


Chinese Journal of Intelligent Science and Technology ›› 2023, Vol. 5 ›› Issue (4): 543-552.doi: 10.11959/j.issn.2096-6652.202340
• Papers and Reports • Previous Articles
Weibin ZHENG1, Guofu LIAN1( ), Xueming ZHANG1, Fang GUO2
), Xueming ZHANG1, Fang GUO2
Received:2022-12-07
Revised:2023-06-02
Online:2023-12-15
Published:2023-12-15
Contact:
Guofu LIAN
E-mail:gflian@mail.ustc.edu.cn
Supported by:CLC Number:
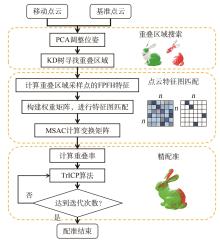
Weibin ZHENG, Guofu LIAN, Xueming ZHANG, et al. Point cloud registration method based on principal component analysis and feature map matching[J]. Chinese Journal of Intelligent Science and Technology, 2023, 5(4): 543-552.
"

"

"
"

"

"
"
| 模型 | 重叠率 | 点数/个 | 质心位置 |
|---|---|---|---|
| Bunny | 31% | Q: 40 097 | 0.0104,0.0984,0.0606 |
| P: 30 379 | -0.0064,0.1027,0.0064 | ||
| Dragon | 44% | Q: 41 841 | -0.0044,0.1157,0.0058 |
| P: 22 092 | 0.0045,0.1145,0.0114 | ||
| 7-Scenes 室内场景 | 58% | Q: 291 605 | 0.1772,-0.3775,2.0563 |
| P: 268 376 | 0.5535,-0.1114,2.0154 |

"


"


