


Chinese Journal of Intelligent Science and Technology ›› 2022, Vol. 4 ›› Issue (2): 186-199.doi: 10.11959/j.issn.2096-6652.202222
• Special Topic: Autonomous Agent Learning for Dexterous and Accurate Manipulations • Previous Articles Next Articles
Shaowei CUI1,2, Shuo WANG1,3,4, Jingyi HU1,2, Chaofan ZHANG1,3
Online:2022-06-15
Published:2022-06-01
Supported by:CLC Number:
Shaowei CUI, Shuo WANG, Jingyi HU, et al. A survey of visuotactile sensing technologies for robotic manipulation[J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(2): 186-199.
"
"

"

"

"
"

"
"

"

"

"

"
"

"
| 传感器 | 结构形态 | 接触胶体层 | 光源 | 相机系统 | 几何重建 | 力估计 | 滑动感知 |
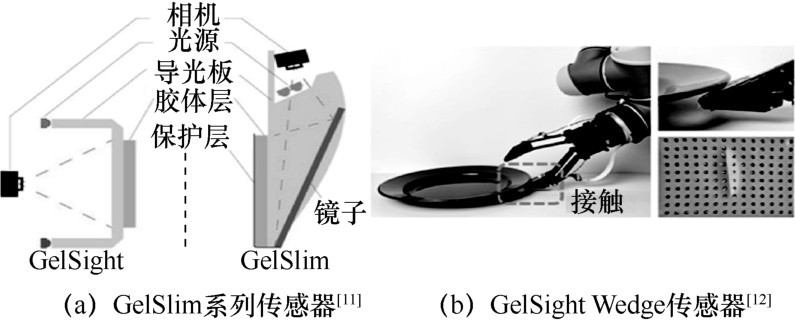
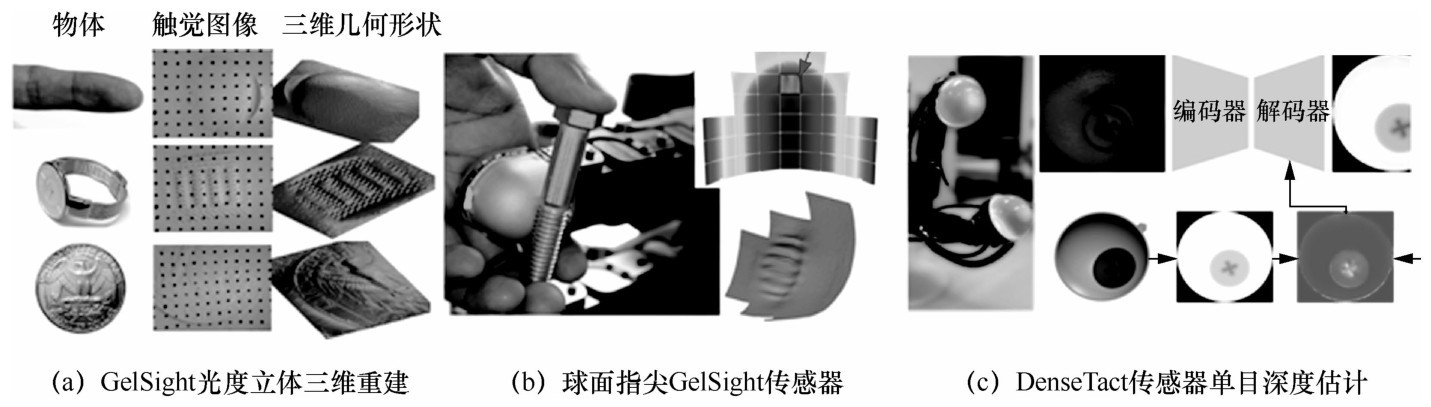
| GelSight[ | 指尖 | 阵列标记点 | RGB | 单目 | 光度立体 | 神经网络 | 接触模型 |
| GelSlim[ | 指尖 | 阵列标记点 | RGB | 单目 | 光度立体 | 有限元 | 接触模型 |
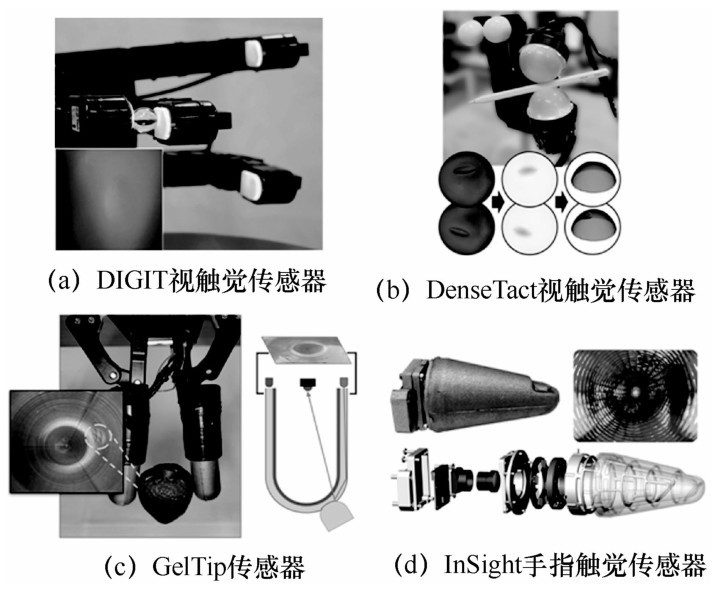
| DIGIT[ | 指尖 | 无标记点 | RGB | 单目 | 待开发 | 无 | 无 |
| GelTip[ | 手指 | 无标记点 | RGB | 单目 | 光度立体 | 无 | 无 |
| InSight[ | 手指 | 无标记点 | RGB | 单目 | 光度立体 | 神经网络 | 无 |
| DenseTact[ | 指尖 | 无标记点 | RGB | 单目 | 神经网络 | 无 | 无 |
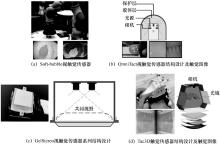
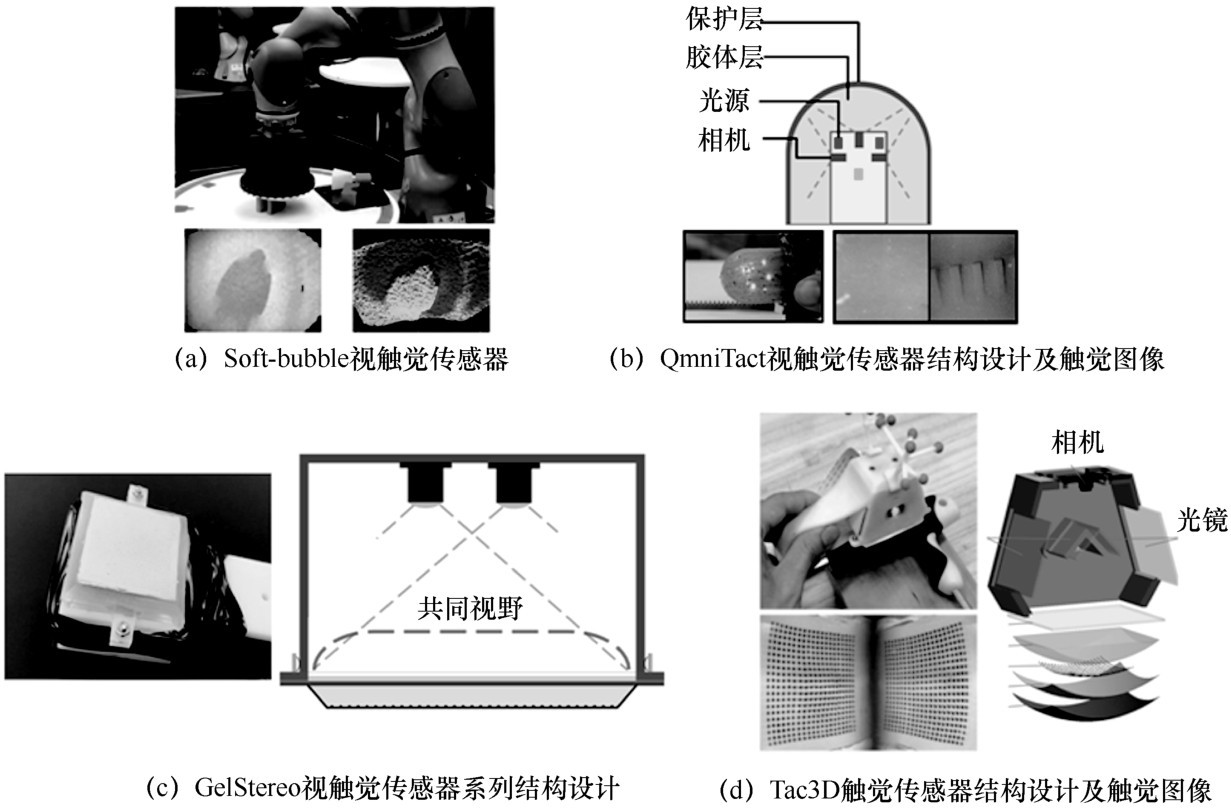
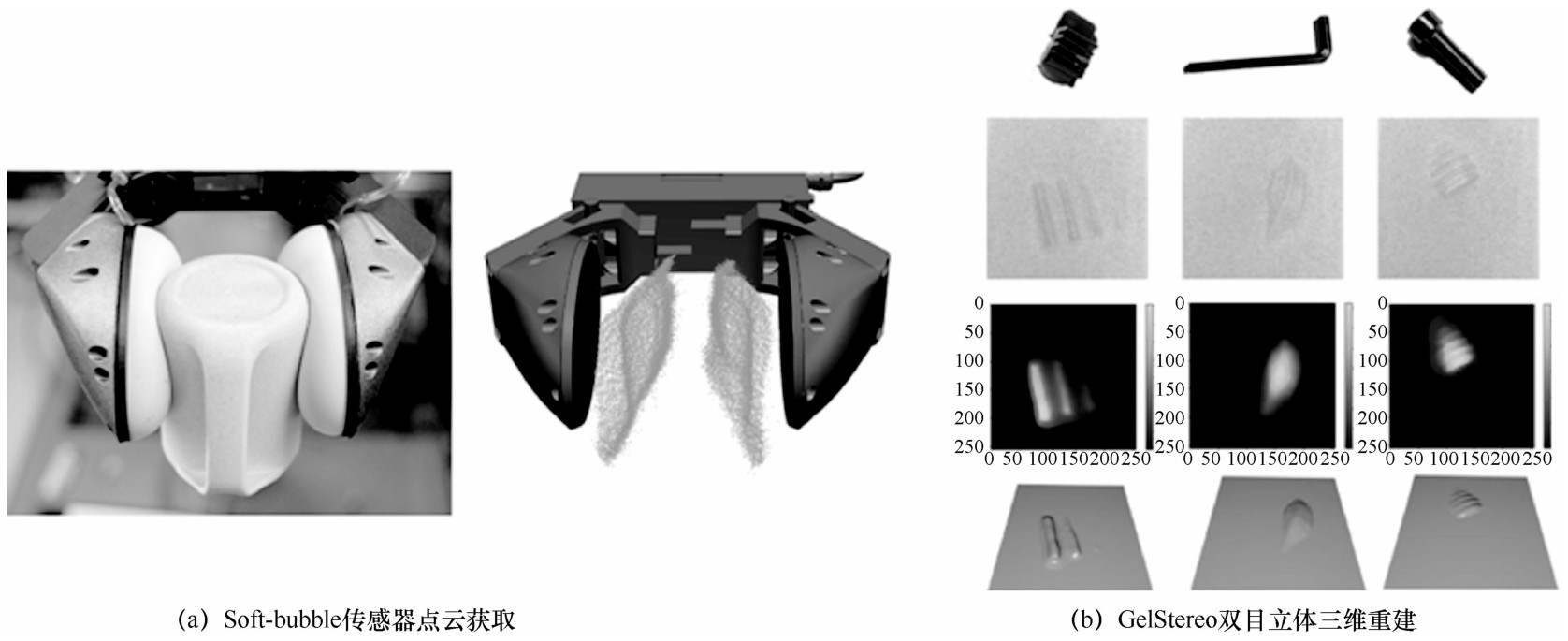
| Soft-bubble[ | 手掌 | 稠密标记点 | 单色 | 单目+深度 | 深度相机 | 无 | 无 |
| GelStereo[ | 指尖 | 阵列标记点 | 单色 | 双目 | 双目立体 | 神经网络 | 神经网络 |
| OmniTact[ | 指尖 | 无标记点 | RGB | 多目 | 光度立体 | 无 | 无 |
| Tac3D[ | 手掌 | 阵列标记点 | 单色 | 虚拟双目 | 双目立体 | 有限元 | 接触模型 |
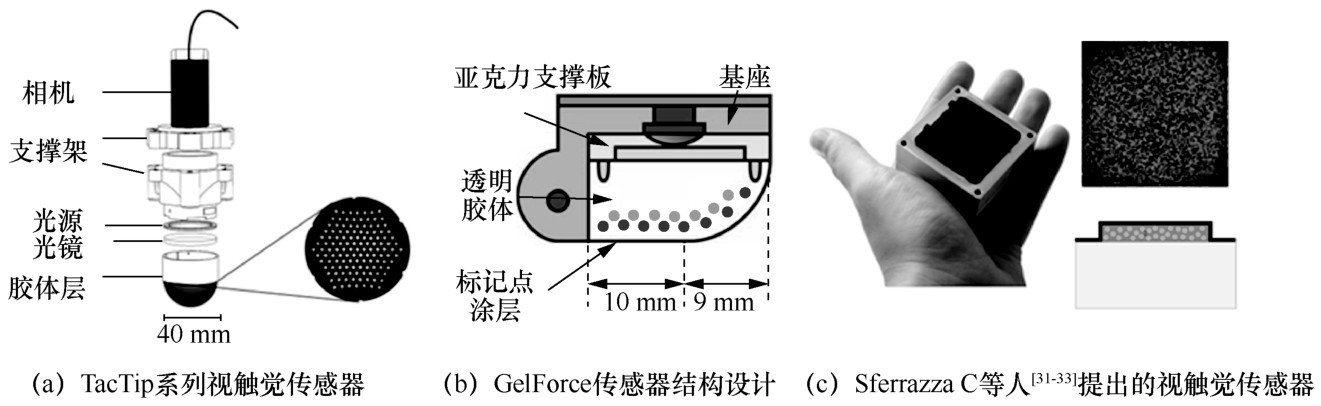
| TacTip[ | 指尖 | 阵列标记探针 | 单色 | 单目 | 无 | 无 | 神经网络 |
| GelForce[ | 指尖 | 双层标记点 | 单色 | 单目 | 无 | 有限元 | 无 |
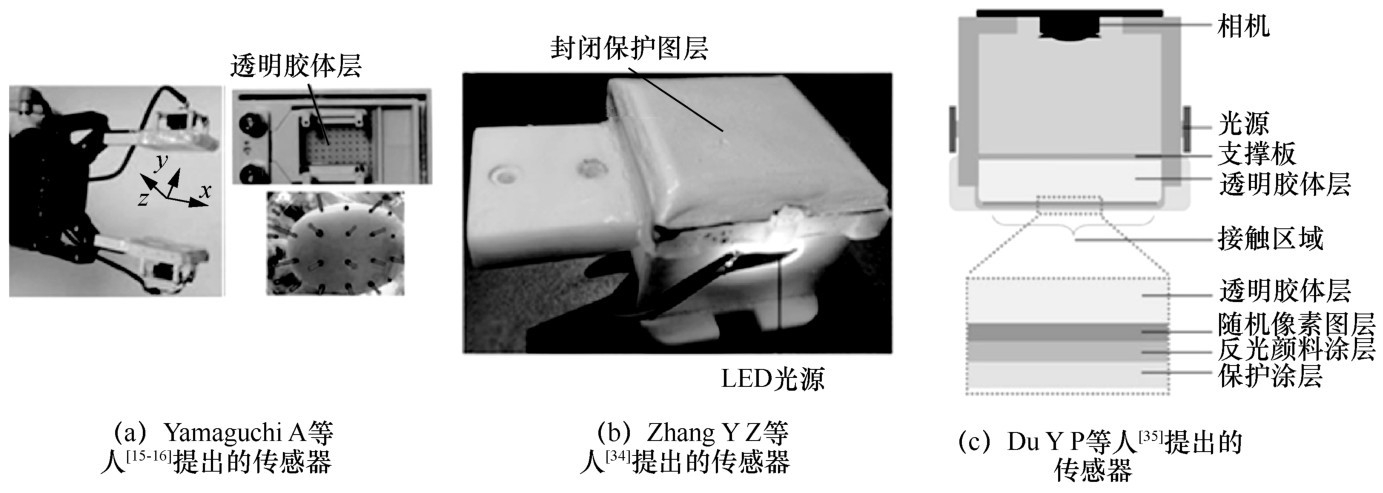
| Sf.& D’ A.[ | 手掌 | 稠密标记点 | 单色 | 单目 | 无 | 有限元 | 无 |
| FingerVision[ | 指尖 | 阵列标记点 | 无 | 单目 | 无 | 无 | 接触模型 |
| DelTact[ | 指尖 | 稠密像素图层 | 单色 | 单目 | 光流估计 | 有限元 | 神经网络 |

"

"
| [6] | LI Q , KROEMER O , SU Z ,et al. A review of tactile information:perception and action through touch[J]. IEEE Transactions on Robotics, 2020,36(6): 1619-1634. |
| [7] | CHI C , SUN X G , XUE N ,et al. Recent progress in technologies for tactile sensors[J]. Sensors (Basel,Switzerland), 2018,18(4): 948. |
