| 1 |
刘凯, 李浥东, 林伟鹏. 车辆再识别技术综述[J]. 智能科学与技术学报, 2020, 2(1): 10-25.
|
|
LIU K, LI Y D, LIN W P. A survey on vehicle re-identification[J]. Chinese Journal of Intelligent Science and Technology, 2020, 2(1): 10-25.
|
| 2 |
SEVILLA-LARA L, SUN D Q, JAMPANI V, et al. Optical flow with semantic segmentation and localized layers[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2016: 3889-3898.
|
| 3 |
于晓明, 李思颖, 史胜楠. 混合高斯融合三帧差的运动目标检测改进算法[J]. 红外技术, 2019, 41(3): 256-261.
|
|
YU X M, LI S Y, SHI S N. An improved algorithm for moving target detection using a Gaussian mixture with three-frame difference[J]. Infrared Technology, 2019, 41(3): 256-261.
|
| 4 |
SONG Z Y, ALI S, BOUGUILA N. Background subtraction using infinite asymmetric Gaussian mixture models with simultaneous feature selection[J]. IET Image Processing, 2020, 14(11): 2321-2332.
|
| 5 |
LUO J H, LIN C H. Pure FPGA implementation of an HOG based real-time pedestrian detection system[J]. Sensors(Basel), 2018, 18(4):1174.
|
| 6 |
曾娟, 李守义, 张洪昌. 图像分区域多特征融合斜向车辆检测算法研究[J]. 公路交通科技, 2020, 37(8): 99-107.
|
|
ZENG J, LI S Y, ZHANG H C. Study on sub-region multi-feature image fusion oblique vehicle detection algorithm[J]. Journal of Highway and Transportation Research and Development, 2020, 37(8): 99-107.
|
| 7 |
GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]//Proceedings of 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2014: 580-587.
|
| 8 |
GIRSHICK R. Fast R-CNN[C]//Proceedings of 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2016: 1440-1448.
|
| 9 |
REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[C]//Proceedings of IEEE Transactions on Pattern Analysis and Machine Intelligence. Piscataway: IEEE Press, 2016: 1137-1149.
|
| 10 |
HE K M, ZHANG X Y, REN S Q, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916.
|
| 11 |
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 779-788.
|
| 12 |
田思佳, 顾强, 胡蓉, 等. 一种基于深度学习的机械臂分拣方法[J]. 智能科学与技术学报, 2020, 2(3): 268-274.
|
|
TIAN S J, GU Q, HU R, et al. A robot sorting method based on deep learning[J]. Chinese Journal of Intelligent Science and Technology, 2020, 2(3): 268-274.
|
| 13 |
刘肯, 何姣姣, 张永平, 等. 改进YOLO的车辆检测算法[J]. 现代电子技术, 2019, 42(13): 47-50.
|
|
LIU K, HE J J, ZHANG Y P, et al. Improved YOLO vehicle detection algorithm[J]. Modern Electronics Technique, 2019, 42(13): 47-50.
|
| 14 |
REDMON J, FARHADI A. YOLO9000: better, faster, stronger[C]//Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2017: 6517-6525.
|
| 15 |
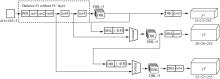
REDMON J, FARHADI A. YOLOv3: an incremental improvement[J].arXiv preprint, 2018, arXiv: 1804.02767.
|
| 16 |
阮激扬. 基于YOLO的目标检测算法设计与实现[D]. 北京: 北京邮电大学, 2019.
|
|
RUAN J Y. Design and implementation of object detection algorithm based on YOLO[D]. Beijing: Beijing University of Posts and Telecommunications, 2019.
|
| 17 |
杨眷玉. 基于卷积神经网络的物体识别研究与实现[D]. 成都: 电子科技大学, 2016.
|
|
YANG J Y. Research and implementation of object detection based on convolutional neural networks[D]. Chengdu: University of Electronic Science and Technology of China, 2016.
|

 ), Lei ZHOU1
), Lei ZHOU1