

Journal on Communications ›› 2024, Vol. 45 ›› Issue (1): 31-40.doi: 10.11959/j.issn.1000-436x.2024003
• Topics: Intelligent Communication and Network Technologies for Manned/Unmanned Cooperation Systems • Previous Articles
Zhuo LU, Qihui WU, Fuhui ZHOU
Revised:2023-09-20
Online:2024-01-01
Published:2024-01-01
Supported by:CLC Number:
Zhuo LU, Qihui WU, Fuhui ZHOU. Algorithm for intelligent collaborative target search and trajectory planning of MAV/UAV[J]. Journal on Communications, 2024, 45(1): 31-40.
"
"
| 参数 | 含义 |
| M ,U,N | 有人机数量、无人机数量、干扰信号源数量 |
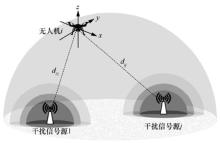
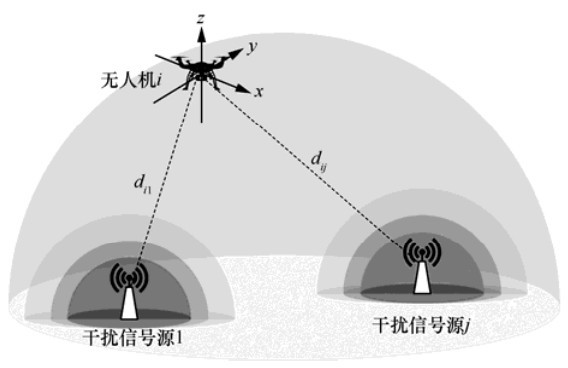
| dij(t) | 无人机i与干扰信号源 j在时刻t的距离 |
| Pij(t) | 无人机i与干扰信号源 j在时刻t的瞬时功率 |
| L,G T,GR | 路径损耗、发射天线增益、接收天线增益 |
| actor网络权重、critic网络权重 | |
| target actor网络权重、target critic网络权重 | |
| B | 经验回放池大小 |
| Nb | 样本大小 |
| φ | 样本索引 |
| τ | 软更新率 |
| γ | 折扣因子 |
"
"
"
"

"

"
"
"
| [1] | 姚富强, 张余, 柳永祥 . 电磁频谱安全与控制[J]. 指挥与控制学报, 2015,1(3): 278-283. |
| YAO F Q , ZHANG Y , LIU Y X . Security and control for electromagnetic spectrum[J]. Journal of Command and Control, 2015,1(3): 278-283. | |
| [2] | 孙佳琛, 王金龙, 丁国如 ,等. 频谱知识图谱:面向未来频谱管理的智能引擎[J]. 通信学报, 2021,42(5): 1-12. |
| SUN J C , WANG J L , DING G R ,et al. Spectrum knowledge graph:an intelligent engine facing future spectrum management[J]. Journal on Communications, 2021,42(5): 1-12. | |
| [3] | 孙仲康, 郭福成, 冯道旺 ,等. 单站无源定位跟踪技术[M]. 北京: 国防工业出版社, 2008. |
| SUN Z K , GUO F C , FENG D W ,et al. Passive location and tracking technology by single observer[M]. Beijing: National Defense Industry Press, 2008. | |
| [4] | 刘聪锋 . 无源定位与跟踪[M]. 西安: 西安电子科技大学出版社, 2011. |
| LIU C F . Passive location and tracking[M]. Xi'an: Xidian University Press, 2011. | |
| [5] | BARTON D K . A half century of radar[J]. IEEE Transactions on Microwave Theory and Techniques, 1984,32(9): 1161-1170. |
| [6] | SKOLNIK M I . Fifty years of radar[J]. Proceedings of the IEEE, 1985,73(2): 182-197. |
| [7] | 唐小明, 何友, 夏明革 . 基于机会发射的无源雷达系统发展评述[J]. 现代雷达, 2002,24(2): 1-6. |
| TANG X M , HE Y , XIA M G . An overview of development of passive radar system based on transmitters of opportunity[J]. Modern Radar, 2002,24(2): 1-6. | |
| [8] | 陈新颖, 盛敏, 李博 ,等. 面向6G的无人机通信综述[J]. 电子与信息学报, 2022,44(3): 781-789. |
| CHEN X Y , SHENG M , LI B ,et al. Survey on unmanned aerial vehicle communications for 6G[J]. Journal of Electronics & Information Technology, 2022,44(3): 781-789. | |
| [9] | ASGHAR S S A , SOLTANIZADEH H . Optimal trajectories for two UAVs in localization of multiple RF sources[J]. Transactions of the Institute of Measurement and Control, 2016,38(8): 908-916. |
| [10] | ASGHAR S S A , SOLTANIZADEH H . Single- and multi-UAV trajectory control in RF source localization[J]. Arabian Journal for Science and Engineering, 2017,42(2): 459-466. |
| [11] | WANG Z , CHEN G , BLASCH E ,et al. Jamming emitter localization with multiple UAVs equipped with smart antennas[J]. Proceedings of SPIE-The International Society for Optical Engineering, 2010,7696: 1-9. |
