

电信科学 ›› 2022, Vol. 38 ›› Issue (8): 17-27.doi: 10.11959/j.issn.1000-0801.2022240
曾子鸣1, 董超1, 朱小军2, 贾子晔1
修回日期:2022-08-02
出版日期:2022-08-20
发布日期:2022-08-01
作者简介:曾子鸣(1999- ),男,南京航空航天大学电子信息工程学院硕士生,主要研究方向为仿生无人机集群架构基金资助:Ziming ZENG1, Chao DONG1, Xiaojun ZHU2, Ziye JIA1
Revised:2022-08-02
Online:2022-08-20
Published:2022-08-01
Supported by:摘要:
摘 要:无人机集群作战是未来战场的重要组成部分。集群内的无人机通过协作,进行载荷的互补与任务协调,以提升系统整体性能。自然界中如蚂蚁、狼、鸽子、鱼等群体,其个体与单架无人机行为类似,而蚁群、狼群、鸽群又能依靠个体间的规则,通过协调与组织实现更为复杂的行为。不同生物集群展现的能力不同,在战场上能承担的任务也各不相同。从生物集群的群体特征出发,考虑生物间的拓扑和交流机制,提出了一种仿生无人机集群的融合架构。不同种类的仿生无人机集群自由地融合,增强了无人机集群的异构性,提高仿生无人机集群架构的协调能力。
中图分类号:
曾子鸣, 董超, 朱小军, 贾子晔. 面向群体快速融合的仿生无人机集群架构[J]. 电信科学, 2022, 38(8): 17-27.
Ziming ZENG, Chao DONG, Xiaojun ZHU, Ziye JIA. Bionic UAV architecture for fast swarm fusion[J]. Telecommunications Science, 2022, 38(8): 17-27.
表1
生物集群与无人机集群运作逻辑对比"
| 特点 | 生物集群 | 集群实例 | 无人机集群 |
| 组织结构的分布式 | 不存在中心节点,各自与邻近个体通信 | 狼群围猎时,常采取包抄战术 | 去中心化程度高,呈现分布式架构 |
| 行为主体的简单性 | 动物个体遵循非常简单的行为规则与通信规则 | 鱼群的个体通过侧线反馈机制,能有效躲避捕食者 | 单个无人机成本低,功能较少,可承担的任务单一 |
| 作用模式的灵活性 | 对环境的变化具有适应性 | 面对不同的风速时,鸽子会采取不同的队形前进 | 需要面对位置的战场环境以及多变的任务需求 |
| 系统整体的智能性 | 组成的集群效率更高,涌现基于群体的智能行为 | 蚁群通过信息素交流,共同完成迁移、进食等行为 | 无人机集群通过协同作战,达到更高的作战效率 |

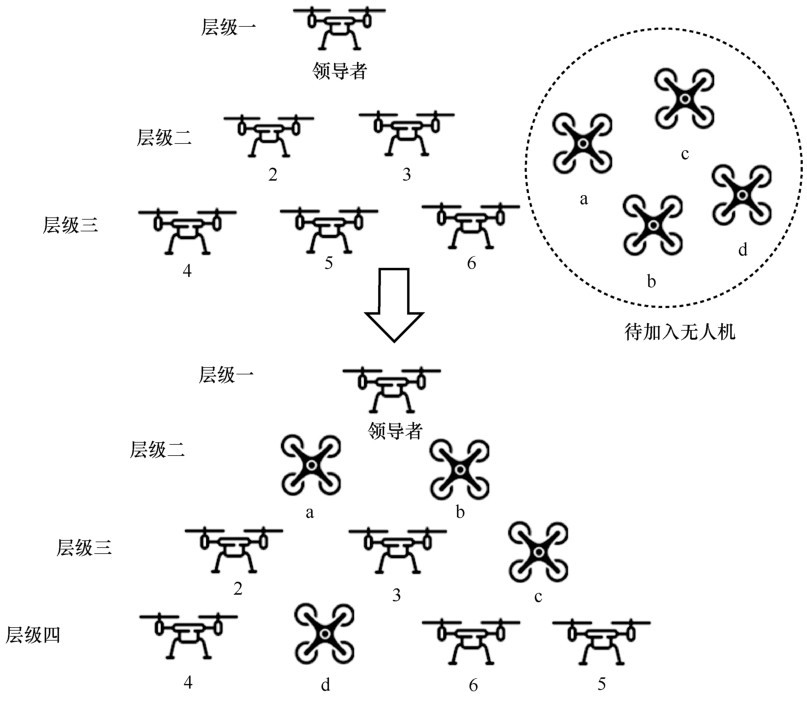
图1
无人机编队变换过程"


图2
鸽群编队重构示意图"

表2
无人机初始位置信息"
| 无人机编号 | x/m | y/m | h/m |
| 1 | 6 | 6 | 6 |
| 2 | 5 | 6 | 5 |
| 3 | 6 | 5 | 5 |
| 4 | 4 | 6 | 4 |
| 5 | 5 | 5 | 4 |
| 6 | 6 | 4 | 4 |
| a | 6 | 6 | 5 |
| b | 6 | 5 | 6 |
| c | 5 | 5 | 6 |
| d | 4 | 5 | 6 |
表3
无人机层级示意图"
| 无人机类型 | 鸽群层级 | 无人机编号 |
| 领航者无人机 | 一 | 1 |
| 跟随者无人机 | 二三 | 2、34、5、6 |
| 待接收无人机 | 无 | a、b、c、d |
表4
新鸽群编队无人机位置信息"
| 无人机编号 | x/m | y/m | h/m |
| 1 | 10 | 10 | 10 |
| 2 | 8 | 10 | 8 |
| 3 | 9 | 9 | 8 |
| 4 | 7 | 10 | 7 |
| 5 | 10 | 7 | 7 |
| 6 | 9 | 8 | 7 |
| a | 9 | 10 | 9 |
| b | 10 | 9 | 9 |
| c | 10 | 8 | 8 |
| d | 8 | 9 | 7 |
表5
新鸽群编队无人机层级示意图"
| 无人机类型 | 鸽群层级 | 无人机编号 |
| 领航者无人机 | 一 | 1 |
| 跟随者无人机 | 二 | a、b |
| 三 | 2、3、c | |
| 四 | 4、d、6、5 |

图3
鸽群编队重构位置变化"


图4
无人机群重构位置变化"
| [1] | 邹立岩, 张明智, 柏俊汝 ,等. 无人机集群作战建模与仿真研究综述[J]. 战术导弹技术, 2021(3): 98-108. |
| ZOU L Y , ZHANG M Z , BAI J R ,et al. A survey of modeling and simulation of UAS swarm operation[J]. Tactical Missile Technology, 2021(3): 98-108. | |
| [2] | THERAULAZ G , BONABEAU E . A brief history of stigmergy[J]. Artificial Life, 1999,5(2): 97-116. |
| [3] | 段海滨, 李沛 . 基于生物群集行为的无人机集群控制[J]. 科技导报, 2017,35(7): 17-25. |
| DUAN H B , LI P . Autonomous control for unmanned aerial vehicle swarms based on biological collective behaviors[J]. Science & Technology Review, 2017,35(7): 17-25. | |