| [8] | ABAD A C , RANASINGHE A . Visuotactile sensors with emphasis on GelSight sensor:a review[J]. IEEE Sensors Journal, 2020,20(14): 7628-7638. |
| [9] | YUAN W Z , DONG S Y , ADELSON E H . GelSight:high-resolution robot tactile sensors for estimating geometry and force[J]. Sensors (Basel,Switzerland), 2017,17(12): 2762. |
| [10] | DONG S Y , YUAN W Z , ADELSON E H . Improved GelSight tactile sensor for measuring geometry and slip[C]// Proceedings of 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2017: 137-144. |
| [11] | DONLON E , DONG S Y , LIU M ,et al. GelSlim:a high-resolution,compact,robust,and calibrated tactile-sensing finger[C]// Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2018: 1927-1934. |
| [12] | TAYLOR I , DONG S Y , RODRIGUEZ A . GelSlim3.0:high-resolution measurement of shape,force and slip in a compact tactile-sensing finger[J]. arXiv preprint,2021,arXiv:2103.12269. |
| [13] | WARD-CHERRIER B , PESTELL N , CRAMPHORN L ,et al. The TacTip family:soft optical tactile sensors with 3D-printed biomimetic morphologies[J]. Soft Robotics, 2018,5(2): 216-227. |
| [1] | MYERS D . Sensation and perception.Psychology[M]. New York: Worth, 2010. |
| [2] | ANSHEL J R . Visual ergonomics in the workplace[J]. AAOHN Journal, 2007,55(10): 414-420. |
| [14] | ALSPACH A , HASHIMOTO K , KUPPUSWAMY N ,et al. Soft-bubble:a highly compliant dense geometry tactile sensor for robot manipulation[C]// Proceedings of 2019 2nd IEEE International Conference on Soft Robotics. Piscataway:IEEE Press, 2019: 597-604. |
| [15] | YAMAGUCHI A , ATKESON C G . Combining finger vision and optical tactile sensing:reducing and handling errors while cutting vegetables[C]// Proceedings of 2016 IEEE-RAS 16th International Conference on Humanoid Robots. Piscataway:IEEE Press, 2016: 1045-1051. |
| [3] | RANASINGHE A , SORNKARN N , DASGUPTA P ,et al. Salient feature of haptic-based guidance of people in low visibility environments using hard reins[J]. IEEE Transactions on Cybernetics, 2016,46(2): 568-579. |
| [4] | AKHTAR N , MIAN A . Threat of adversarial attacks on deep learning in computer vision:a survey[J]. IEEE Access, 2018,6: 14410-14430. |
