1 引言
四旋翼飞行器通过电机带动螺旋桨旋转,能够完成垂直起降、定点悬停等行为动作,且其操作简易,因此备受青睐[1 ,2 ,3 ,4 ] 。但是,四旋翼飞行器的强非线性、强耦合性和欠驱动性,使得其控制方法偏难、控制模型复杂,因此一直是国内外学者研究的重点和难点[5 ] 。
传统的PID(比例(proportion)、积分(integral)、微分(differential))控制算法原理简单,但是控制参数很难随着环境的变化进行自我调节[6 ,7 ,8 ,9 ,10 ] 。文献[11 ]提出利用神经网络(neural networks)的自学习能力对PID控制参数进行实时优化,但是该方法的实时性较差,这是因为控制参数的自学习过程需要时间。文献[12 ]在文献[11 ]的基础上,加入了自适应环节来提高系统的收敛速度,解决了实时性差的问题。但是,加入神经网络辅助的PID控制算法复杂度较高,在工程上难以实现。
反步法在四旋翼飞行器系统控制设计中越来越多地受到重视,但是存在虚拟控制量表达形式复杂,以及控制算法设计复杂和物理实现困难的问题[13 ,14 ,15 ,16 ] 。本文提出了一种基于积分反步法(integral back- stepping algorithm)的四旋翼飞行器控制律设计方法。该方法先对四旋翼飞行器进行数学建模,并利用基于李雅普诺夫(Lyapunov)稳定性理论的反步法实现了飞行器位置和姿态的有效跟踪控制,同时在对姿态控制的反步法设计中加入了积分项,并通过设置适当的积分项常数来简化控制器模型。仿真实验验证,该控制器能够无误差地实现姿态跟踪、定点到达和轨迹跟踪。
2 四旋翼飞行器模型的简化
{ m x ¨ = ( cos ϕ sin θ cos ψ + sin ϕ sin ψ ) u 1 m y ¨ = ( cos ϕ sin θ sin ψ − sin ϕ cos ψ ) u 1 m z ¨ = ( cos ϕ cos θ ) u 1 − m g J x ϕ ¨ = l u 2 + θ ˙ ψ ˙ ( J y − J z ) J y θ ¨ = l u 3 + ϕ ˙ ψ ˙ ( J z − J x ) J z ψ ¨ = l u 4 + ϕ ˙ θ ˙ ( J x − J y ) ( 1 )
其中,(x,y,z)和(φ,θ,ψ)分别为机体的位置坐标和姿态信息,m为机体的质量,l 为桨叶中心到机体中心的距离,J x 、Jy 和J z 分别为机体围绕x、y、z轴旋转的转动惯量,ui (i=1,2,3,4)为模型控制输入。
{ x 1 = ϕ x 2 = ϕ ˙ = x ˙ 1 x 3 = θ x 4 = θ ˙ = x ˙ 3 x 5 = ψ x 6 = ψ ˙ = x ˙ 5 x 7 = z x 8 = z ˙ = x ˙ 7 x 9 = x x 10 = x ˙ = x ˙ 9 x 11 = y x 12 = y ˙ = x ˙ 11 ( 2 )
则可将式(1)拆分成针对姿态控制的转动子系统S1 和针对位置控制的平动子系统S2 ,即
S 1 : { x ˙ 1 = x 2 x ˙ 2 = x 4 x 6 a 1 + b 1 u 2 x ˙ 3 = x 4 x ˙ 4 = x 2 x 6 a 2 + b 2 u 3 x ˙ 5 = x 6 x ˙ 6 = x 2 x 4 a 3 + b 3 u 4 ( 3 )
S 2 : { x ˙ 7 = x 8 x ˙ 8 = − g + cos x 1 cos x 3 u 1 / m x ˙ 9 = x 10 x ˙ 10 = u x u 1 / m x ˙ 11 = x 12 x ˙ 12 = u y u 1 / m ( 4 )
其中, a 1 = J y − J z J x a 2 = J z − J x J y a 3 = J x − J y J z 1 =l/J x ,b2 =l/J y ,b3 =l/J z ,ux =cos x1 sin x3 cos x 5 +sin x1 sin x5 ,uy =cos x1 sin x3 sin x5 -sin x1 cos x5 。
3 基于积分反步法的控制律设计
