| [1] |
YANN L C , . Deep learning has outlived its usefulness as a buzz-phrase[Z]. 2018.
|
| [2] |
BENGIO Y , . From system 1 deep learning to system 2 deep learning[C]// Proceedings of the 33rd Conference on Neural Information Processing Systems.[S.l.:s.n.], 2019.
|
| [3] |
GARCEZ A A , LAMB L C . Neurosymbolic AI:the 3rd wave[J]. arXiv preprint, 2020,arXiv:2012.05876.
|
| [4] |
张钹, 朱军, 苏航 . 迈向第三代人工智能[J]. 中国科学:信息科学, 2020,50(9): 1281-1302.
|
|
ZHANG B , ZHU J , SU H . Toward the third generation of artificial intelligence[J]. Scientia Sinica (Informationis), 2020,50(9): 1281-1302.
|
| [5] |
GALLI E , KAHNEMAN D . Thinking,fast and slow[J]. Journal of Public Finance and Public Choice, 2011,29(1/2/3): 214-215.
|
| [6] |
MAO J Y , GAN C , KOHLI P ,et al. The neuro-symbolic concept learner:interpreting scenes,words,and sentences from natural supervision[J]. arXiv preprint,2019, 2019,arXiv:1904.12584.
|
| [7] |
RAEDT L , MANHAEVE R , DUMANCIC S ,et al. Neuro-symbolic =neural+logical+ probabilistic[C]// Proceedings of the 14th International Workshop on Neural-Symbolic Learning and Reasoning.[S.l.:s.n.], 2019.
|
| [8] |
KAMPFFMEYER M , CHEN Y B , LIANG X D ,et al. Rethinking knowledge graph propagation for zero-shot learning[C]// Proceedings of 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway:IEEE Press, 2019: 11479-11488.
|
| [9] |
EVANS R , GREFENSTETTE E . Learning explanatory rules from noisy data[J]. Journal of Artificial Intelligence Research, 2018,61: 1-64.
|
| [10] |
SI X J , RAGHOTHAMAN M , HEO K ,et al. Synthesizing datalog programs using numerical relaxation[J]. arXiv preprint, 2019,arXiv:1906.00163.
|
| [11] |
KALYAN A , MOHTA A , POLOZOV O ,et al. Neural-guided deductive search for real-time program synthesis from examples[J]. arXiv preprint, 2018,arXiv:1804.01186.
|
| [12] |
ZHOU Z H . Abductive learning:towards bridging machine learning and logical reasoning[J]. Science China Information Sciences, 2019,62(7): 1-3.
|
| [13] |
XU J Y , ZHANG Z L , FRIEDMAN T ,et al. A semantic loss function for deep learning with symbolic knowledge[J]. arXiv preprint, 2017,arXiv:1711.11157.
|
| [14] |
CHEN R Q , CHEN T S , HUI X L ,et al. Knowledge graph transfer network for few-shot recognition[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2020,34(7): 10575-10582.
|
| [15] |
LI A X , LUO T G , LU Z W ,et al. Large-scale few-shot learning:knowledge transfer with class hierarchy[C]// Proceedings of 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway:IEEE Press, 2019: 7205-7213.
|
| [16] |
VAN EMDEN M H , KOWALSKI R A . The semantics of predicate logic as a programming language[J]. Journal of the ACM, 1976,23(4): 733-742.
|
| [17] |
GARRETT C R , CHITNIS R , HOLLADAY R ,et al. Integrated task and motion planning[J]. Annual Review of Control,Robotics,and Autonomous Systems, 2021,4: 265-293.
|
| [18] |
CASTAMAN N , PAGELLO E , MENEGATTI E ,et al. Receding horizon task and motion planning in changing environments[J]. arXiv preprint, 2020,arXiv:200903139.
|
| [19] |
HASLUM P , LIPOVETZKY N , MAGAZZENI D ,et al. An introduction to the planning domain definition language[J]. Synthesis Lectures on Artificial Intelligence and Machine Learning, 2019,13(2): 1-187.
|
| [20] |
FOX M , LONG D . PDDL2.1:an extension to PDDL for expressing temporal planning domains[J]. Journal of Artificial Intelligence Research, 2003,20: 61-124.
|
| [21] |
LITTMAN M L . PPDDL1.0:an extension to PDDL for expressing planning domains with probabilistic effects[Z]. 2004.
|
| [22] |
SERRANO S A , SANTIAGO E , MARTINEZ-CARRANZA J , ,et al. Knowledge-based hierarchical POMDPs for task planning[J]. Journal of Intelligent & Robotic Systems, 2021,101(4): 1-30.
|
| [23] |
WANG Y F . Hierarchical task planning for space manipulator with multi-constraint[J]. Journal of Mechanical Engineering, 2017,53(11): 104.
|
| [24] |
MANHAEVE R , DUMAN?I? S , KIMMIG A ,et al. Deepproblog:neural probabilistic logic programming[J]. arXiv preprint, 2018,arXiv:180510872.