"
"
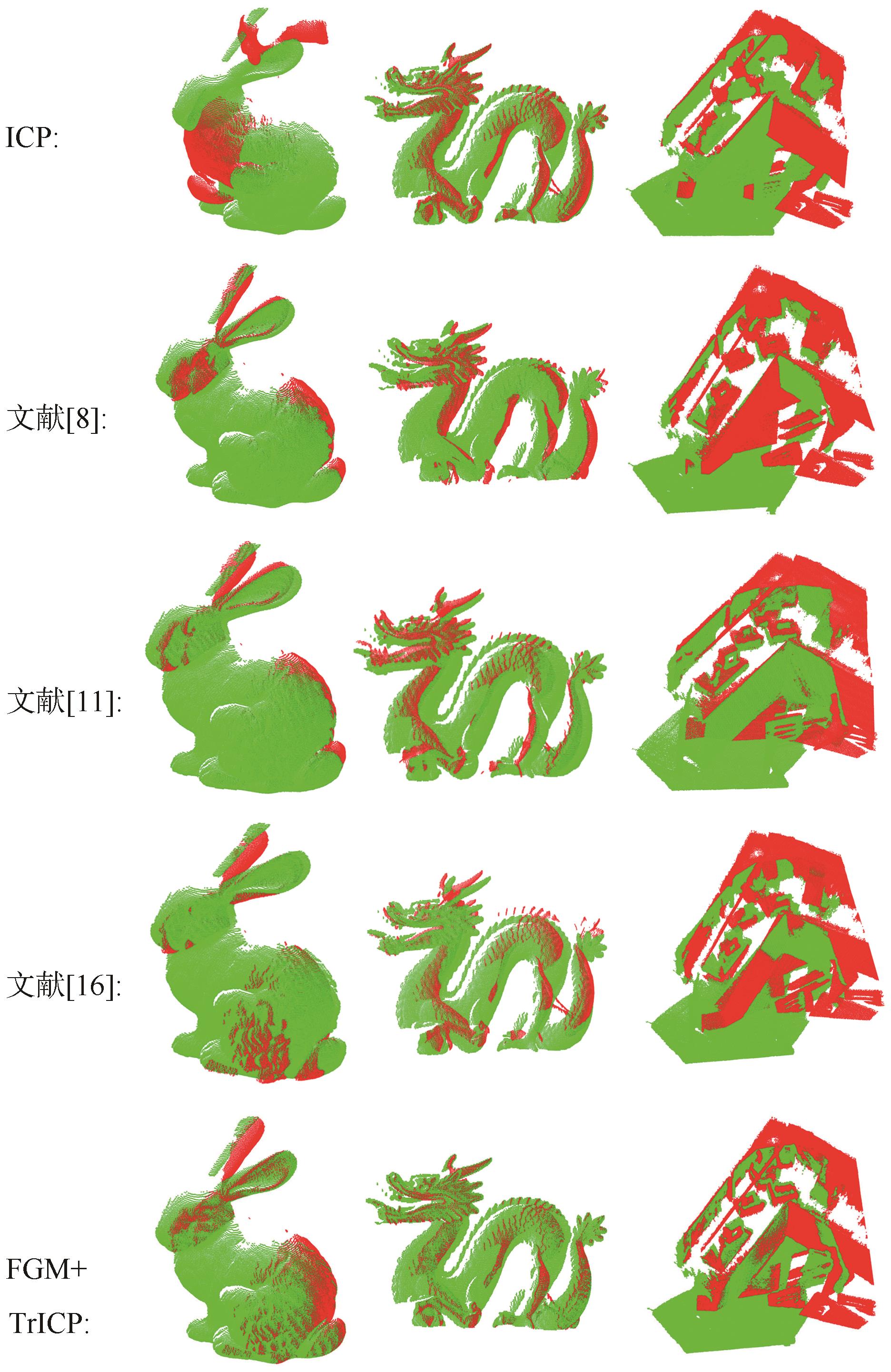
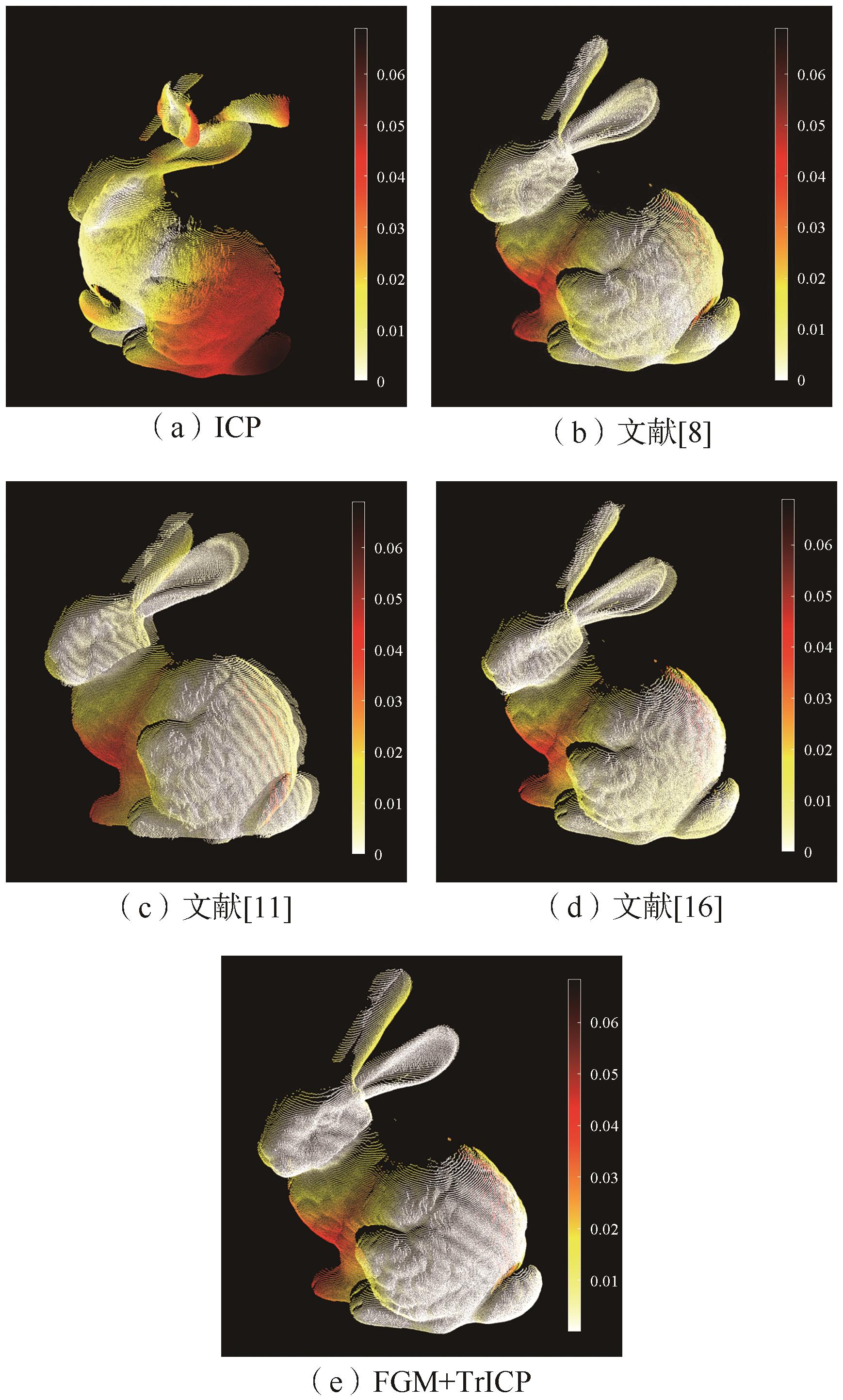
| 点云数据 | 配准算法 | 配准误差MSE | 时间/s |
|---|---|---|---|
| Bunny | ICP | 32.1 | |
| 文献[ | 25.4 | ||
| 文献[ | 19.2 | ||
| 文献[ | 17.9 | ||
| FGM+TrICP | 15.2 | ||
| Dragon | ICP | 28.7 | |
| 文献[ | 22.1 | ||
| 文献[ | 18.9 | ||
| 文献[ | 13.5 | ||
| FGM+TrICP | 14.3 | ||
| 7-Scenes室内场景 | ICP | 42.7 | |
| 文献[ | 32.7 | ||
| 文献[ | 25.1 | ||
| 文献[ | 22.0 | ||
| FGM+TrICP | 19.8 |