由式(1)可知,四旋翼飞行器控制研究问题是一个欠驱动控制问题,下面将对其进行具体分析。
3.1 四旋翼飞行器的姿态控制
从式(3)可以看出,四旋翼飞行器的姿态φ、θ和ψ可分别由ui (i=1,2,3)来控制。
e ϕ = ϕ d − ϕ = x 1 d − x 1 ( 5 )
V 1 = 1 2 e ϕ 2 + 1 2 k ϕ Γ ϕ 2 ( 6 )
V ˙ 1 = e ϕ e ˙ ϕ + k ϕ Γ ϕ Γ ˙ ϕ
= e ϕ ( x ˙ 1 d − x ˙ 1 ) + k ϕ Γ ϕ e ϕ ( 7 )
将x ˙ 1 ( x ˙ 1 ) d
( x ˙ 1 ) d = c 1 e ϕ + k ϕ Γ ϕ + x ˙ 1 d ( 8 )
可使得V ˙ 1 = − c 1 e ϕ 2 ≤ 0 1 为正常数。
通过式(8)可得虚拟控制x ˙ 1 ( x ˙ 1 ) d
e ϕ 2 = ( x ˙ 1 ) d − x ˙ 1 = c 1 e ϕ + k ϕ Γ ϕ + x ˙ 1 d − x ˙ 1 ( 9 )
e ˙ ϕ 2 = c 1 e ˙ ϕ + k ϕ e ϕ + x ¨ 1 d − x ˙ 2 =
c 1 ( − c 1 e ϕ − k ϕ Γ ϕ + e ϕ 2 ) + k ϕ e ϕ + x ¨ 1 d − x 4 x 6 a 1 − b 1 u 2 ( 10 )
V 2 = 1 2 e ϕ 2 + 1 2 k ϕ Γ ϕ 2 + 1 2 e ϕ 2 2 ( 11 )
V ˙ 2 = e ϕ e ˙ ϕ + k ϕ Γ ϕ e ϕ + e ϕ 2 e ˙ ϕ 2
= k ϕ Γ ϕ e ϕ + e ϕ ( − c 1 e ϕ − k ϕ Γ ϕ + e ϕ 2 ) + e ϕ 2 e ˙ ϕ 2
= e ϕ ( − c 1 e ϕ + e ϕ 2 ) + e ϕ 2 e ˙ ϕ 2 ( 12 )
e ˙ ϕ 2 = − c 2 e ϕ 2 − e ϕ ( 13 )
可使得V ˙ 2 = − c 1 e ϕ 2 − c 2 e ϕ 2 2 ≤ 0 2 为正常数。
此时,通过比较式(10)和式(13)可得横滚转矩输入控制量u2 为
u 2 = 1 b 1 [ ( − c 1 2 + k ϕ + 1 ) e ϕ + ( c 1 + c 2 ) e ϕ 2
− c 1 k ϕ Γ ϕ + x ¨ 1 d − x 4 x 6 a 1 ] ( 14 )
当积分项参数k ϕ = c 1 2 − 1 ≥ 0 2 可简化为
u 2 = 1 b 1 [ ( c 1 + c 2 ) e ϕ 2 − c 1 k ϕ Γ ϕ + x ¨ 1 d − x 4 x 6 a 1 ] ( 15 )
俯仰角θ的控制机理与横滚角φ相似,首先定义俯仰角跟踪误差角为
e θ = θ d − θ = x 3 d − x 3 ( 16 )
u 3 = 1 b 2 [ ( c 3 + c 4 ) e θ 2 − c 3 k θ Γ θ + x ¨ 3 d − x 2 x 6 a 2 ] ( 17 )
其中,e θ 2 = ( x ˙ 3 ) d − x ˙ 3 Γ θ = ∫ e θ d t 3 、c4 和kθ 为非负的控制器参数,且满足k θ = c 3 2 − 1 ≥ 0
e ψ = ψ d − ψ = x 5 d − x 5 ( 18 )
u 4 = 1 b 3 [ ( c 5 + c 6 ) e ψ 2 − c 5 k ψ Γ ψ + x ¨ 7 d − x 2 x 4 a 3 ] ( 19 )
其中,e ψ 2 = ( x ˙ 5 ) d − x ˙ 5 Γ ψ = ∫ e ψ d t 5 、c6 为非负的控制器参数,k ψ = c 5 2 − 1 ≥ 0
3.2 四旋翼飞行器的位置控制
从式(2)和式(4)可以看出,水平坐标x和y 这两个自由度是欠驱动的,分别由φ、θ和ψ间接驱动。
关于高度的控制,本文也采用积分反步法。定义高度跟踪误差角为
e z 1 = z d − z = x 7 d − x 7 ( 20 )
u 1 = m cos x 1 cos x 3 [ g + ( 1 − c z 1 2 + k z 1 ) e z 1 +