| [12] | WANG J , HINTON J , LIU J C L . RF based target search and localization with microUVA[C]// Proceedings of the 2016 International Conference on Computational Science and Computational Intelligence (CSCI). Piscataway:IEEE Press, 2016: 1077-1082. |
| [13] | TSUJI H , GRAY D , SUZUKI M ,et al. Radio location estimation experiment using array antennas for high altitude platforms[C]// Proceedings of the 18th IEEE International Symposium on Personal,Indoor and Mobile Radio Communications. Piscataway:IEEE Press, 2007: 1-5. |
| [14] | PACK D , YORK G , FIERRO R . Information-based cooperative control for multiple unmanned aerial vehicles[C]// Proceedings of the IEEE International Conference on Networking,Sensing and Control. Piscataway:IEEE Press, 2006: 446-450. |
| [15] | DOGANCAY K . UAV path planning for passive emitter localization[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012,48(2): 1150-1166. |
| [16] | WANG L Y , HUANG Y . UAV-based estimation of direction of arrival:an approach based on image processing[C]// Proceedings of the 2020 International Conference on Wireless Communications and Signal Processing (WCSP). Piscataway:IEEE Press, 2020: 1165-1169. |
| [22] | WU S J . Illegal radio station localization with UAV-based Q-learning[J]. China Communications, 2018,15(12): 122-131. |
| [23] | JAAKKOLA T , SINGH S P , JORDAN M I . Reinforcement learning algorithm for partially observable Markov decision problems[C]// Proceedings of Advances in Neural Information Processing Systems. Massachusetts:MIT Press, 1995:7. |
| [24] | SHI W S , LI J L , WU H Q ,et al. Drone-cell trajectory planning and resource allocation for highly mobile networks:a hierarchical DRL approach[J]. IEEE Internet of Things Journal, 2021,8(12): 9800-9813. |
| [25] | BOUHAMED O , GHAZZAI H , BESBES H ,et al. Autonomous UAV navigation:a DDPG-based deep reinforcement learning approach[C]// Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS). Piscataway:IEEE Press, 2020: 1-5. |
| [17] | 陈杰, 辛斌 . 有人/无人系统自主协同的关键科学问题[J]. 中国科学:信息科学, 2018,48(9): 1270-1274. |
| CHEN J , XIN B . Key scientific problems in the autonomous cooperation of manned-unmanned systems[J]. Scientia Sinica (Informationis), 2018,48(9): 1270-1274. | |
| [18] | LI Z , BRAUN T , ZHAO X H ,et al. A narrow-band indoor positioning system by fusing time and received signal strength via ensemble learning[J]. IEEE Access, 2018,6: 9936-9950. |
| [19] | VANSTEENWEGEN P , SOUFFRIAU W , OUDHEUSDEN D V . The orienteering problem:a survey[J]. European Journal of Operational Research, 2011,209(1): 1-10. |
| [20] | 叶媛媛, 闵春平, 沈林成 . 多UCAV任务分配的混合遗传算法与约束处理[J]. 控制与决策, 2006,21(7): 781-786. |
| YE Y Y , MIN C P , SHEN L C . Hybrid genetic algorithm and constraint handling for multiple UCAV mission assigning[J]. Control and Decision, 2006,21(7): 781-786. | |
| [21] | MNIH V , KAVUKCUOGLU K , SILVER D ,et al. Human-level control through deep reinforcement learning[J]. Nature, 2015,518: 529-533. |
| [1] | Lingjin KONG, Kai MEI, Xiaoran LIU, Jun XIONG, Haitao ZHAO, Jibo WEI. Design and implementation of online learning assisted intelligent receiver [J]. Journal on Communications, 2024, 45(1): 18-30. |