"

"
"
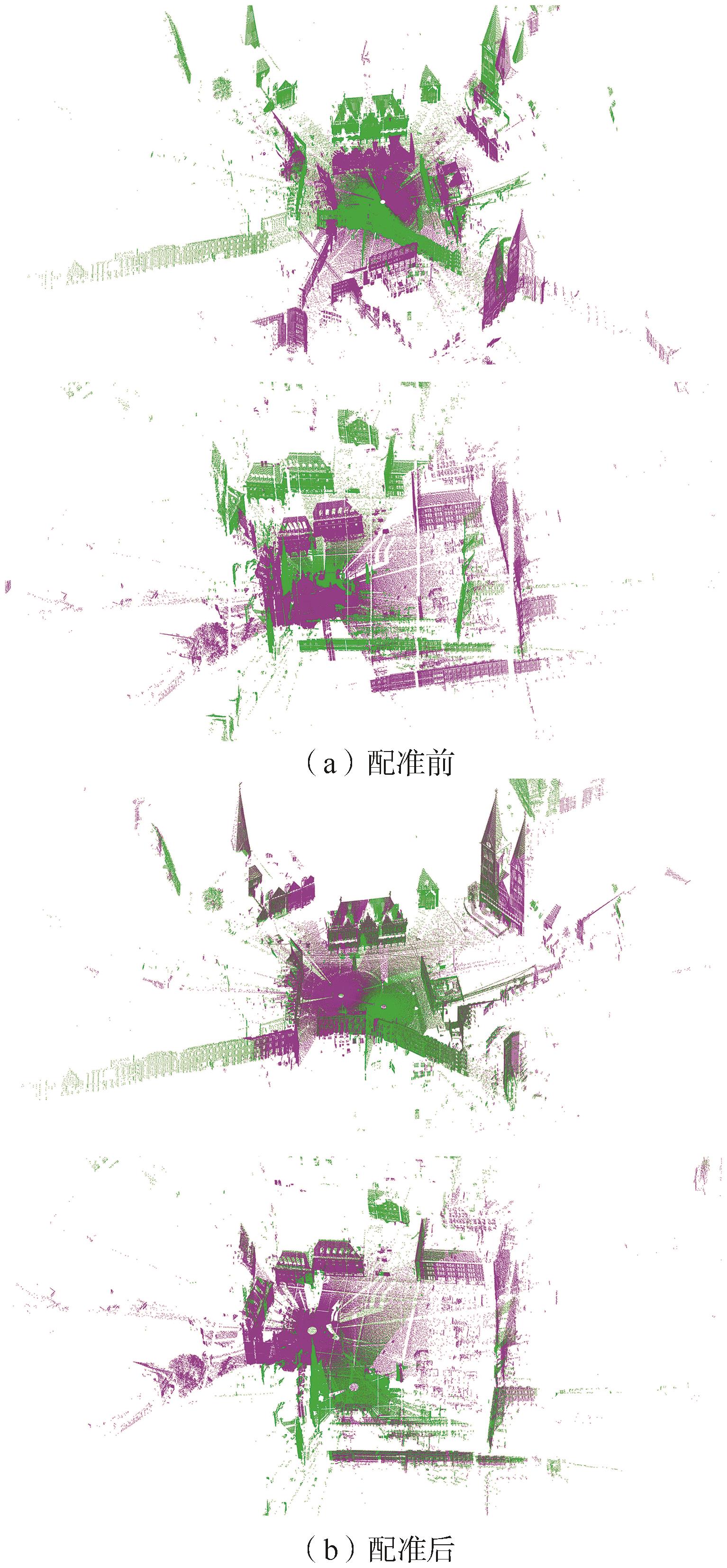
| 点云数据 | 配准算法 | 配准误差MSE | 时间/s |
|---|---|---|---|
| Bremen city | ICP | 7.208 | 185.7 |
| 文献[ | 1.055 | 115.6 | |
| 文献[ | 0.566 | 75.3 | |
| 文献[ | 1.489 | 68.6 | |
| FGM+TrICP | 0.102 | 70.2 | |
| Wue city | ICP | 12.054 | 192.3 |
| 文献[ | 1.244 | 105.7 | |
| 文献[ | 0.987 | 77.9 | |
| 文献[ | 1.442 | 69.1 | |
| FGM+TrICP | 0.635 | 67.5 |

"


"


