


智能科学与技术学报 ›› 2022, Vol. 4 ›› Issue (4): 493-502.doi: 10.11959/j.issn.2096-6652.2022049
曹翔1, 孙长银1,2
修回日期:2022-11-06
出版日期:2022-12-15
发布日期:2022-12-01
作者简介:曹翔(1981- ),男,博士,安徽大学人工智能学院副教授,主要研究方向为水下机器人控制、多水下机器人协作等基金资助:Xiang CAO1, Changyin SUN1,2
Revised:2022-11-06
Online:2022-12-15
Published:2022-12-01
Supported by:摘要:
无人水下航行器(UUV)的任务规划直接关系到水下作业的效率。由于水下环境复杂,不确定事件频发,有时UUV按照最初的规划很难完成任务。针对UUV任务规划问题,提出基于不确定事件威胁度评估的UUV任务重规划策略。首先,UUV根据任务点的分布进行初始任务规划,采用自组织网络算法为UUV规划访问多任务点的时间顺序及访问任务点的最短路径。其次,判断 UUV 执行任务过程中出现的不确定事件类型,并转换为贝叶斯网络的形式。最后,利用贝叶斯网络对不确定事件的威胁度进行评估。如果威胁度大于阈值,则 UUV 进行任务重规划;否则,UUV 按照初始规划继续执行任务。在多种不确定事件场景中进行任务规划仿真,结果显示所提的算法能够保证UUV作业的安全,且提高了任务的完成率。
中图分类号:
曹翔,孙长银. 基于不确定事件威胁度评估的UUV任务重规划[J]. 智能科学与技术学报, 2022, 4(4): 493-502.
Xiang CAO,Changyin SUN. UUV mission re-planning based on threat assessment of uncertain events[J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 493-502.

图1
UUV任务重规划流程"
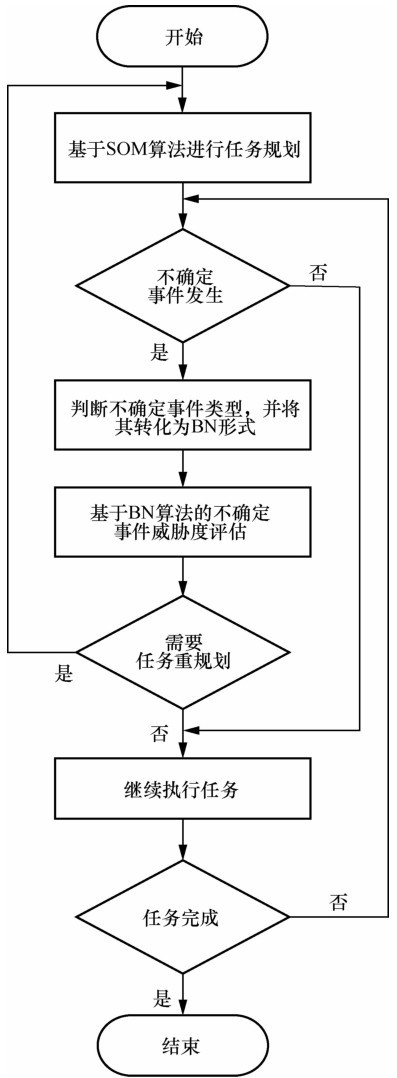
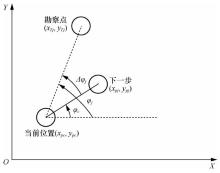
图2
方向信度函数"
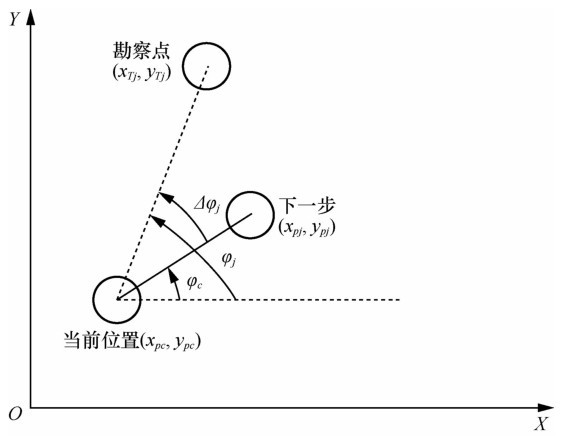