( c z 1 + c z 2 ) e z 2 − c z 1 k z 1 Γ z + x ¨ 7 d ] ( 21 )
其中,e z 2 = ( x ˙ 7 ) d − x ˙ 7 Γ z = ∫ e z d t z1 、cz2 为非负的控制器参数,kz ≥0为积分项参数。
由式(3)和式(4)可得期望的横滚角φd 与俯仰角θd 分别为
ϕ d = x 1 d = sin − 1 ( u x sin x 5 − u y cos x 5 ) ( 22 )
θ d = x 3 d = sin − 1 [ u x cos x 1 cos x 5 − sin x 1 sin x 5 cos x 1 cos x 5 ] ( 23 )
与式(21)相似,可以得出位置坐标x和y的间接控制输入为
{ u x = m u 1 [ e x 1 − c x 1 2 e x 1 + k x 1 e x 1 + c x 1 e x 2 + c x 2 e x 2 + x ¨ 9 d − c x 1 k x 1 Γ x ] u y = m u 1 [ e y 1 − c y 1 2 e y 1 + k y 1 e y 1 + c y 1 e y 2 + c y 2 e y 2 + x ¨ 11 d − c y 1 k y 1 Γ y ] ( 24 )
其中,xd =x9 d 和yd =y11d 分别为在x和y方向上的期望位置,cx1 、cx2 、kx1 、cy1 、cy2 、ky1 都是非负数,Γ x = ∫ e x 1 d t Γ y = ∫ e y 1 d t
{ e x 1 = x d − x = x 9 d − x 9 e x 2 = x ˙ 9 d − x ˙ 9 = c x 1 e x 1 + k x 1 Γ x + x ˙ 9 d − x 10 e y 1 = y d − y = x 11 d − x 11 e y 2 = x ˙ 11 d − x ˙ 11 = c y 1 e y 1 + k y 1 Γ y + x ˙ 11 d − x 12 ( 25 )
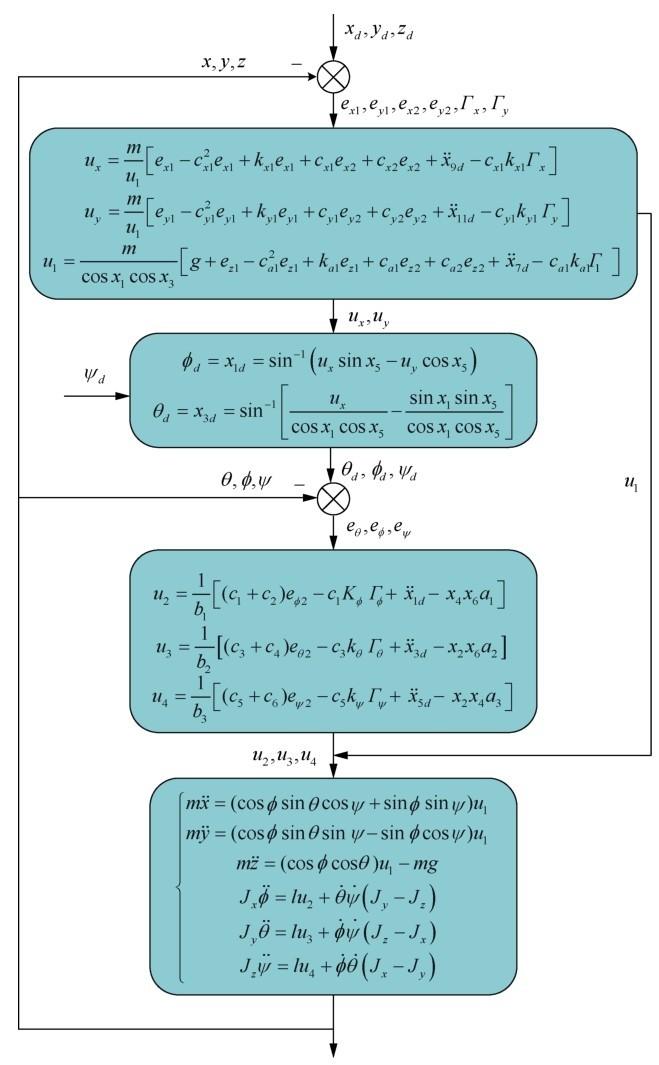
3.3 总体控制流程
综合上述分析可得,基于积分反步法的四旋翼飞行器总体控制流程如图1 所示。
图1
4 仿真结果与性能分析
4.1 四旋翼飞行器的姿态镇定仿真实验
选取机体姿态的初始状态和目标状态分别为( ϕ 0 , θ 0 , ψ 0 ) = ( 45 ∘ , 30 ∘ , 60 ∘ ) ϕ d = θ d = ψ d = 0 ∘
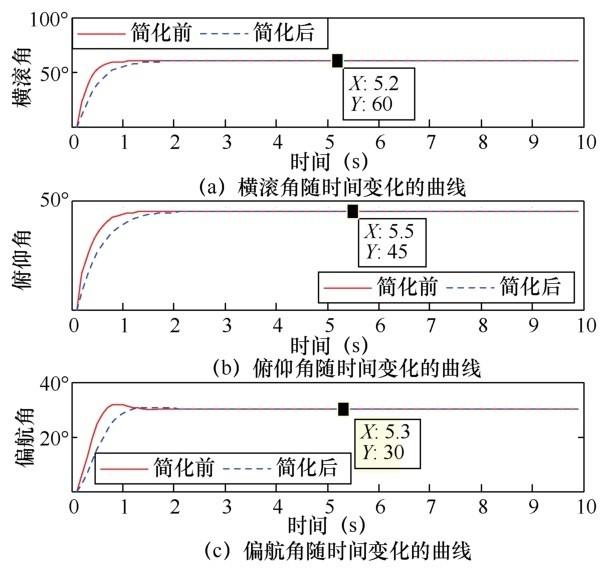
图2 给出了控制模型简化前、后飞行器各姿态角随时间变化的过程。从图中可以看出,横滚角、俯仰角和偏航角都能在各自控制器的作用下在较短时间内迅速、无稳态误差地收敛至期望的目标姿态角。不同的是,控制模型简化后的控制器由于利用积分项参数调节的方式降低了姿态控制力度,其收敛时间(4 s)要略长于控制模型简化前的收敛时间(2 s)。
图2
图2
控制模型简化前、后飞行器各姿态角随时间变化的曲线
表2 给出了四旋翼飞行器在简化前、后的各姿态控制器作用下各步的运算耗时,可以看出,利用积分项简化后,控制模型各步的运行时间较短。
图2 和表2 说明了本文提出的以积分项参数调节的方式来简化姿态控制模型的方案是可行的,可将其应用到飞行器定点到达和轨迹跟踪的仿真实验中。
4.2 四旋翼飞行器的定点到达仿真实验
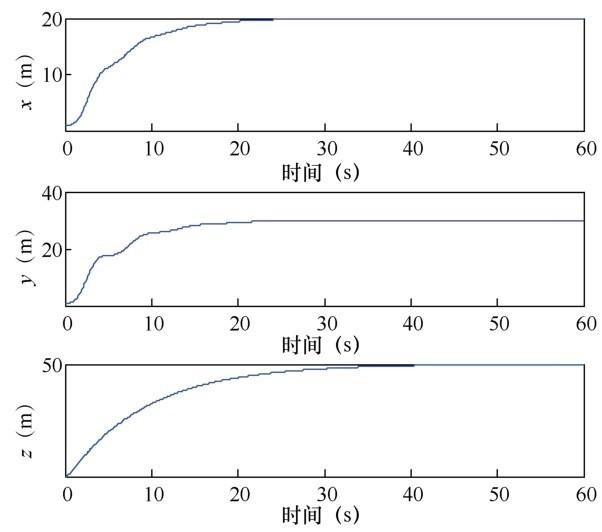
下面的实验是为了验证简化后的积分反步法控制器可实现飞行器的定点到达。选定四旋翼飞行器的初始平衡点和目标状态分别为
{ ( x 0 , y 0 , z 0 ) = ( 0 , 0 , 0 ) ( x ˙ 0 , y ˙ 0 , z ˙ 0 ) = ( 1 , − 2 , 0 ) ϕ 0 = θ 0 = ψ 0 = 0 ∘ , { ( x d , y d , z d ) = ( 20 , 30 , 50 ) ψ d = 60 ∘