| [16] | YAMAGUCHI A , ATKESON C G . Implementing tactile behaviors using FingerVision[C]// Proceedings of 2017 IEEE-RAS 17th International Conference on Humanoid Robotics. Piscataway:IEEE Press, 2017: 241-248. |
| [17] | LAMBETA M , CHOU P W , TIAN S ,et al. DIGIT:a novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation[J]. IEEE Robotics and Automation Letters, 2020,5(3): 3838-3845. |
| [18] | WANG S X , SHE Y , ROMERO B ,et al. GelSight Wedge:measuring high-resolution 3D contact geometry with a compact robot finger[C]// Proceedings of 2021 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 2021: 6468-6475. |
| [19] | DO W K , KENNEDY III M . DenseTact:optical tactile sensor for dense shape reconstruction[J]. arXiv preprint,2022,arXiv:2201.01367. |
| [20] | GOMES D F , LIN Z L , LUO S . GelTip:a finger-shaped optical tactile sensor for robotic manipulation[C]// Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2021: 9903-9909. |
| [21] | SUN H , KUCHENBECKER K J , MARTIUS G . A soft thumb-sized vision-based sensor with accurate all-round force perception[J]. Nature Machine Intelligence, 2022,4(2): 135-145. |
| [22] | KUPPUSWAMY N , ALSPACH A , UTTAMCHANDANI A ,et al. Soft-bubble grippers for robust and perceptive manipulation[C]// Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2020: 9917-9924. |
| [23] | PADMANABHA A , EBERT F , TIAN S ,et al. OmniTact:a multi-directional high-resolution touch sensor[C]// Proceedings of 2020 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 2020: 618-624. |
| [24] | ZHANG T , CONG Y , LI X M ,et al. Robot tactile sensing:vision based tactile sensor for force perception[C]// Proceedings of 2018 IEEE 8th Annual International Conference on CYBER Technology in Automation,Control,and Intelligent Systems. Piscataway:IEEE Press, 2018: 1360-1365. |
| [25] | CUI S W , WANG R , HU J Y ,et al. In-hand object localization using a novel high-resolution visuotactile sensor[J]. IEEE Transactions on Industrial Electronics, 2022,69(6): 6015-6025. |
| [26] | KAKANI V , CUI X N , MA M J ,et al. Vision-based tactile sensor mechanism for the estimation of contact position and force distribution using deep learning[J]. Sensors (Basel,Switzerland), 2021,21(5): 1920. |