图3
不确定事件的BN"

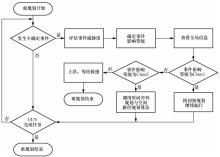
图4
UUV任务重规划流程"

表1
不确定事件威胁度的条件概率"
| 能量 | 障碍物 | 海流 | 安全概率 | 威胁概率 |
| 充足 | 安全 | 强烈 | 0.25 | 0.75 |
| 轻微 | 0.85 | 0.15 | ||
| 危险 | 强烈 | 0.15 | 0.85 | |
| 轻微 | 0.25 | 0.75 | ||
| 匮乏 | 安全 | 强烈 | 0.12 | 0.88 |
| 轻微 | 0.15 | 0.85 | ||
| 危险 | 强烈 | 0 | 1 | |
| 轻微 | 0.05 | 0.95 |
表2
不确定事件的威胁度条件概率"
| 时间点 | 安全概率 | 威胁概率 | 威胁等级 |
| 1 | 1 | 0 | 1 |
| 2 | 1 | 0 | 1 |
| 3 | 1 | 0 | 1 |
| 4 | 1 | 0 | 1 |
| 5 | 0.9 | 0.1 | 1 |
| 6 | 0.88 | 0.12 | 1 |
| 7 | 0.75 | 0.25 | 1 |
| 8 | 0.79 | 0.21 | 1 |
| 9 | 0.81 | 0.19 | 1 |
| 10 | 0.73 | 0.27 | 1 |
| 11 | 0.89 | 0.11 | 1 |
| 12 | 0.91 | 0.09 | 1 |
| 13 | 1 | 0 | 1 |
| 14 | 1 | 0 | 1 |
| 15 | 1 | 0 | 1 |

图5
无不确定事件发生的UUV轨迹"
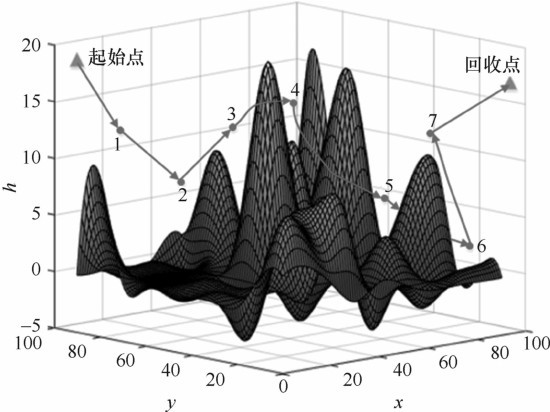
表3
障碍物事件发生的威胁度条件概率"
| 时间点 | 安全概率 | 威胁概率 | 威胁等级 |
| 1 | 1 | 0 | 1 |
| 2 | 1 | 0 | 1 |
| 3 | 0.63 | 0.37 | 1 |
| 4 | 0.42 | 0.58 | 2 |
| 5 | 0.39 | 0.61 | 2 |
| 6 | 0.75 | 0.25 | 1 |
| 7 | 0.41 | 0.59 | 2 |
| 8 | 0.43 | 0.57 | 2 |
| 9 | 0.71 | 0.29 | 1 |
| 10 | 0.68 | 0.32 | 1 |
| 11 | 0.55 | 0.45 | 1 |
| 12 | 0.58 | 0.42 | 1 |
| 13 | 0.73 | 0.27 | 1 |
| 14 | 1 | 0 | 1 |
| 15 | 1 | 0 | 1 |
图6
障碍物事件发生的UUV轨迹"