"
"
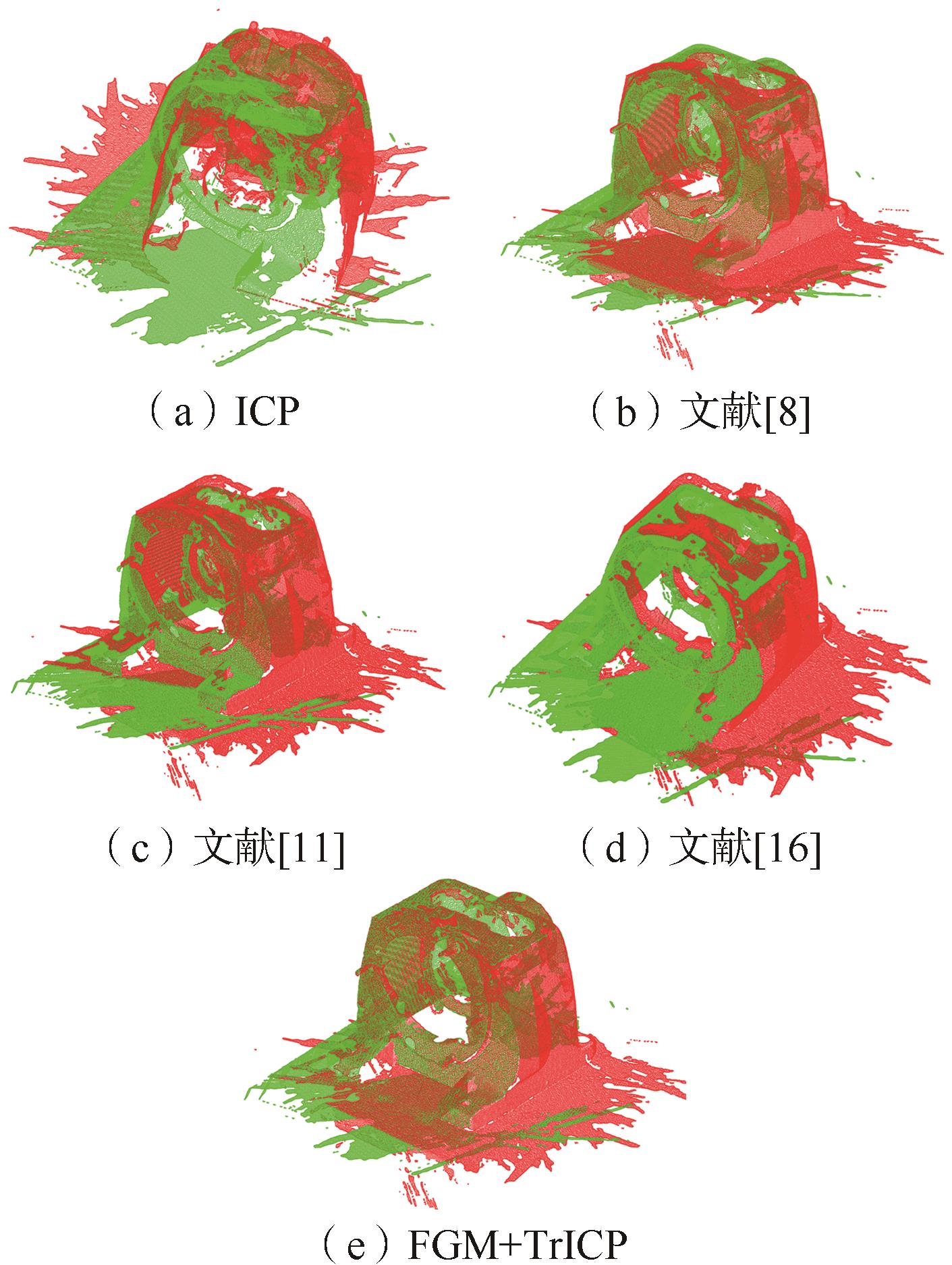
| 点云数据 | 配准算法 | 配准误差MSE | 时间/s |
|---|---|---|---|
| 齿轮箱体 | ICP | 39.8 | |
| 文献[ | 32.7 | ||
| 文献[ | 21.4 | ||
| 文献[ | 16.5 | ||
| FGM+TrICP | 17.2 |
| 1 | 李博洋, 刘思健, 崔明月, 等. 基于最小回环检测的多车协同SLAM框架[J]. 电子学报, 2021, 49(11): 2241-2250. |
| LI B Y, LIU S J, CUI M Y, et al. Multi-vehicle collaborative SLAM framework for minimum loop detection[J]. Acta Electronica Sinica, 2021, 49(11): 2241-2250. | |
| 2 | DONG Z, LIANG F X, YANG B S, et al. Registration of large-scale terrestrial laser scanner point clouds: a review and benchmark[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 163: 327-342. |
| 3 | BESL P J, MCKAY N D. Method for registration of 3-D shapes[C]//Proceedings of SPIE 1611, Sensor Fusion IV: Control Paradigms and Data Structures. Washington: SPIE, 1992, 1611: 586-606. |
| 4 | ZHONG L S, YING J, YANG H M, et al. Triple screening point cloud registration method based on image and geometric features[J]. Optik, 2021, 246: 167763. |
| 5 | 张旭春, 周洪军, 郑津津, 等. 基于多尺度特征及点距离约束的点云配准[J]. 激光与光电子学进展, 2021, 58(24): 325-333. |
| ZHANG X C, ZHOU H J, ZHENG J J, et al. Point cloud registration based on multi-scale features and point distance constraints[J]. Laser & Optoelectronics Progress, 2021, 58(24): 325-333. | |
| 6 | XU G X, PANG Y J, BAI Z X, et al. A fast point clouds registration algorithm for laser scanners[J]. Applied Sciences, 2021, 11(8): 3426. |
| 7 | ZAGANIDIS A, MAGNUSSON M, DUCKETT T, et al. Semantic-assisted 3D normal distributions transform for scan registration in environments with limited structure[C]//Proceedings of 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2017: 4064-4069. |
| 8 | 荆路, 武斌, 李先帅. 基于SAC-IA和NDT融合的点云配准方法[J]. 大地测量与地球动力学, 2021, 41(4): 378-381. |
| JING L, WU B, LI X S. Point cloud registration method based on SAC-IA and NDT fusion[J]. Journal of Geodesy and Geodynamics, 2021, 41(4): 378-381. | |
| 9 | 杜辉, 郑长亮, 苗春雨, 等. 一种动态特征匹配的部分重叠点云配准方法[J]. 电信科学, 2021, 37(4): 97-107. |
| DU H, ZHENG C L, MIAO C Y, et al. A partial overlapping point cloud registration method based on dynamic feature matching[J]. Telecommunications Science, 2021, 37(4): 97-107. | |
| 10 | 李鑫, 莫思特, 黄华, 等. 自动计算重叠度的多源点云配准方法[J]. 红外与激光工程, 2021, 50(12): 260-268. |
| LI X, MO S T, HUANG H, et al. Multi-source point cloud registration method for automatically calculating overlap degree[J]. Infrared and Laser Engineering, 2021, 50(12): 260-268. | |
| 11 | LI J, QIAN F, CHEN X F. Point cloud registration algorithm based on overlapping region extraction[J]. Journal of Physics: Conference Series, 2020, 1634(1): 012012. |
| 12 | 张元, 李晓燕, 韩燮. 一种低重叠率的三维点云配准方法[J]. 激光与光电子学进展, 2021, 58(8):162-171. |
| ZHANG Y, LI X, HAN X. Three-dimensional point cloud registration method with low overlap rate[J]. Laser & Optoelectronics Progress, 2021, 58(8):162-171. | |