| [27] | ZHANG L W , WANG Y , JIANG Y . Tac3D:a novel vision-based tactile sensor for measuring forces distribution and estimating friction coefficient distribution[J]. arXiv preprint,2022,arXiv:2202.06211. |
| [28] | LEPORA N F . Soft biomimetic optical tactile sensing with the TacTip:a review[J]. IEEE Sensors Journal, 2021,21(19): 21131-21143. |
| [29] | VLACK K , MIZOTA T , KAWAKAMI N ,et al. GelForce:a vision-based traction field computer interface[C]// Proceedings of CHI’05 Extended Abstracts on Human Factors in Computing Systems. New York:ACM Press, 2005: 1154-1155. |
| [30] | SATO K , KAMIYAMA K , KAWAKAMI N ,et al. Finger-shaped GelForce:sensor for measuring surface traction fields for robotic hand[J]. IEEE Transactions on Haptics, 2010,3(1): 37-47. |
| [31] | SFERRAZZA C , D'ANDREA R , . Design,motivation and evaluation of a full-resolution optical tactile sensor[J]. Sensors (Basel,Switzerland), 2019,19(4): 928. |
| [32] | SFERRAZZA C , WAHLSTEN A , TRUEEB C ,et al. Ground truth force distribution for learning-based tactile sensing:a finite element approach[J]. IEEE Access, 2019,7: 173438-173449. |
| [33] | SFERRAZZA C , D’ANDREA R , . Sim-to-real for high-resolution optical tactile sensing:from images to 3D contact force distributions[J]. arXiv preprint,2020,arXiv:2012.11295. |
| [34] | ZHANG Y Z , YUAN W H , KAN Z C ,et al. Towards learning to detect and predict contact events on vision-based tactile sensors[J]. arXiv preprint,2019,arXiv:1910.03973. |
| [35] | DU Y P , ZHANG G L , ZHANG Y Z ,et al. High-resolution 3-dimensional contact deformation tracking for FingerVision sensor with dense random color pattern[J]. IEEE Robotics and Automation Letters, 2021,6(2): 2147-2154. |
| [36] | ZHANG G L , DU Y P , YU H Y ,et al. DelTact:a vision-based tactile sensor using dense color pattern[J]. arXiv preprint,2022,arXiv:2202.02179. |
| [37] | JOHNSON M K , ADELSON E H . Retrographic sensing for the measurement of surface texture and shape[C]// Proceedings of 2009 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway:IEEE Press, 2009: 1070-1077. |
| [38] | ROMERO B , VEIGA F , ADELSON E . Soft,round,high resolution tactile fingertip sensors for dexterous robotic manipulation[C]// Proceedings of 2020 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 2020: 4796-4802. |