其中,位置和速度的单位分别为 s 和 m/s,仿真时间为60 s。
图3 给出了四旋翼飞行器各位置信息随时间变化的曲线。从图中可以看出,简化后的积分反步法控制器可使飞行器最终到达期望的位置定点。
图3
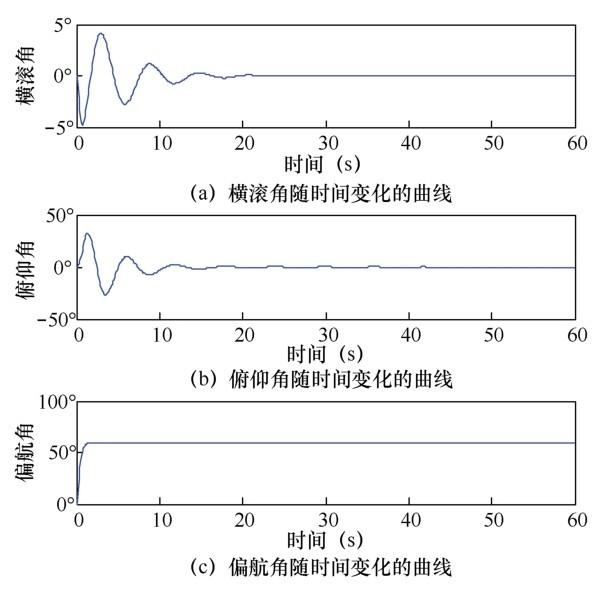
图4 给出了四旋翼飞行器各姿态角随时间变化的曲线。可以看出,横滚角和俯仰角虽然在简化后的控制器作用下最终都能收敛到一个稳定值,但是其振荡幅值较大且相比于偏航角收敛速度较慢。这是因为期望偏航角是事先设置的,是一个稳定的值,但期望的横滚角和俯仰角是按照无人机的其他参数实时获取的,是不确定的参数,故相对于其他两个姿态角的跟踪过程,偏航角的振荡幅值更小,收敛时间更短。
图4
4.3 四旋翼飞行器的轨迹跟踪仿真实验
下面的实验是为了验证简化后的积分反步法控制器可实现飞行器的轨迹跟踪。选定四旋翼飞行器在平衡点处,即(x0 ,y0 ,z0 )=(1,1,0),ϕ 0 = θ 0 = ψ 0 = 0 ∘ d =0.4sin t, yd =0.5sin t,zd =0.3sin t,ψd =30 sin t。位置、速度的单位分别为s、m/s,仿真时间为100 s。
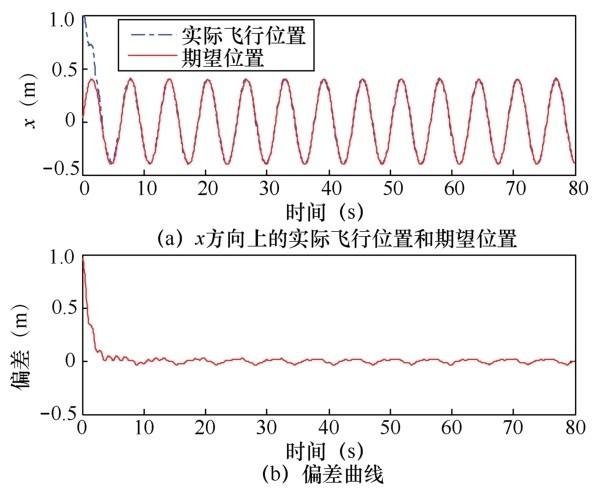
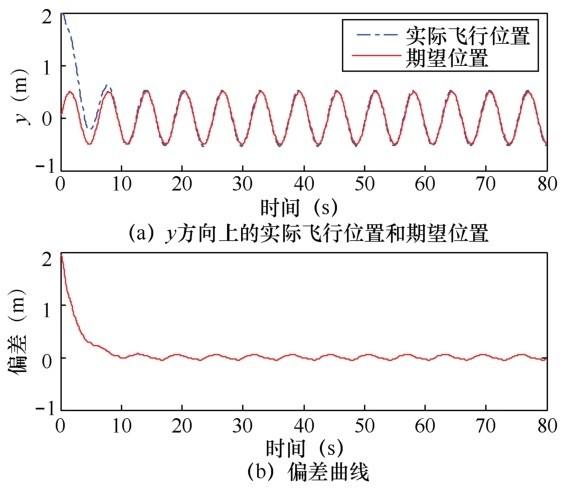
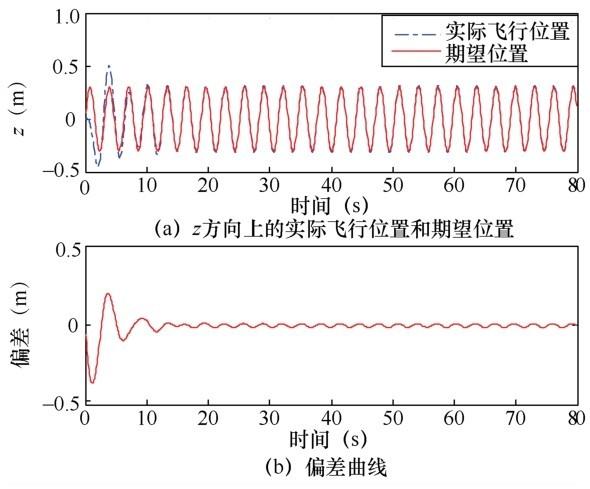
图5 ,图6 ,图7 给出了在简化后的控制器作用下四旋翼飞行器的实际飞行位置和期望位置及其偏差曲线。可以看出,简化后的飞行器能较好地跟踪期望轨迹,并且其水平位置和高度位置能分别在10 s和40 s内无误差地稳定跟踪。
图5
图5
x方向上的实际飞行位置和期望位置及其偏差曲线
图6
图6
y方向上的实际飞行位置和期望位置及其偏差曲线
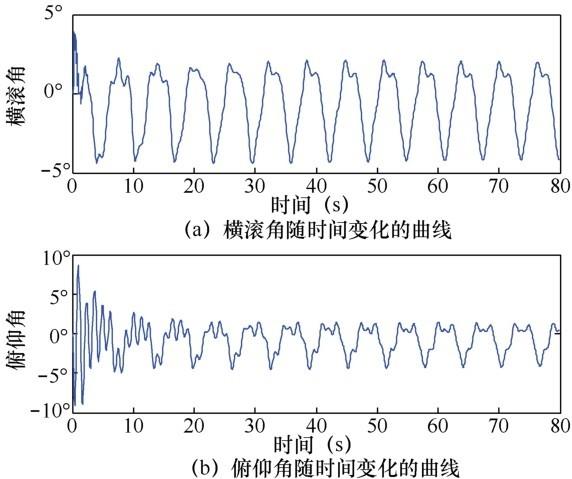
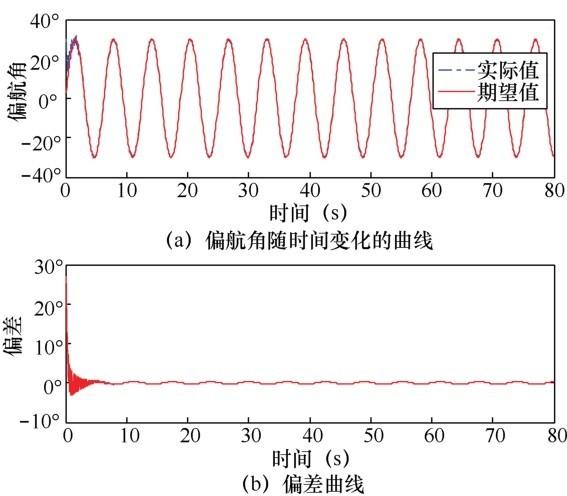
图8 至图9 给出了在简化后的控制器作用下四旋翼飞行器各姿态角随时间变化的曲线。可以看出,简化后的控制器能够使偏航角快速地跟踪上期望的正弦路线,且不会产生稳定的误差;同时,虽然没有给定规则的期望横滚角和俯仰角,但水平位置的稳定会使横滚角和俯仰角形成一个稳定的轨迹。
图7
图7
z方向上的实际飞行位置和期望位置及其偏差曲线
图8
图9
图9
四旋翼飞行器偏航角随时间变化的曲线及其偏差曲线
综合上述实验结果可知,基于积分反步法的四旋翼飞行器控制设计能实现位置和姿态的有效控制。
5 结束语
本文提出了一种基于积分反步法的飞行控制律设计方法。利用反步法的李雅普诺夫稳定性理论,保证了飞行器PID控制器的稳定性,同时鉴于姿态控制子系统的完全驱动特性,通过加入积分项和设置合理的积分项参数等,达到简化控制器模型的目的。仿真实验结果表明,简化后的积分反步法四旋翼飞行器控制设计能够无误差地实现其各姿态跟踪、定点达到、位置与偏航角的轨迹跟踪。
The authors have declared that no competing interests exist.
作者已声明无竞争性利益关系。
参考文献
View Option
[1]
KAYACAN E , MASLIM R . Type-2 fuzzy logic trajectory tracking control of quadrotor VTOL aircraft with elliptic membership functions
[J]. IEEE/ASME Transactions on Mechatronics , 2017 ,22 (2 ): 339 -348 .
[本文引用: 1]
[2]
KOCER B B , TJAHIOWIDODO T , LEE G S G . Centralized predictive ceiling interaction control of quadrotor VTOL UAV
[J]. Aerospace Science & Technology , 2018 ,76 (1 ): 455 -465 .