| [2] | Hao YIN, Jibo WEI, Haitao ZHAO, Jiao ZHANG, Haijun WANG, Baoquan REN. Intelligent communication and networking key technologies for manned/unmanned cooperation: states-of-the-art and trends [J]. Journal on Communications, 2024, 45(1): 1-17. |
| [3] | Yuntao WANG, Zhou SU, Qichao XU, Yiliang LIU, Haixia PENG, Hao LUAN. Secure and collaborative spectrum sensing scheme based on audit game [J]. Journal on Communications, 2023, 44(12): 1-14. |
| [4] | Yutong ZHANG, Yuming PENG, Boya DI, Lingyang SONG. Heterogeneous resource cooperative game in space-ground computing power network [J]. Journal on Communications, 2023, 44(12): 15-27. |
| [5] | Yangyang NIU, Zhiqing WEI, Zhiyong FENG. Space-time spectrum sharing based on game theory:dynamic access and penalty strategy [J]. Journal on Communications, 2023, 44(12): 28-38. |
| [6] | Zining WANG, Min LIN, Fei LI, Lve HAN, Weiping ZHU. Distributed robust beamforming algorithm for spectral coexistence in satellite and high altitude platform networks [J]. Journal on Communications, 2023, 44(12): 39-49. |
| [7] | Bai ZHAO, Min LIN, Shengjie XIAO, Ming CHENG, Yifan FENG, Lvxi YANG. Rate splitting based robust secure transmission scheme in RIS-assisted satellite-terrestrial integrated network [J]. Journal on Communications, 2023, 44(12): 50-60. |
| [8] | Ruyan WANG, Xianyi YE, Peng HE, Yaping CUI, Dapeng WU, Fedotov Alexander. LEO satellite constellation design with multi-QoS guarantee for non-terrestrial network [J]. Journal on Communications, 2023, 44(12): 61-77. |
| [9] | Fanglin GU, Jinlin PENG, Yuzhen HUANG, Shengqun CAO, Haitao ZHAO, Jibo WEI. Novel direct sequence spread spectrum communication method [J]. Journal on Communications, 2023, 44(12): 78-85. |
| [10] | Cheng ZHANG, Jiaye ZHU, Zening LIU, Yongming HUANG. Multi-agent reinforcement learning based dynamic optimization algorithm of CRE offset for heterogeneous networks [J]. Journal on Communications, 2023, 44(12): 86-98. |
| [11] | Junbing LI, Youjun ZENG, Xiaoping ZENG, Guojun LI, Chenxi BAI. Short-term prediction network for short-wave MUF based on model-data dual-driven [J]. Journal on Communications, 2023, 44(12): 99-111. |
| [12] | Bowen ZHAO, Yao ZHU, Yang XIAO, Qingqi PEI, Xiaoguo LI, Ximeng LIU. Rational-security and fair two-party comparison protocol [J]. Journal on Communications, 2023, 44(12): 112-123. |
| [13] | Yun ZHANG, Jing ZHOU, Jingwei HUANG, Shujuan YU, Liya HUANG. Channel estimation for OFDM system based on deep learning [J]. Journal on Communications, 2023, 44(12): 124-133. |
| [14] | Zhiguo SUN, Zhao WANG, Zengmao CHEN, Rongchen SUN. Double reputation and multi-angle weight-based cooperative spectrum sensing method against SSDF attacks [J]. Journal on Communications, 2023, 44(12): 134-145. |
| [15] | Jing ZHANG, Lin MA, Chulong LIANG, Hongxu GAO. Massive unsourced multiple access scheme based on block sequence codebook and compressed sensing [J]. Journal on Communications, 2023, 44(12): 171-180. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
|
||