| [4] | 孙佳琛, 王金龙, 陈瑾 ,等. 群体智能协同通信:愿景、模型和关键技术[J]. 中国科学:信息科学, 2020,50(3): 307-317. |
| SUN J C , WANG J L , CHEN J ,et al. Cooperative communication based on swarm intelligence:vision,model,and key technology[J]. Scientia Sinica (Informationis), 2020,50(3): 307-317. | |
| [5] | TAHIR A , B?LING J , HAGHBAYAN M H ,et al. Swarms of unmanned aerial vehicles—A survey[J]. Journal of Industrial Information Integration, 2019,16:100106. |
| [6] | 吴新峰, 顾鑫, 陆婷婷 ,等. 一种基于马赛克战理念的协同作战系统设计:方案设想及关键技术探索[J]. 指挥与控制学报, 2020,6(3): 278-283. |
| WU X F , GU X , LU T T ,et al. Design of cooperative operation system based on mosaic warfare concept:scheme assumption and key technology exploration[J]. Journal of Command and Control, 2020,6(3): 278-283. | |
| [7] | 段海滨, 邱华鑫 . 基于群体智能的无人机集群自主控制[M]. 北京: 科学出版社, 2018. |
| DUAN H B , QIU H X . Unmanned aerial vehicle swarm autonomous control based on swarm intelligence[M]. Beijing: Science Press, 2018. | |
| [8] | 尚玉昌 . 动物行为学[M]. 北京: 北京大学出版社, 2005. |
| SHANG Y C . Ethology[M]. Beijing: Peking University Press, 2005. | |
| [9] | 邱华鑫, 段海滨, 范彦铭 . 基于鸽群行为机制的多无人机自主编队[J]. 控制理论与应用, 2015,32(10): 1298-1304. |
| QIU H X , DUAN H B , FAN Y M . Multiple unmanned aerial vehicle autonomous formation based on the behavior mechanism in pigeon flocks[J]. Control Theory & Applications, 2015,32(10): 1298-1304. | |
| [10] | 杨庆, 段海滨 . 仿鸿雁编队的无人机集群飞行验证[J]. 工程科学学报, 2019,41(12): 1599-1608. |
| YANG Q , DUAN H B . Verification of unmanned aerial vehicle swarm behavioral mechanism underlying the formation of Anser cygnoides[J]. Chinese Journal of Engineering, 2019,41(12): 1599-1608. | |
| [11] | 邱华鑫, 段海滨, 范彦铭 ,等. 鸽群交互模式切换模型及其同步性分析[J]. 智能系统学报, 2020,15(2): 334-343. |
| QIU H X , DUAN H B , FAN Y M ,et al. Pigeon flock interaction pattern switching model and its synchronization analysis[J]. CAAI Transactions on Intelligent Systems, 2020,15(2): 334-343. | |
| [12] | 范林飞 . 基于鸽群算法的多无人机协同编队[D]. 南京:南京航空航天大学, 2020. |
| FAN L F . Cooperative formation of multi-UAVs based on pigeon algorithm[D]. Nanjing:Nanjing University of Aeronautics and Astronautics, 2020. | |
| [13] | 郑超学 . 基于红外信息素通信的仿生蚁群觅食路径规划研究[D]. 武汉:武汉科技大学, 2020. |
| ZHENG C X . Research on foraging path planning of bionic ant colony based on infrared pheromone communication[D]. Wuhan:Wuhan University of Science and Technology, 2020. | |
| [14] | DORIGO M , STüTZLE T , . The ant colony optimization metaheuristic:algorithms,applications,and advances handbook of metaheuristics[M]. 2003. |