[本文引用: 1]
[3]
LYU X , GU H , ZHOU J ,et al . A hierarchical control approach for a quadrotor tail-sitter VTOL UAV and experimental verification
[C]// IEEE International Conference on Intelligent Robots and Systems Hongkong,China , 2017 .
[本文引用: 1]
[4]
张居乾 , 任朝晖 , 周来宏 ,等 . 基于指数收敛的四旋翼无人机鲁棒自适应飞行控制
[J]. 中国惯性技术学报 , 2016 ,24 (4 ): 548 -553 .
[本文引用: 1]
ZHANG J Q , REN Z H , ZHOU L H ,et al . Robust and adaptive flight control of quadrotor based on exponential convergence
[J]. Journal of Chinese Inertial Technology , 2016 ,24 (4 ): 548 -553 .
[本文引用: 1]
[5]
DU B H , POLYAKOV A , ZHENG G ,et al . Quadrotor trajectory tracking by using fixed-time differentiator
[J]. International Journal of Control , 2018 : 1 -15 .
[本文引用: 1]
[6]
CHERRAT N , BOUBERTAKH H , ARIOUI H . Adaptive fuzzy PID control for a quadrotor stabilization
[J]. IOP Conference Series:Materials Science and Engineering , 2018 ,312 (1 ):012002.
[本文引用: 1]
[7]
BOLANDI H , REZAEI M , MOHSENIPOUR R ,et al . Attitude control of a quadrotor with optimized PID controller
[J]. Intelligent Control &Automation , 2013 ,4 (3 ): 342 -349 .
[本文引用: 1]
[8]
WANG H Y , ZHAO J K , YU W X ,et al . Modelling and position tracking control for quadrotor vehicle
[J]. Journal of Chinese Inertial Technology , 2012a ,20 (4 ): 455 -489 .
[本文引用: 1]
[9]
陈彦民 , 何勇灵 , 孔令博 . 四旋翼飞行器分散PID神经元网络控制
[J]. 中国惯性技术学报 , 2014 ,22 (2 ): 185 -190 .
[本文引用: 1]
CHEN Y M , HE Y L , KONG L B . Decentralized PID neural network control for a quadrotor helicopter
[J]. Journal of Chinese Inertial Technology , 2014 ,22 (2 ): 185 -190 .
[本文引用: 1]
[10]
TAO Y , XIE G , CHEN Y ,et al . A PID and fuzzy logic based method for quadrotor aircraft control motion
[J]. Journal of Intelligent & Fuzzy Systems , 2016 ,31 (6 ): 2975 -2983 .