图7
海流威胁事件发生的UUV轨迹"
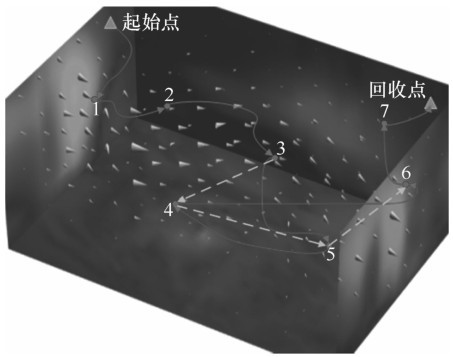
表4
海流事件发生的威胁度条件概率"
| 时间点 | 安全概率 | 威胁概率 | 威胁等级 |
| 1 | 0.85 | 0.15 | 1 |
| 2 | 0.81 | 0.19 | 1 |
| 3 | 0.78 | 0.22 | 1 |
| 4 | 0.84 | 0.16 | 1 |
| 5 | 0.63 | 0.37 | 1 |
| 6 | 0.42 | 0.58 | 2 |
| 7 | 0.38 | 0.62 | 2 |
| 8 | 0.49 | 0.51 | 2 |
| 9 | 0.71 | 0.29 | 1 |
| 10 | 0.85 | 0.15 | 1 |
| 11 | 0.89 | 0.11 | 1 |
| 12 | 0.91 | 0.09 | 1 |
| 13 | 0.95 | 0.05 | 1 |
| 14 | 0.96 | 0.04 | 1 |
| 15 | 0.98 | 0.02 | 1 |

图8
多种不确定事件发生的UUV轨迹"