| 13 | POIESI F, BOSCAINI D. Learning general and distinctive 3D local deep descriptors for point cloud registration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(3): 3979-3985. |
| 14 | WANG Y, SOLOMON J. Deep closest point: learning representations for point cloud registration[C]//Proceedings of 2019 IEEE/CVF International Conference on Computer Vision (ICCV). Piscataway: IEEE Press, 2020: 3522-3531. |
| 15 | WU Z R, SONG S R, KHOSLA A, et al. 3D ShapeNets: a deep representation for volumetric shapes[C]//Proceedings of 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2015: 1912-1920. |
| 16 | FU K X, LIU S L, LUO X Y, et al. Robust point cloud registration framework based on deep graph matching[C]//Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2021: 8889-8898. |
| 17 | HUANG S Y, GOJCIC Z, USVYATSOV M, et al. PREDATOR: registration of 3D point clouds with low overlap[C]//Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2021: 4265-4274. |
| 18 | CHENG D Y, ZHAO D J, ZHANG J C, et al. PCA-based denoising algorithm for outdoor lidar point cloud data[J]. Sensors, 2021, 21(11): 3703. |
| 19 | 王来强, 包静. 附加主方向判定的PCA点云数据初始配准算法[J]. 测绘地理信息, 2021, 46(6):59-62, 66. |
| WANG L Q, BAO J. Initial registration algorithm for PCA point cloud data with additional main direction decision[J]. Journal of Geomatics, 2021, 46(6): 59-62, 66. | |
| 20 | LIU J, ZHU J W, YANG J L, et al. Three-dimensional point cloud registration based on ICP algorithm employing K-D tree optimization[C]//Proceedings of Eighth International Conference on Digital Image Processing (ICDIP 2016). Washington: SPIE, 2016, 10033: 872-876. |
| 21 | RUSU R B, BLODOW N, BEETZ M. Fast point feature histograms (FPFH) for 3D registration[C]//Proceedings of 2009 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2009: 3212-3217. |
| 22 | CHETVERIKOV D, SVIRKO D, STEPANOV D, et al. The trimmed iterative closest point algorithm[C]//Proceedings of 2002 International Conference on Pattern Recognition. Piscataway: IEEE Press, 2002: 545-548. |
| 23 | LI J Y, HU Q W, AI M Y. Point cloud registration based on one-point RANSAC and scale-annealing biweight estimation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(11): 9716-9729. |
| [1] | Wencheng CUI, Keli WANG, Hong SHAO. Abnormal cell segmentation for lung pathological image based on denseblock and attention mechanism [J]. Chinese Journal of Intelligent Science and Technology, 2023, 5(4): 525-534. |
| [2] | Wei TANG, Xiao TAN, Yu SUN, Jiapeng YAN, Guangrui YAN. Research on path planning of material transmission platform based on A* and dynamic window method [J]. Chinese Journal of Intelligent Science and Technology, 2023, 5(4): 515-524. |