[本文引用: 1]
[11]
姚乐 , 管业鹏 , 金星 . 基于改进单神经元的四旋翼PID控制器设计
[J]. 计算机测量与控制 , 2016 ,24 (4 ): 68 -70 .
[本文引用: 2]
YAO L , GUAN Y P , JIN X . Design of quadrotor PID controller based on improved single neuron
[J]. Computer Measurement & Control , 2016 ,24 (4 ): 68 -70 .
[本文引用: 2]
[12]
李砚浓 , 李汀兰 , 姜艺 ,等 . 基于RBF神经网络自适应PID四旋翼飞行器控制
[J]. 控制工程 , 2016 ,23 (3 ): 378 -382 .
[本文引用: 1]
LI Y N , LI T L , JIANG Y ,et al . Adaptive PID control of quadrotor based on RBF neural network
[J]. Control Engineering of China , 2016 ,23 (3 ): 378 -382 .
[本文引用: 1]
[13]
BOUABDALLAH S , SIEGWART R . Backstepping and sliding -mode techniques applied and indoor micro quadrotor
[J]. IEEE Trans.on Robotics and Automation , 2005 : 2259 -5564 .
[本文引用: 1]
[14]
BASRI M A M , HUSAIN A R , DANAPALASIGAM K A . Enhanced back-stepping controller design with application to autonomous quadrotor unmanned aerial vehicle
[J]. Journal of Intelligent &Robotic Systems , 2015 ,79 (2 ): 295 -321 .
[本文引用: 1]
[15]
滕雄 , 吴怀宇 , 陈洋 ,等 . 基于反步法的四旋翼飞行器轨迹跟踪研究
[J]. 计算机仿真 , 2016 ,33 (5 ): 78 -83 .
[本文引用: 1]
TENG X , WU H Y , CHEN Y . Trajectory tracking of quadrotor aircraft base on back-stepping
[J]. Computer Simulation , 2016 ,33 (5 ): 78 -83 .
[本文引用: 1]
[16]
夏琳琳 , 丛靖宇 , 马文杰 ,等 . 基于浸入与不变原理的四旋翼姿态系统反步滑模控制
[J]. 中国惯性技术学报 , 2017 ,25 (5 ): 695 -700 .
[本文引用: 1]
XIA L L , CONG J Y , MA W J . Back-stepping sliding mode control of quadrotor attitude system based on immersion and invariance
[J]. Journal of Chinese Inertial Technology , 2017 ,25 (5 ): 695 -700 .
[本文引用: 1]
Type-2 fuzzy logic trajectory tracking control of quadrotor VTOL aircraft with elliptic membership functions
1
2017
... 四旋翼飞行器通过电机带动螺旋桨旋转,能够完成垂直起降、定点悬停等行为动作,且其操作简易,因此备受青睐[1 ,2 ,3 ,4 ] .但是,四旋翼飞行器的强非线性、强耦合性和欠驱动性,使得其控制方法偏难、控制模型复杂,因此一直是国内外学者研究的重点和难点[5 ] . ...
Centralized predictive ceiling interaction control of quadrotor VTOL UAV
1
2018
... 四旋翼飞行器通过电机带动螺旋桨旋转,能够完成垂直起降、定点悬停等行为动作,且其操作简易,因此备受青睐[1 ,2 ,3 ,4 ] .但是,四旋翼飞行器的强非线性、强耦合性和欠驱动性,使得其控制方法偏难、控制模型复杂,因此一直是国内外学者研究的重点和难点[5 ] . ...
A hierarchical control approach for a quadrotor tail-sitter VTOL UAV and experimental verification
1
2017
... 四旋翼飞行器通过电机带动螺旋桨旋转,能够完成垂直起降、定点悬停等行为动作,且其操作简易,因此备受青睐[1 ,2 ,3 ,4 ] .但是,四旋翼飞行器的强非线性、强耦合性和欠驱动性,使得其控制方法偏难、控制模型复杂,因此一直是国内外学者研究的重点和难点[5 ] . ...
基于指数收敛的四旋翼无人机鲁棒自适应飞行控制
1
2016
... 四旋翼飞行器通过电机带动螺旋桨旋转,能够完成垂直起降、定点悬停等行为动作,且其操作简易,因此备受青睐[1 ,2 ,3 ,4 ] .但是,四旋翼飞行器的强非线性、强耦合性和欠驱动性,使得其控制方法偏难、控制模型复杂,因此一直是国内外学者研究的重点和难点[5 ] . ...
基于指数收敛的四旋翼无人机鲁棒自适应飞行控制
1
2016
... 四旋翼飞行器通过电机带动螺旋桨旋转,能够完成垂直起降、定点悬停等行为动作,且其操作简易,因此备受青睐[1 ,2 ,3 ,4 ] .但是,四旋翼飞行器的强非线性、强耦合性和欠驱动性,使得其控制方法偏难、控制模型复杂,因此一直是国内外学者研究的重点和难点[5 ] . ...
Quadrotor trajectory tracking by using fixed-time differentiator
1
2018
... 四旋翼飞行器通过电机带动螺旋桨旋转,能够完成垂直起降、定点悬停等行为动作,且其操作简易,因此备受青睐[1 ,2 ,3 ,4 ] .但是,四旋翼飞行器的强非线性、强耦合性和欠驱动性,使得其控制方法偏难、控制模型复杂,因此一直是国内外学者研究的重点和难点[5 ] . ...
Adaptive fuzzy PID control for a quadrotor stabilization
1
2018
... 传统的PID(比例(proportion)、积分(integral)、微分(differential))控制算法原理简单,但是控制参数很难随着环境的变化进行自我调节[6 ,7 ,8 ,9 ,10 ] .文献[11 ]提出利用神经网络(neural networks)的自学习能力对PID控制参数进行实时优化,但是该方法的实时性较差,这是因为控制参数的自学习过程需要时间.文献[12 ]在文献[11 ]的基础上,加入了自适应环节来提高系统的收敛速度,解决了实时性差的问题.但是,加入神经网络辅助的PID控制算法复杂度较高,在工程上难以实现. ...