| [39] | CUI S W , WANG R , HU J Y ,et al. Self-supervised contact geometry learning by GelStereo visuotactile sensing[J]. IEEE Transactions on Instrumentation and Measurement, 2022,71: 1-9. |
| [40] | KAMIYAMA K , KAJIMOTO H , KAWAKAMI N ,et al. Evaluation of a vision-based tactile sensor[C]// Proceedings of IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 2004: 1542-1547. |
| [41] | MA D L , DONLON E , DONG S Y ,et al. Dense tactile force estimation using GelSlim and inverse FEM[C]// Proceedings of 2019 International Conference on Robotics and Automation. Piscataway:IEEE Press, 2019: 5418-5424. |
| [42] | ZHANG Y Z , KAN Z C , YANG Y ,et al. Effective estimation of contact force and torque for vision-based tactile sensors with Helmholtz-Hodge decomposition[J]. IEEE Robotics and Automation Letters, 2019,4(4): 4094-4101. |
| [43] | DONG S Y , MA D L , DONLON E ,et al. Maintaining grasps within slipping bounds by monitoring incipient slip[C]// Proceedings of 2019 International Conference on Robotics and Automation. Piscataway:IEEE Press, 2019: 3818-3824. |
| [44] | SUI R M , ZHANG L W , LI T M ,et al. Incipient slip detection method with vision-based tactile sensor based on distribution force and deformation[J]. IEEE Sensors Journal, 2021,21(22): 25973-25985. |
| [45] | LI J H , DONG S Y , ADELSON E . Slip detection with combined tactile and visual information[C]// Proceedings of 2018 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 2018: 7772-7777. |
| [46] | ZHANG Y Z , KAN Z C , TSE Y A ,et al. Fingervision tactile sensor design and slip detection using convolutional LSTM network[J]. arXiv preprint,2018,arXiv:1810.02653. |
| [47] | JAMES J W , LEPORA N F . Slip detection for grasp stabilization with a multifingered tactile robot hand[J]. IEEE Transactions on Robotics, 2021,37(2): 506-519. |
| [48] | ABAD A C , REID D , RANASINGHE A . HaptiTemp:a next-generation thermosensitive GelSight-like visuotactile sensor[J]. IEEE Sensors Journal, 2022,22(3): 2722-2734. |