| [15] | ZHAO D S , LI X X , YANG J . An improved wolf pack algorithm for sustainable machining parameter optimization[C]// Proceedings of 2018 IEEE 3rd Advanced Information Technology,Electronic and Automation Control Conference. Piscataway:IEEE Press, 2018: 34-38. |
| [16] | 李晓磊 . 一种新型的智能优化方法-人工鱼群算法[D]. 杭州:浙江大学, 2003. |
| LI X L . A new intelligent optimization method-artificial fish school algorithm[D]. Hangzhou:Zhejiang University, 2003. | |
| [17] | SUN W F , TANG M , ZHANG L J ,et al. A survey of using swarm intelligence algorithms in IoT[J]. Sensors (Basel,Switzerland), 2020,20(5): 1420. |
| [18] | NAYYAR A , LE D N , NHU N G . The handbook titled “advances in swarm intelligence for optimizing problems in computer science”[M].S.l.: Taylor & Francis Group, 2018. |
| [19] | ARNOLD R , CAREY K , ABRUZZO B ,et al. What is A robot swarm:a definition for swarming robotics[C]// Proceedings of 2019 IEEE 10th Annual Ubiquitous Computing,Electronics &Mobile Communication Conference. Piscataway:IEEE Press, 2019: 74-81. |
| [20] | ZHOU Y K , RAO B , WANG W . UAV swarm intelligence:recent advances and future trends[J]. IEEE Access, 2019(8): 183856-183878. |
| [21] | CAMPION M , RANGANATHAN P , FARUQUE S . UAV swarm communication and control architectures:a review[J]. Journal of Unmanned Vehicle Systems, 2019,7(2): 93-106. |
| [22] | HASSANIEN A , EMARY E . Swarm Intelligence[M]. S. l.: CRC Press, 2015. |
| [23] | 王钦禾, 尹永鑫, 杨宁 . 多无人机编队飞行控制关键技术[C]// 北京力学会第二十七届学术年会论文集. [出版地:出版者不详], 2021: 28-29. |
| WANG Q H , YIN Y X , YANG N . Key technologies of flight control of multi-UAV formation[C]// Proceedings of the 27th Annual Conference of Beijing Institute of Mechanics.[S.l.:s.n.], 2021: 28-29. | |
| [24] | 李腾 . 有人/无人机协同编队控制技术研究[D]. 南京:南京航空航天大学, 2017. |
| LI T . Cooperative formation control technology for manned/unmanned aerial vehicles[D]. Nanjing:Nanjing University of Aeronautics and Astronautics, 2017. | |
| [25] | 乔琛 . 面向无人机集群的协同编队控制算法与仿真实现[D]. 成都:电子科技大学, 2021. |
| QIAO C . Collaborative formation control algorithm and simulation for UAV swarm[D]. Chengdu:University of Electronic Science and Technology of China, 2021. | |
| [26] | COUZIN I D , KRAUSE J , FRANKS N R ,et al. Effective leadership and decision-making in animal groups on the move[J]. Nature, 2005,433(7025): 513-516. |
| [27] | LUO Q N , DUAN H B . Distributed UAV flocking control based on homing pigeon hierarchical strategies[J]. Aerospace Science and Technology, 2017(70): 257-264. |