Attitude control of a quadrotor with optimized PID controller
1
2013
... 传统的PID(比例(proportion)、积分(integral)、微分(differential))控制算法原理简单,但是控制参数很难随着环境的变化进行自我调节[6 ,7 ,8 ,9 ,10 ] .文献[11 ]提出利用神经网络(neural networks)的自学习能力对PID控制参数进行实时优化,但是该方法的实时性较差,这是因为控制参数的自学习过程需要时间.文献[12 ]在文献[11 ]的基础上,加入了自适应环节来提高系统的收敛速度,解决了实时性差的问题.但是,加入神经网络辅助的PID控制算法复杂度较高,在工程上难以实现. ...
Modelling and position tracking control for quadrotor vehicle
1
2012a
... 传统的PID(比例(proportion)、积分(integral)、微分(differential))控制算法原理简单,但是控制参数很难随着环境的变化进行自我调节[6 ,7 ,8 ,9 ,10 ] .文献[11 ]提出利用神经网络(neural networks)的自学习能力对PID控制参数进行实时优化,但是该方法的实时性较差,这是因为控制参数的自学习过程需要时间.文献[12 ]在文献[11 ]的基础上,加入了自适应环节来提高系统的收敛速度,解决了实时性差的问题.但是,加入神经网络辅助的PID控制算法复杂度较高,在工程上难以实现. ...
四旋翼飞行器分散PID神经元网络控制
1
2014
... 传统的PID(比例(proportion)、积分(integral)、微分(differential))控制算法原理简单,但是控制参数很难随着环境的变化进行自我调节[6 ,7 ,8 ,9 ,10 ] .文献[11 ]提出利用神经网络(neural networks)的自学习能力对PID控制参数进行实时优化,但是该方法的实时性较差,这是因为控制参数的自学习过程需要时间.文献[12 ]在文献[11 ]的基础上,加入了自适应环节来提高系统的收敛速度,解决了实时性差的问题.但是,加入神经网络辅助的PID控制算法复杂度较高,在工程上难以实现. ...
四旋翼飞行器分散PID神经元网络控制
1
2014
... 传统的PID(比例(proportion)、积分(integral)、微分(differential))控制算法原理简单,但是控制参数很难随着环境的变化进行自我调节[6 ,7 ,8 ,9 ,10 ] .文献[11 ]提出利用神经网络(neural networks)的自学习能力对PID控制参数进行实时优化,但是该方法的实时性较差,这是因为控制参数的自学习过程需要时间.文献[12 ]在文献[11 ]的基础上,加入了自适应环节来提高系统的收敛速度,解决了实时性差的问题.但是,加入神经网络辅助的PID控制算法复杂度较高,在工程上难以实现. ...
A PID and fuzzy logic based method for quadrotor aircraft control motion
1
2016
... 传统的PID(比例(proportion)、积分(integral)、微分(differential))控制算法原理简单,但是控制参数很难随着环境的变化进行自我调节[6 ,7 ,8 ,9 ,10 ] .文献[11 ]提出利用神经网络(neural networks)的自学习能力对PID控制参数进行实时优化,但是该方法的实时性较差,这是因为控制参数的自学习过程需要时间.文献[12 ]在文献[11 ]的基础上,加入了自适应环节来提高系统的收敛速度,解决了实时性差的问题.但是,加入神经网络辅助的PID控制算法复杂度较高,在工程上难以实现. ...
基于改进单神经元的四旋翼PID控制器设计
2
2016
... 传统的PID(比例(proportion)、积分(integral)、微分(differential))控制算法原理简单,但是控制参数很难随着环境的变化进行自我调节[6 ,7 ,8 ,9 ,10 ] .文献[11 ]提出利用神经网络(neural networks)的自学习能力对PID控制参数进行实时优化,但是该方法的实时性较差,这是因为控制参数的自学习过程需要时间.文献[12 ]在文献[11 ]的基础上,加入了自适应环节来提高系统的收敛速度,解决了实时性差的问题.但是,加入神经网络辅助的PID控制算法复杂度较高,在工程上难以实现. ...
... ]在文献[11 ]的基础上,加入了自适应环节来提高系统的收敛速度,解决了实时性差的问题.但是,加入神经网络辅助的PID控制算法复杂度较高,在工程上难以实现. ...
基于改进单神经元的四旋翼PID控制器设计
2
2016
... 传统的PID(比例(proportion)、积分(integral)、微分(differential))控制算法原理简单,但是控制参数很难随着环境的变化进行自我调节[6 ,7 ,8 ,9 ,10 ] .文献[11 ]提出利用神经网络(neural networks)的自学习能力对PID控制参数进行实时优化,但是该方法的实时性较差,这是因为控制参数的自学习过程需要时间.文献[12 ]在文献[11 ]的基础上,加入了自适应环节来提高系统的收敛速度,解决了实时性差的问题.但是,加入神经网络辅助的PID控制算法复杂度较高,在工程上难以实现. ...
... ]在文献[11 ]的基础上,加入了自适应环节来提高系统的收敛速度,解决了实时性差的问题.但是,加入神经网络辅助的PID控制算法复杂度较高,在工程上难以实现. ...
基于RBF神经网络自适应PID四旋翼飞行器控制
1
2016
... 传统的PID(比例(proportion)、积分(integral)、微分(differential))控制算法原理简单,但是控制参数很难随着环境的变化进行自我调节[6 ,7 ,8 ,9 ,10 ] .文献[11 ]提出利用神经网络(neural networks)的自学习能力对PID控制参数进行实时优化,但是该方法的实时性较差,这是因为控制参数的自学习过程需要时间.文献[12 ]在文献[11 ]的基础上,加入了自适应环节来提高系统的收敛速度,解决了实时性差的问题.但是,加入神经网络辅助的PID控制算法复杂度较高,在工程上难以实现. ...