| [49] | YUAN W Z , SRINIVASAN M A , ADELSON E H . Estimating object hardness with a GelSight touch sensor[C]// Proceedings of 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2016: 208-215. |
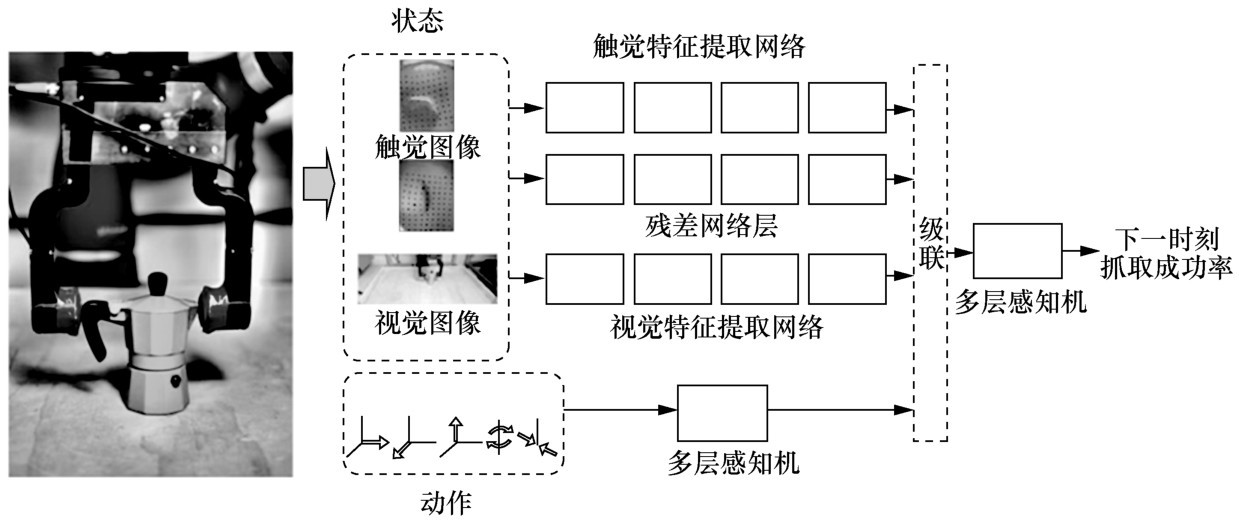
| [50] | CALANDRA R , OWENS A , UPADHYAYA M ,et al. The feeling of success:does touch sensing help predict grasp outcomes?[J]. arXiv preprint,2017,arXiv:1710.05512. |
| [51] | CALANDRA R , OWENS A , JAYARAMAN D ,et al. More than a feeling:learning to grasp and regrasp using vision and touch[J]. IEEE Robotics and Automation Letters, 2018,3(4): 3300-3307. |
| [52] | HOGAN F R , BAUZA M , CANAL O ,et al. Tactile regrasp:grasp adjustments via simulated tactile transformations[C]// Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2018: 2963-2970. |
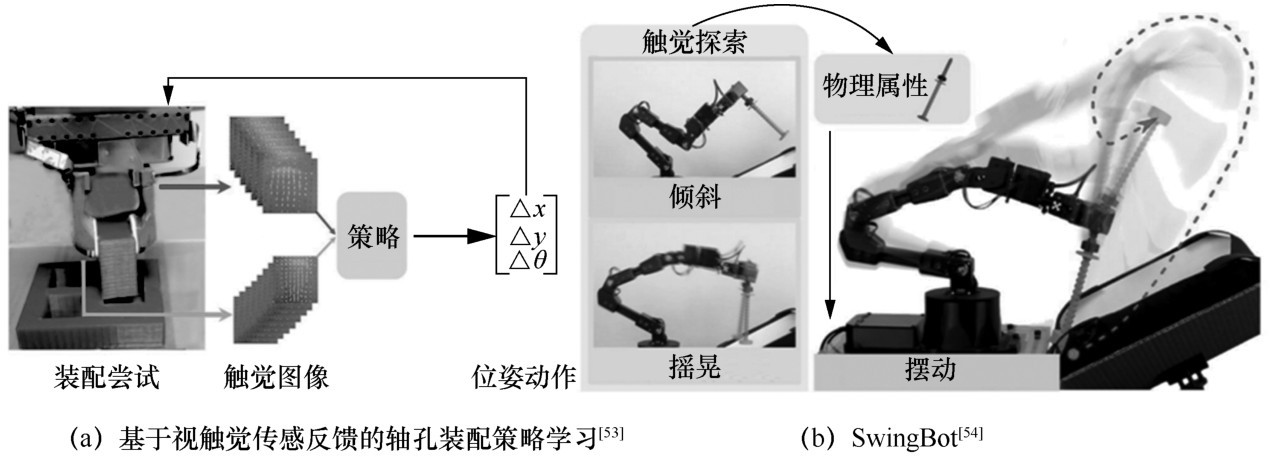
| [53] | DONG S Y , JHA D K , ROMERES D ,et al. Tactile-RL for insertion:generalization to objects of unknown geometry[C]// Proceedings of 2021 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 2021: 6437-6443. |
| [54] | WANG C , WANG S X , ROMERO B ,et al. SwingBot:learning physical features from in-hand tactile exploration for dynamic swing-up manipulation[C]// Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2021: 5633-5640. |
| [55] | ANZAI T , TAKAHASHI K . Deep gated multi-modal learning:in-hand object pose changes estimation using tactile and image data[C]// Proceedings of 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2021: 9361-9368. |
| [56] | LI R , PLATT R , YUAN W Z ,et al. Localization and manipulation of small parts using GelSight tactile sensing[C]// Proceedings of 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2014: 3988-3993. |
| [57] | BAUZA M , VALLS E , LIM B ,et al. Tactile object pose estimation from the first touch with geometric contact rendering[J]. arXiv preprint,2020,arXiv:2012.05205. |
| [58] | BAUZA M , CANAL O , RODRIGUEZ A . Tactile mapping and localization from high-resolution tactile imprints[C]// Proceedings of 2019 International Conference on Robotics and Automation. Piscataway:IEEE Press, 2019: 3811-3817. |
| [59] | LEPORA N F , LLOYD J . Optimal deep learning for robot touch:training accurate pose models of 3D surfaces and edges[J]. IEEE Robotics & Automation Magazine, 2020,27(2): 66-77. |