| [28] | WUBBEN J , AZNAR P , FABRA F ,et al. Toward secure,efficient,and seamless reconfiguration of UAV swarm formations[C]// Proceedings of 2020 IEEE/ACM 24th International Symposium on Distributed Simulation and Real Time Applications (DS-RT). Piscataway:IEEE Press, 2020: 1-7. |
| [29] | 朱文金, 王罗昊佶, 蔡志强, ,等. 考虑级联失效的可重构网络抗毁性研究[J]. 西北工业大学学报, 2021,39(4): 839-846. |
| ZHU W J , WANG L , CAI Z Q ,et al. Resilience analysis for reconfigurable network with cascading failures[J]. Journal of Northwestern Polytechnical University, 2021,39(4): 839-846. | |
| [30] | 王璨, 高辰子 . 无人机集群通信网络拓扑重构及关键技术研究[J]. 舰船电子工程, 2021,41(5): 49-52,82. |
| WANG C , GAO C Z . Research on communication networks topology reconstruction and key technologies of UAV swarm[J]. Ship Electronic Engineering, 2021,41(5): 49-52,82. | |
| [31] | 左嘉娴 . 无人机集群网络拓扑重构及关键技术研究[D]. 西安:西安工业大学, 2022. |
| ZUO J X . Research on Topological reconstruction of UAV swarm network and key technology[D]. Xi'an:Xi'an Technological University, 2022. | |
| [32] | SOUZA F C , SANTOS S R B D , DE OLIVEIRA A M ,et al. Influence of network topology on UAVs formation control based on distributed consensus[C]// Proceedings of 2022 IEEE International Systems Conference (SysCon). Piscataway:IEEE Press, 2022: 1-8. |
| [1] | 高凯辉, 李丹. 数据中心网络性能保障研究综述[J]. 电信科学, 2023, 39(6): 1-21. |
| [2] | 李彧, 李召召, 吕平, 刘勤让. 全维可重构的多模态网络交换芯片架构设计[J]. 电信科学, 2023, 39(6): 22-32. |
| [3] | 李炯, 胡宇翔, 崔鹏帅, 田乐, 董永吉. 面向多模态网络环境的网络模态增量式部署机制研究[J]. 电信科学, 2023, 39(6): 33-43. |
| [4] | 郭泽华, 朱昊文, 徐同文. 面向分布式机器学习的网络模态创新[J]. 电信科学, 2023, 39(6): 44-51. |
| [5] | 刘爱华, 骆汉光, 温建中, 占治国. 面向多模态网络的隔离转发技术研究[J]. 电信科学, 2023, 39(6): 52-60. |
| [6] | 邹涛, 张慧峰, 高万鑫, 徐琪, 沈丛麒, 朱俊, 潘仲夏, 国兴昌. 面向智能制造的多模态网络应用技术研究[J]. 电信科学, 2023, 39(6): 61-72. |
| [7] | 何耀宇, 张超. 面向无人机应用的低轨卫星通信技术适航分析[J]. 电信科学, 2023, 39(6): 96-104. |
| [8] | 王甫镔, 孙士渊, 王梦辉, 杨昉, 王小斐, 宋健. 多光源可见光通信关键技术[J]. 电信科学, 2023, 39(5): 3-10. |
| [9] | 马天洋, 陈雄斌, 徐义武. 基于可见光通信的零能耗光标签[J]. 电信科学, 2023, 39(5): 20-27. |
| [10] | 刘思聪, 苏丹萍, 卫天阔, 王先耀. 基于多节点协作的鲁棒可见光智能定位[J]. 电信科学, 2023, 39(5): 28-41. |
| [11] | 胡珈玮, 刘晓谦, 唐昕柯, 董宇涵. 基于DQN的UUV辅助水下无线光通信轨迹规划系统[J]. 电信科学, 2023, 39(5): 42-47. |
| [12] | 刘晓谦, 唐昕柯, 董宇涵. 水下无线光MIMO链路空间信道建模[J]. 电信科学, 2023, 39(5): 48-56. |
| [13] | 张嗣宏, 张健. 以ChatGPT为代表的生成式AI对通信行业的影响和应对思考[J]. 电信科学, 2023, 39(5): 67-75. |
| [14] | 马晓亮, 刘英, 杜德泉, 安玲玲. 运营商智能客服的关键技术和发展趋势[J]. 电信科学, 2023, 39(5): 76-89. |
| [15] | 唐鑫新, 曾学文, 凌致远, 宋磊. 可编程数据平面技术综述[J]. 电信科学, 2023, 39(4): 1-16. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
|
||