基于RBF神经网络自适应PID四旋翼飞行器控制
1
2016
... 传统的PID(比例(proportion)、积分(integral)、微分(differential))控制算法原理简单,但是控制参数很难随着环境的变化进行自我调节[6 ,7 ,8 ,9 ,10 ] .文献[11 ]提出利用神经网络(neural networks)的自学习能力对PID控制参数进行实时优化,但是该方法的实时性较差,这是因为控制参数的自学习过程需要时间.文献[12 ]在文献[11 ]的基础上,加入了自适应环节来提高系统的收敛速度,解决了实时性差的问题.但是,加入神经网络辅助的PID控制算法复杂度较高,在工程上难以实现. ...
Backstepping and sliding -mode techniques applied and indoor micro quadrotor
1
2005
... 反步法在四旋翼飞行器系统控制设计中越来越多地受到重视,但是存在虚拟控制量表达形式复杂,以及控制算法设计复杂和物理实现困难的问题[13 ,14 ,15 ,16 ] .本文提出了一种基于积分反步法(integral back- stepping algorithm)的四旋翼飞行器控制律设计方法.该方法先对四旋翼飞行器进行数学建模,并利用基于李雅普诺夫(Lyapunov)稳定性理论的反步法实现了飞行器位置和姿态的有效跟踪控制,同时在对姿态控制的反步法设计中加入了积分项,并通过设置适当的积分项常数来简化控制器模型.仿真实验验证,该控制器能够无误差地实现姿态跟踪、定点到达和轨迹跟踪. ...
Enhanced back-stepping controller design with application to autonomous quadrotor unmanned aerial vehicle
1
2015
... 反步法在四旋翼飞行器系统控制设计中越来越多地受到重视,但是存在虚拟控制量表达形式复杂,以及控制算法设计复杂和物理实现困难的问题[13 ,14 ,15 ,16 ] .本文提出了一种基于积分反步法(integral back- stepping algorithm)的四旋翼飞行器控制律设计方法.该方法先对四旋翼飞行器进行数学建模,并利用基于李雅普诺夫(Lyapunov)稳定性理论的反步法实现了飞行器位置和姿态的有效跟踪控制,同时在对姿态控制的反步法设计中加入了积分项,并通过设置适当的积分项常数来简化控制器模型.仿真实验验证,该控制器能够无误差地实现姿态跟踪、定点到达和轨迹跟踪. ...
基于反步法的四旋翼飞行器轨迹跟踪研究
1
2016
... 反步法在四旋翼飞行器系统控制设计中越来越多地受到重视,但是存在虚拟控制量表达形式复杂,以及控制算法设计复杂和物理实现困难的问题[13 ,14 ,15 ,16 ] .本文提出了一种基于积分反步法(integral back- stepping algorithm)的四旋翼飞行器控制律设计方法.该方法先对四旋翼飞行器进行数学建模,并利用基于李雅普诺夫(Lyapunov)稳定性理论的反步法实现了飞行器位置和姿态的有效跟踪控制,同时在对姿态控制的反步法设计中加入了积分项,并通过设置适当的积分项常数来简化控制器模型.仿真实验验证,该控制器能够无误差地实现姿态跟踪、定点到达和轨迹跟踪. ...
基于反步法的四旋翼飞行器轨迹跟踪研究
1
2016
... 反步法在四旋翼飞行器系统控制设计中越来越多地受到重视,但是存在虚拟控制量表达形式复杂,以及控制算法设计复杂和物理实现困难的问题[13 ,14 ,15 ,16 ] .本文提出了一种基于积分反步法(integral back- stepping algorithm)的四旋翼飞行器控制律设计方法.该方法先对四旋翼飞行器进行数学建模,并利用基于李雅普诺夫(Lyapunov)稳定性理论的反步法实现了飞行器位置和姿态的有效跟踪控制,同时在对姿态控制的反步法设计中加入了积分项,并通过设置适当的积分项常数来简化控制器模型.仿真实验验证,该控制器能够无误差地实现姿态跟踪、定点到达和轨迹跟踪. ...
基于浸入与不变原理的四旋翼姿态系统反步滑模控制
1
2017
... 反步法在四旋翼飞行器系统控制设计中越来越多地受到重视,但是存在虚拟控制量表达形式复杂,以及控制算法设计复杂和物理实现困难的问题[13 ,14 ,15 ,16 ] .本文提出了一种基于积分反步法(integral back- stepping algorithm)的四旋翼飞行器控制律设计方法.该方法先对四旋翼飞行器进行数学建模,并利用基于李雅普诺夫(Lyapunov)稳定性理论的反步法实现了飞行器位置和姿态的有效跟踪控制,同时在对姿态控制的反步法设计中加入了积分项,并通过设置适当的积分项常数来简化控制器模型.仿真实验验证,该控制器能够无误差地实现姿态跟踪、定点到达和轨迹跟踪. ...
基于浸入与不变原理的四旋翼姿态系统反步滑模控制
1
2017
... 反步法在四旋翼飞行器系统控制设计中越来越多地受到重视,但是存在虚拟控制量表达形式复杂,以及控制算法设计复杂和物理实现困难的问题[13 ,14 ,15 ,16 ] .本文提出了一种基于积分反步法(integral back- stepping algorithm)的四旋翼飞行器控制律设计方法.该方法先对四旋翼飞行器进行数学建模,并利用基于李雅普诺夫(Lyapunov)稳定性理论的反步法实现了飞行器位置和姿态的有效跟踪控制,同时在对姿态控制的反步法设计中加入了积分项,并通过设置适当的积分项常数来简化控制器模型.仿真实验验证,该控制器能够无误差地实现姿态跟踪、定点到达和轨迹跟踪. ...










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}