| [60] | SHE Y , WANG S X , DONG S Y ,et al. Cable manipulation with a tactile-reactive gripper[J]. The International Journal of Robotics Research, 2021,40(12/13/14): 1385-1401. |
| [61] | KIM S , RODRIGUEZ A . Active extrinsic contact sensing:application to general peg-in-hole insertion[J]. arXiv preprint,2021,arXiv:2110.03555. |
| [62] | LAMBETA M , XU H Z , XU J W ,et al. PyTouch:a machine learning library for touch processing[C]// Proceedings of 2021 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 2021: 13208-13214. |
| [63] | SORENSEN S , KOLAGUNDA A , SAPONARO P ,et al. Refractive stereo ray tracing for reconstructing underwater structures[C]// Proceedings of 2015 IEEE International Conference on Image Processing. Piscataway:IEEE Press, 2015: 1712-1716. |
| [5] | BILLARD A , KRAGIC D . Trends and challenges in robot manipulation[J]. Science, 2019,364(6446): eaat8414. |
| [64] | FISHEL J A , LOEB G E . Sensing tactile microvibrations with the BioTac—comparison with human sensitivity[C]// Proceedings of 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. Piscataway:IEEE Press, 2012: 1122-1127. |
| [1] | Xiang CAO, Changyin SUN. UUV mission re-planning based on threat assessment of uncertain events [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 493-502. |
| [2] | Jiaxin ZHANG, Senlin ZHANG, Meiqin LIU, Shanling DONG, Ronghao ZHENG. Multi-AUV cooperative localization in adaptive sampling for marine environmental monitoring [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 503-512. |
| [3] | Yinghao CAI, Hua YANG, Xuan AN, Wenshuo WANG, Yidong DU, Jiatao ZHANG, Zhigang WANG. Study on NeuroSymbolic learning and its applications [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 560-570. |
| [4] | Chao ZHAO, Jie XU, Xingyu CHEN, Kuizhi MEI, Xuguang LAN. A review of continual learning for robotics [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(3): 308-323. |
| [5] | De XU, Fangbo QIN. Research development on automated robotic peg-in-hole assembly [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(2): 200-211. |
