 | 能量消耗型任务 |
| 最小化无人机能耗 | [40][41][42] | 在满足时延条件的约束下,最小化无人机的能耗 | 能量消耗型任务 |
| 最小化用户设备和无人机加权总能耗 | [43][44][45][46][47][48][49][50][51][52] | 在满足时延条件的约束下,最小化用户设备和无人机的加权总能耗 | 能量消耗型任务 |
| 最小化时延 | [53][54] | 最小化完成协同计算任务过程中产生的时延 | 时延敏感型任务 |
| 最大化任务量 | [55][56][57][58][59][60][61][62][63] | 最大化所有用户的任务卸载量或任务处理量(包括卸载量和本地计算量) | 任务密集型任务 |
| 最大化效用 | [64][65][66][67][68][69][70][71] | 综合考虑无人机或设备的能耗、任务量和时延等各方面的因素,根据不同任务的具体需求制定不同的效用表达式,通过优化实现收益最大化 | 综合考虑能耗、任务量和时延等影响的任务 |
参考文献[34]研究了公平感知数据分配和飞行路径的无人机辅助移动边缘计算系统,通过联合优化任务数据分配和无人机飞行路径来最小化所有地面移动终端的最大能耗,体现了所有地面终端之间的公平性.参考文献[35]介绍了以最小化所有物联网移动设备的总能耗为目标的无人机辅助边缘计算场景,这里需要联合优化卸载决策、比特分配和无人机飞行路径.该参考文献利用一种交替优化迭代算法,在保持其他两个变量不变的情况下,分别对卸载决策、比特分配和无人机飞行路径交替优化,实现所有设备总能耗最小化.与参考文献[35]相似,参考文献[36]和参考文献[37]也考虑了无人机作为边缘服务器为多个地面终端设备提供计算卸载服务的场景,通过将全局优化问题分解成两个子问题进行交替优化来最小化移动终端总能耗.参考文献[38]提出了一种基于对偶分解的资源分配方案和比特分配策略,提出的方案虽然复杂度较低,但与只在本地计算的基准方案相比,可以大大降低移动终端设备的能耗. ...
... 参考文献[69]研究了无人机-边缘-云计算模型中的联合计算卸载和路由优化问题,针对这个问题提出了一种基于马尔可夫近似技术的高效算法,仿真结果表明,与最短路径算法相比,提出的算法具有更好的性能.参考文献[70]研究了两个高空无人机为多个低空无人机提供卸载服务的双层无人机MEC网络的任务卸载问题,提出了一种基于多领袖多跟随者Stackelberg博弈的动态分配算法.仿真结果显示:相对于单领袖的方案,采用该算法后,高空无人机能获得更高的计算收益,低空无人机拥有更低的卸载时延.参考文献[71]提出了一种基于MEC技术的3层在线数据处理网络:底层的分布式传感器在工作环境中生成原始数据信息,无人机收集传感器的原始数据并对其进行预处理,紧接着无人机将预处理结果传输到中心云服务器进行进一步分析.此外,参考文献[71]还提出了一种基于深度强化学习的无人机路径规划算法,将无人机的局部观察作为神经网络的输入,预测候选动作的奖励(收集的数据量),选取最大的奖励作为最优策略;同时提出了一种基于李雅普诺夫优化的在线联合资源管理算法,在保证高效的数据收集的同时降低能耗. ...
... ]提出了一种基于MEC技术的3层在线数据处理网络:底层的分布式传感器在工作环境中生成原始数据信息,无人机收集传感器的原始数据并对其进行预处理,紧接着无人机将预处理结果传输到中心云服务器进行进一步分析.此外,参考文献[71]还提出了一种基于深度强化学习的无人机路径规划算法,将无人机的局部观察作为神经网络的输入,预测候选动作的奖励(收集的数据量),选取最大的奖励作为最优策略;同时提出了一种基于李雅普诺夫优化的在线联合资源管理算法,在保证高效的数据收集的同时降低能耗. ...
... 根据无人机数量和涉及的方法对面向地面网络的无人机边缘智能计算研究进行分类
| 涉及方法 | 单无人机 | 多无人机 |
| 非智能方法 | 参考文献[31][32][33][34][35][36][37][38][40][41][43][44][45][47][48][49][51][53][54][55][56][57][58][59][60][61][64][67][68][69] | 参考文献[46][50][52][63][70] |
| 智能方法 | 参考文献[42][62][65][66] | 参考文献[9][39][71] |
从表4可以得出:第一,目前工作主要集中在采用非智能方法进行卸载的单无人机研究场景,关于多无人机和涉及智能方法的研究不多;第二,相较于单无人机,多无人机的覆盖面积更广,但需要额外考虑地面用户与无人机的关联及多架无人机之间协同的问题;第三,运用深度强化学习等智能方法使得每架无人机能够根据当前环境状态和动作价值函数做出最大奖励的下一步动作,包括飞向哪个地点、为哪些地面用户提供服务等,进而在复杂、动态的网络中实现整个系统的最优卸载决策.传统方法每次预设的状态有所变化时都需要重新迭代,而结合智能方法能使计算任务卸载更加灵活,能够更好地适应现实环境中的动态场景.同时也发现了当前面向地面网络的无人机边缘智能计算研究中存在的一些不足,如现有工作并未考虑无人机能够提供的计算服务种类问题,研究场景往往默认无人机能够提供地面节点所需的一切计算服务.而在实际应用中,无人机有限的机载资源导致其只能提供一种或几种计算服务,故下一步的研究可以从这个角度着手,对当前工作进行进一步的深化和完善. ...








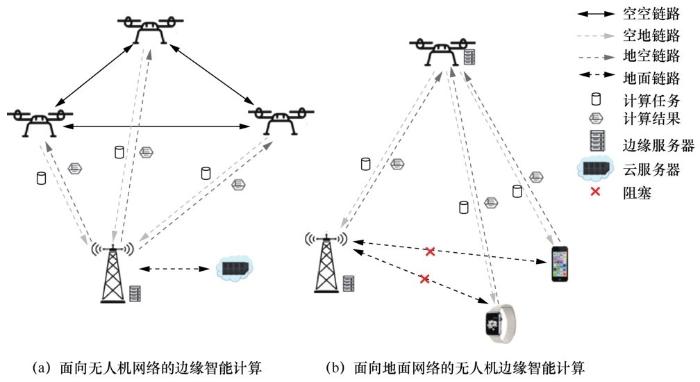

{kind=link}
{kind=link}