智能科学与技术学报 ›› 2020, Vol. 2 ›› Issue (3): 275-283.doi: 10.11959/j.issn.2096-6652.202030
所属专题: 边缘计算
王大伟1( ),王卓1,王鹏1,王志刚1,王海涛2
),王卓1,王鹏1,王志刚1,王海涛2
Dawei WANG1(),Zhuo WANG1,Peng WANG1,Zhigang WANG1,Haitao WANG2
摘要:
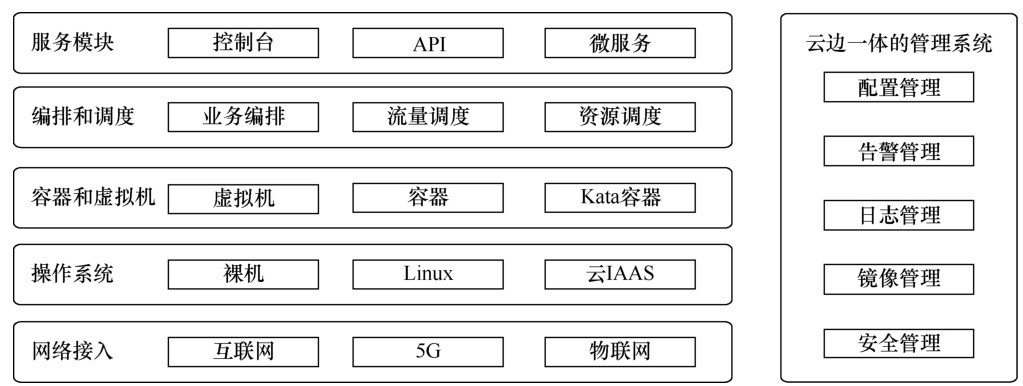
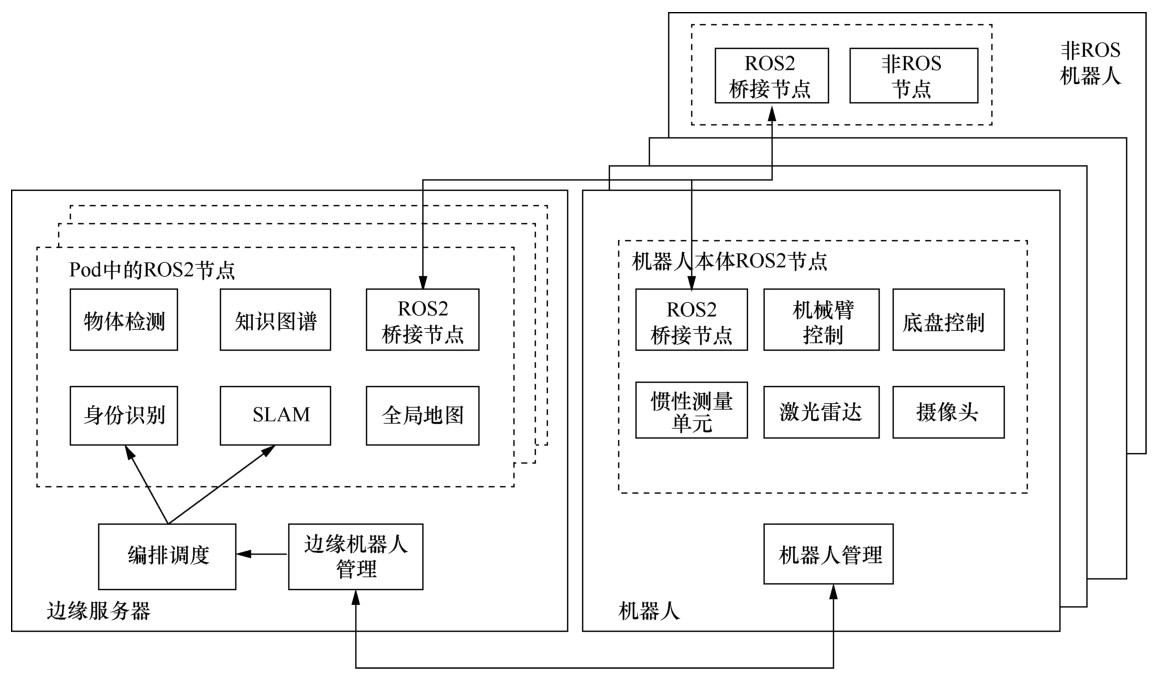
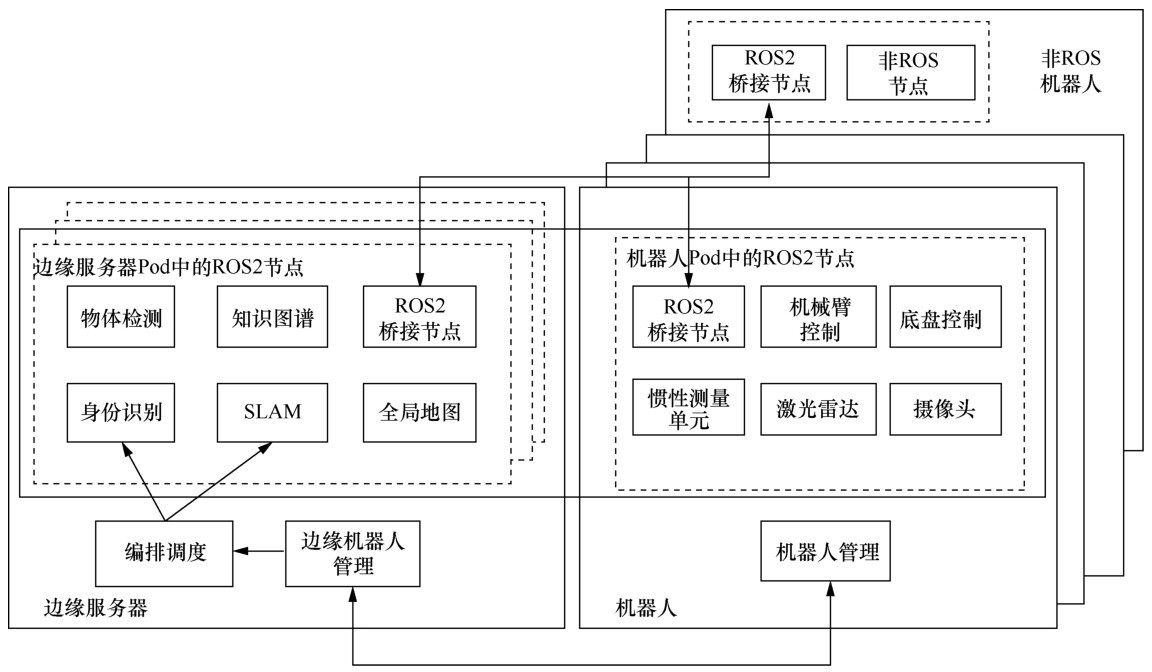
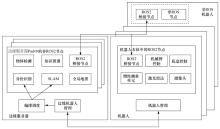
随着人工智能的飞速发展,全球机器人市场在持续扩大,机器人的能力从执行固定的操作发展到自主感知、理解和决策。但要实现机器人的大规模应用,需要机器人在有限功耗的限制下,具备强大的计算能力和低廉的部署成本。利用边缘计算提供性价比更高的服务,增强机器人本体的计算能力,实现规模化部署是实现这一目标的关键。分析了实现边缘增强的机器人系统面临的挑战,提出了基于边缘计算的云原生机器人系统,并探讨了实现该系统的4种可行的技术方案。提出的系统是由基于机器人本体的智能系统向云-边-端融合的多机器人协同的智能系统发展的趋势,也是实现机器人大规模应用的关键技术。
中图分类号:
|
||