表5
多种不确定事件发生的威胁度条件概率"
| 时间点 | 安全概率 | 威胁概率 | 威胁等级 |
| 1 | 0.95 | 0.05 | 1 |
| 2 | 0.87 | 0.13 | 1 |
| 3 | 0.82 | 0.18 | 1 |
| 4 | 0.71 | 0.29 | 1 |
| 5 | 0.48 | 0.52 | 2 |
| 6 | 0.32 | 0.68 | 2 |
| 7 | 0.47 | 0.53 | 2 |
| 8 | 0.62 | 0.38 | 1 |
| 9 | 0.45 | 0.55 | 2 |
| 10 | 0.38 | 0.62 | 2 |
| 11 | 0.46 | 0.54 | 2 |
| 12 | 0.73 | 0.27 | 1 |
| 13 | 0.85 | 0.15 | 1 |
| 14 | 0.98 | 0.02 | 1 |
| 15 | 0.98 | 0.02 | 1 |
表6
不同算法的性能比较"
| 算法 | 碰撞次数/次 | 完成任务次数/次 |
| 市场机制算法 | 16 | 75 |
| 生物启发神经网络算法 | 9 | 88 |
| 本文算法 | 0 | 100 |
| [1] | MCMAHON J , PLAKU E . Autonomous data collection with timed communication constraints for unmanned underwater vehicles[J]. IEEE Robotics and Automation Letters, 2021,6(2): 1832-1839. |
| [2] | CAO X , REN L , SUN C Y . Research on obstacle detection and avoidance of Special Topic:Autonomous Underwater Vehicle based on forward-looking sonar[J]. IEEE Transactions on Neural Networks and Learning Systems, 2022. |
| [3] | LING H F , ZHU T , HE W X ,et al. Cooperative search method for multiple AUVs based on target clustering and path optimization[J]. Natural Computing, 2021,20(1): 3-10. |
| [4] | CAO X , REN L , SUN C Y . Dynamic target tracking control of Special Topic:Autonomous Underwater Vehicle based on trajectory prediction[J]. IEEE Transactions on Cybernetics, 2022. |
| [5] | DAI S L , HE S D , CAI H ,et al. Adaptive leader-follower formation control of under actuated surface vehicles with guaranteed performance[J]. IEEE Transactions on Systems,Man,and Cybernetics:Systems, 2022,52(3): 1997-2008. |
| [6] | 王雨倩, 丁嵘 . 基于群体智能成果的路径规划程序自动生成系统[J]. 智能科学与技术学报, 2022,4(2): 255-263. |
| WANG Y Q , DING R . Automatic path planning program generation system based on swarm intelligence results[J]. Chinese Journal of Intelligent Science and Technology, 2022,4(2): 255-263. | |
| [7] | MATARIC M J , . Minimizing complexity in controlling a mobile robot population[C]// Proceedings of 1992 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 1992: 830-835. |
| [8] | PARKER L E . Heterogeneous multi-robot cooperation[R]. 1994. |
| [9] | MIYATA N , OTA J , ARAI T ,et al. Cooperative transport by multiple mobile robots in unknown static environments associated with real-time task assignment[J]. IEEE Transactions on Robotics and Automation, 2002,18(5): 769-780. |
| [10] | WANG Z Y , LI M , LI J ,et al. A task allocation algorithm based on market mechanism for multiple robot systems[C]// Proceedings of 2016 IEEE International Conference on Real-time Computing and Robotics. Piscataway:IEEE Press, 2016: 150-155. |
| [11] | 朱毅, 张涛, 程农 ,等. 多UAV协同任务规划研究[J]. 系统仿真学报, 2008,20(S2): 194-199. |
| ZHU Y , ZHANG T , CHENG N ,et al. Research on cooperative mission planning of multiple UAVs[J]. Journal of System Simulation, 2008,20(S2): 194-199. | |
| [12] | ZLOT R , STENTZ A . Market-based multirobot coordination for complex tasks[J]. The International Journal of Robotics Research, 2006,25(1): 73-101. |
| [13] | ZHU D Q , HUANG H , YANG S Y . Dynamic task assignment and path planning of multi-AUV system based on an improved self-organizing map and velocity synthesis method in three-dimensional underwater workspace[J]. IEEE Transactions on Cybernetics, 2013,43(2): 504-514. |
| [14] | ZHU D Q , CAO X , SUN B ,et al. Biologically inspired self-organizing map applied to task assignment and path planning of an AUV system[J]. IEEE Transactions on Cognitive and Developmental Systems, 2018,10(2): 304-313. |
| [15] | 段群杰, 张铭钧, 张菁 . 基于模糊神经网络的水下机器人局部路径规划方法[J]. 船舶工程, 2001,23(1): 54-58,61. |