| [6] | Yueguang GE, Shaolin ZHANG, Yinghao CAI, Tao LU, Dayong WEN, Haitao WANG, Shuo WANG. A survey on applications of ontology knowledge representation in robotics [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(2): 212-222. |
| [7] | Jingyi HU, Shaowei CUI, Chaofan ZHANG, Boyue ZHANG, Shuo WANG. 3D edge reconstruction method based on tactile sensing and servo [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(2): 233-245. |
| [8] | Lu DONG, Ailing XIONG. Path planning for unmanned surface vehicle in complex dynamic environment based on improved RRT*-Smart [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(2): 264-276. |
| [9] | Teng WANG, Jing PAN, Lu DONG, Changyin SUN. Key technologies and applications of intelligent guiding robots for epidemic prevention [J]. Chinese Journal of Intelligent Science and Technology, 2021, 3(2): 187-194. |
| [10] | Rizhong WANG, Huiping LI, Di CUI, Demin XU. Depth control of autonomous underwater vehicle using deep reinforcement learning [J]. Chinese Journal of Intelligent Science and Technology, 2020, 2(4): 354-360. |
| [11] | Huiqiao FU, Kaiqiang TANG, Guizhou DENG, Xinpeng WANG, Chunlin CHEN. Motion planning for hexapod robot using deep reinforcement learning [J]. Chinese Journal of Intelligent Science and Technology, 2020, 2(4): 361-371. |
| [12] | Dawei WANG,Zhuo WANG,Peng WANG,Zhigang WANG,Haitao WANG. Cloud native robot system based on edge computing [J]. Chinese Journal of Intelligent Science and Technology, 2020, 2(3): 275-283. |
| [13] | Haijun FU,Shichao CHEN,Yilun LIN,Gang XIONG,Bin HU. Research and validation of human-in-the-loop hybrid-augmented intelligence in Sawyer [J]. Chinese Journal of Intelligent Science and Technology, 2019, 1(3): 280-286. |
| [14] | Xiang ZHANG,Hongwei LIU,Zhuoqun LIU,Zhenguo YAN,Xiaoqian CHEN,Yiyong HUANG. Dynamical modeling and intelligent control of space soft manipulator [J]. Chinese Journal of Intelligent Science and Technology, 2019, 1(1): 52-61. |
| [15] | Yajun ZHENG,Lei XUE,Lu DONG,Qingling WANG. Formation control of mobile robots with UWB localization technology [J]. Chinese Journal of Intelligent Science and Technology, 2019, 1(1): 83-87. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
|
||