| [3] | Zhenqi FANG, Xue LI, Hong MO. Diagnostic of breast tumors based on improved EfficientNet [J]. Chinese Journal of Intelligent Science and Technology, 2023, 5(4): 505-514. |
| [4] | Cong JIN, Jie WANG, Zichun GUO, Jing WANG. Lipsynthesis incorporating audio-visual synchronisation [J]. Chinese Journal of Intelligent Science and Technology, 2023, 5(3): 397-405. |
| [5] | Fengtao XIANG, Jiongming SU, Xueqiang Gu, Wanpeng ZHANG. Research on the spread and countermeasures of COVID-19 using agent-based modeling [J]. Chinese Journal of Intelligent Science and Technology, 2023, 5(1): 51-57. |
| [6] | Zhouyu GU, Yuecheng YU, Tiantian Zhe. Rapider-YOLOX: lightweight object detection network with high precision [J]. Chinese Journal of Intelligent Science and Technology, 2023, 5(1): 92-103. |
| [7] | Xiaofeng CONG, Jie GUI, Jun ZHANG. Underwater image enhancement network based on visual Transformer with multiple loss functions fusion [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 522-532. |
| [8] | Hang YU, Yanwei FU, Boyan JIANG, Xiangyang XUE. A survey of image-based few-shot 3D reconstruction [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 544-559. |
| [9] | Yan CHEN, Xueqin LUO, Wei LIANG, Yongfang XIE. Depression recognition based on emotional information fused with attentional mechanism [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 600-609. |
| [10] | Yongqiang ZHANG, Meilin SONG, Tianhu LIU, Menghua MAN. Research on three frame difference gesture recognition method based on mixed bone features [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 592-599. |
| [11] | Chao GUO, Yue LU, Xiao WANG, Da YI, Xiao WANG, Fei-Yue WANG. Architecture and key techniques of parallel creation through the fusion of human-cyber-physical intelligence in CPSS [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(3): 344-354. |
| [12] | Zhou YU, Jing BI, Haitao YUAN. A path planning method for complex naval battle field based on an improved DQN algorithm [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(3): 418-425. |
| [13] | Renwu LI, Lingxiao ZHANG, Lin GAO, Chunpeng LI, Hao JIANG. Category-level object pose estimation from depth point cloud [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(2): 246-254. |
| [14] | Mingyang CHEN, Wen ZHANG, Xiangnan CHEN, Hongting ZHOU, Huajun CHEN. Collective knowledge graph: meta knowledge transfer and federated graph reasoning [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(1): 55-64. |
| [15] | Yue YU, Xin LIU, Fangqing JIANG, Han ZHANG, Hui WANG, Wei ZENG. Exploration of the continual learning ability that supports the application ecological evolution of the large-scale pretraining Peng Cheng series open source models [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(1): 97-108. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
|
||