| DUAN Q J , ZHANG M J , ZHANG J . Local path planning method for AUV based on fuzzy-neural network[J]. Ship Engineering, 2001,23(1): 54-58,61. | |
| [16] | 沈晶, 顾国昌, 刘海波 . 未知动态环境中基于分层强化学习的移动机器人路径规划[J]. 机器人, 2006,28(5): 544-547,552. |
| SHEN J , GU G C , LIU H B . Mobile robot path planning based on hierarchical reinforcement learning in unknown dynamic environment[J]. Robot, 2006,28(5): 544-547,552. | |
| [17] | GON?ALVES P , SOBRAL J , FERREIRA L A . Unmanned aerial vehicle safety assessment modelling through petri Nets[J]. Reliability Engineering & System Safety, 2017,167: 383-393. |
| [18] | ALI F , KIM E K , KIM Y G . Type-2 fuzzy ontology-based semantic knowledge for collision avoidance of Special Topic:Autonomous Underwater Vehicles[J]. Information Sciences, 2015,295: 441-464. |
| [19] | GRIFFITHS G , BRITO M . Predicting risk in missions under sea ice with Special Topic:Autonomous Underwater Vehicles[C]// Proceedings of 2008 IEEE/OES Special Topic:Autonomous Underwater Vehicles. Piscataway:IEEE Press, 2009: 1-7. |
| [20] | 刘厂, 赵俊翔, 胡海 . 基于双贝叶斯估计的动态威胁运动状态估计[J]. 郑州大学学报(工学版), 2017,38(2): 55-60. |
| LIU C , ZHAO J X , HU H . Research on motion status estimation of dynamic threat base on double Bayes estimation[J]. Journal of Zhengzhou University (Engineering Science), 2017,38(2): 55-60. | |
| [21] | ALMEIDA A , LóPEZ-DE-IPI?A D , . Assessing ambiguity of context data in intelligent environments:towards a more reliable context managing system[J]. Sensors (Basel), 2012,12(4): 4934-4951. |
| [22] | 么洪飞 . 不确定条件下UUV态势感知、威胁评估与自主决策方法研究[D]. 哈尔滨:哈尔滨工程大学, 2020. |
| YAO H F . Research on situation awareness,threat assessment and autonomous decision method of UUV under uncertain conditions[D]. Harbin:Harbin Engineering University, 2020. | |
| [23] | VASIMUDDIN M , ALURU S . Parallel exact dynamic Bayesian network structure learning with application to gene networks[C]// Proceedings of 2017 IEEE 24th International Conference on High Performance Computing (HiPC). Piscataway:IEEE Press, 2017: 42-51. |
| [24] | CAO X , ZHU D Q , YANG S X . Multi-AUV target search based on bioinspired neurodynamics model in 3-D underwater environments[J]. IEEE Transactions on Neural Networks and Learning Systems, 2016,27(11): 2364-2374. |
| [1] | 张佳欣, 张森林, 刘妹琴, 董山玲, 郑荣濠. 面向海洋环境自适应采样的多AUV协同定位[J]. 智能科学与技术学报, 2022, 4(4): 503-512. |
| [2] | 蔡莹皓, 杨华, 安璇, 王文硕, 杜沂东, 张嘉韬, 王志刚. 神经符号学及其应用研究[J]. 智能科学与技术学报, 2022, 4(4): 560-570. |
| [3] | 赵超, 许杰, 陈星宇, 梅魁志, 兰旭光. 机器人持续学习进展与展望[J]. 智能科学与技术学报, 2022, 4(3): 308-323. |
| [4] | 崔少伟, 王硕, 胡静怡, 张超凡. 面向机器人操作任务的视触觉传感技术综述[J]. 智能科学与技术学报, 2022, 4(2): 186-199. |
| [5] | 徐德, 秦方博. 机器人自动轴孔装配研究进展[J]. 智能科学与技术学报, 2022, 4(2): 200-211. |
| [6] | 葛悦光, 张少林, 蔡莹皓, 鲁涛, 温大勇, 王海涛, 王硕. 本体知识表示方法在机器人领域的应用研究综述[J]. 智能科学与技术学报, 2022, 4(2): 212-222. |
| [7] | 胡静怡, 崔少伟, 张超凡, 张伯约, 王硕. 基于触觉感知和伺服的物体三维边缘重建方法[J]. 智能科学与技术学报, 2022, 4(2): 233-245. |
| [8] | 董璐, 熊爱玲. 基于改进RRT*-Smart的复杂动态环境下的无人艇路径规划[J]. 智能科学与技术学报, 2022, 4(2): 264-276. |
| [9] | 王腾, 潘晶, 董璐, 孙长银. 面向防疫的智能导诊机器人关键技术及应用[J]. 智能科学与技术学报, 2021, 3(2): 187-194. |
| [10] | 王日中, 李慧平, 崔迪, 徐德民. 基于深度强化学习算法的自主式水下航行器深度控制[J]. 智能科学与技术学报, 2020, 2(4): 354-360. |
| [11] | 傅汇乔, 唐开强, 邓归洲, 王鑫鹏, 陈春林. 基于深度强化学习的六足机器人运动规划[J]. 智能科学与技术学报, 2020, 2(4): 361-371. |
| [12] | 王大伟,王卓,王鹏,王志刚,王海涛. 基于边缘计算的云原生机器人系统[J]. 智能科学与技术学报, 2020, 2(3): 275-283. |
| [13] | 付海军,陈世超,林懿伦,熊刚,胡斌. 人在回路的混合增强智能在Sawyer的研究与验证[J]. 智能科学与技术学报, 2019, 1(3): 280-286. |
| [14] | 张翔,刘红卫,刘卓群,闫振国,陈小前,黄奕勇. 空间智能软体机械臂动力学建模与控制[J]. 智能科学与技术学报, 2019, 1(1): 52-61. |
| [15] | 郑亚君,薛磊,董璐,王庆领. 基于UWB定位技术的多移动机器人编队控制[J]. 智能科学与技术学报, 2019, 1(1): 83-87. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
|
||