|
| [25] |
GU S X , HOLLY E , LILLICRAP T ,et al. Deep reinforcement learning for robotic manipulation with asynchronous off-policy updates[C]// Proceedings of 2017 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 2017: 3389-3396.
|
| [26] |
ZHANG F Y , LEITNER J , MILFORD M ,et al. Towards vision-based deep reinforcement learning for robotic motion control[J]. arXiv preprint, 2015,arXiv:151103791.
|
| [27] |
DIXON J , BELL K . Electric vehicles:battery capacity,charger power,access to charging and the impacts on distribution networks[J]. eTransportation, 2020,4:100059.
|
| [28] |
KE Q D , ZHANG P , ZHANG L ,et al. Electric vehicle battery disassembly sequence planning based on frame-subgroup structure combined with genetic algorithm[J]. Frontiers in Mechanical Engineering, 2020,6:576642.
|
| [29] |
MAHARSHI S , REDDY K J . Cloud based disassembly of electric vehicle battery[J]. Procedia Manufacturing, 2019,30: 136-142.
|
| [30] |
BLANKEMEYER S , WIENS D , WIESE T ,et al. Investigation of the potential for an automated disassembly process of BEV batteries[J]. Procedia CIRP, 2021,98: 559-564.
|
| [31] |
HARPER G , SOMMERVILLE R , KENDRICK E ,et al. Recycling lithium-ion batteries from electric vehicles[J]. Nature, 2019,575(7781): 75-86.
|
| [32] |
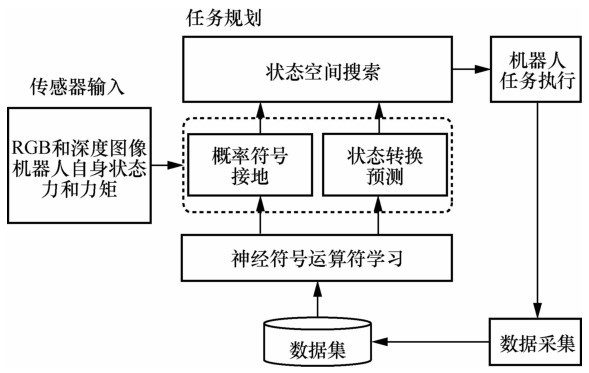
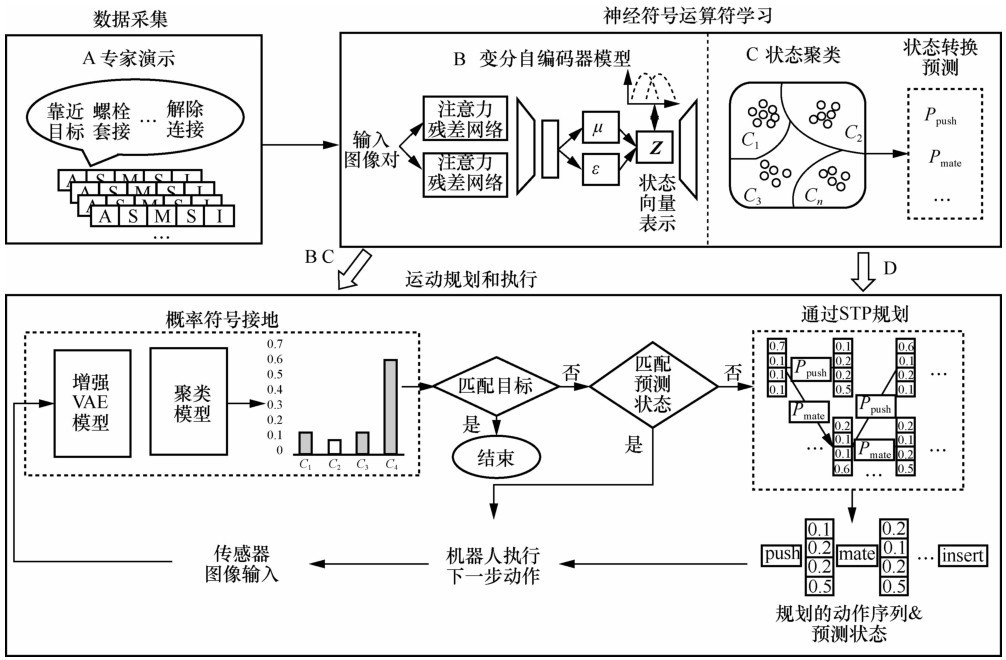
任伟, 王志刚, 杨华 ,等. 基于神经符号的动力电池拆解任务与运动规划[J]. 计算机研究与发展, 2021(12): 2604-2617.
|
|
REN W , WANG Z G , YANG H ,et al. NeuroSymbolic task and motion planner for disassembly electric vehicle batteries[J]. Journal of Computer Research and Development, 2021(12): 2604-2617.
|
| [33] |
DU Y D , WANG W S , WANG Z G ,et al. Learning symbolic operators:a neurosymbolic solution for autonomous disassembly of electric vehicle battery[J]. arXiv preprint, 2022,arXiv:2206.03027.
|


 Scopus
Scopus