



物联网学报 ›› 2021, Vol. 5 ›› Issue (2): 87-96.doi: 10.11959/j.issn.2096-3750.2021.00229
林椿珉, 曾烈康, 陈旭
修回日期:2021-03-20
出版日期:2021-06-30
发布日期:2021-06-01
作者简介:林椿珉(1997- ),男,中山大学计算机学院硕士生,主要研究方向为无人机自动驾驶、边缘计算、边缘智能等基金资助:Chunmin LIN, Liekang ZENG, Xu CHEN
Revised:2021-03-20
Online:2021-06-30
Published:2021-06-01
Supported by:摘要:
近年来,无人机的自主导航技术在多个行业中受到了广泛的关注,相比于传统的导航技术,采用图像感知的深度学习方法具有很好的泛化能力并且不受全球定位系统(GPS, global positioning system)信号的影响,被证明是一种具有前景的自主导航方法。然而,深度学习的推断需要较大功耗,这对于能耗资源十分有限的无人机来说是一项挑战。针对该问题,基于边缘智能理论,将强化学习技术引入无人机端侧的推断过程中,根据无人机所处的环境复杂度实时感知信息,动态配置卷积神经网络的结构参数,使得无人机在保持稳定导航的同时,尽可能地减少计算功耗开销,实现无人机高可靠、低时延与高能效的自主导航飞行能力。该算法在仿真环境和现实环境中分别进行了验证,实验结果表明,相比于对比算法,所提的基于强化学习动态配置算法能够让无人机花费更少的计算能耗开销具有更长的飞行距离与更高的成功率。
中图分类号:
林椿珉, 曾烈康, 陈旭. 边缘智能驱动的高能效无人机自主导航算法研究[J]. 物联网学报, 2021, 5(2): 87-96.
Chunmin LIN, Liekang ZENG, Xu CHEN. Research on power efficient autonomous UAV navigation algorithm: an edge intelligence driven approach[J]. Chinese Journal on Internet of Things, 2021, 5(2): 87-96.

图1
面向自主导航任务的无人机计算场景"
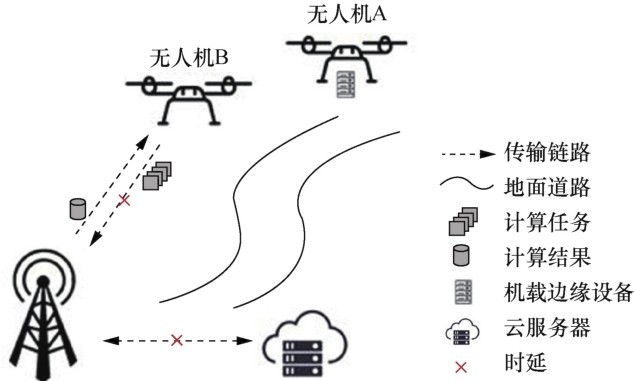

图2
卷积神经网络结构"


图3
空间金字塔池化结构"
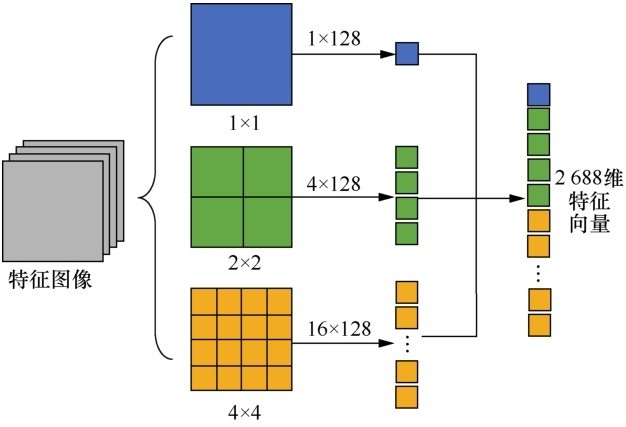

图4
强化学习动态配置框架"


图5
飞行配置时间线"

图6
不同环境复杂度灰度图像"
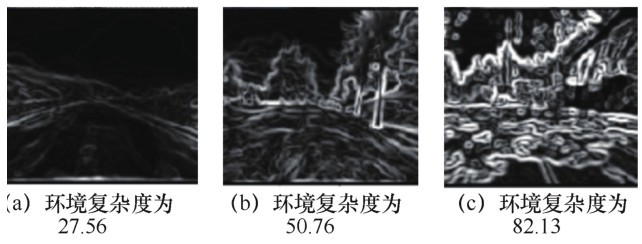
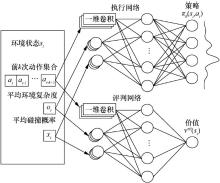
图7
actor-critic算法框架"
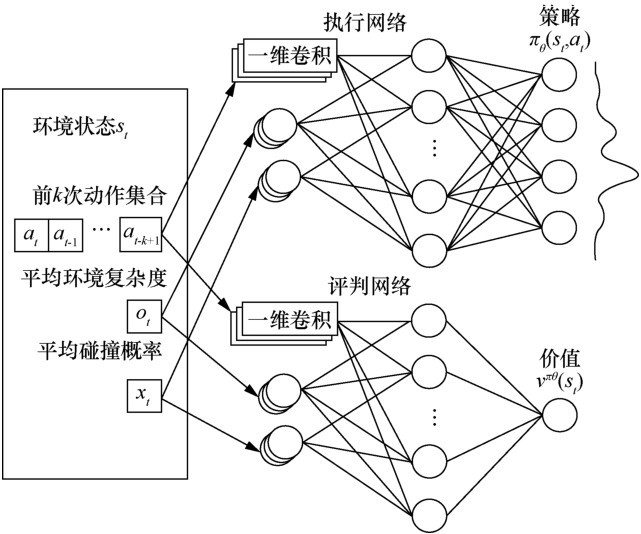
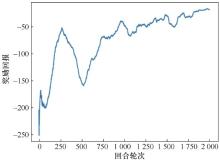
图8
算法训练收敛曲线"
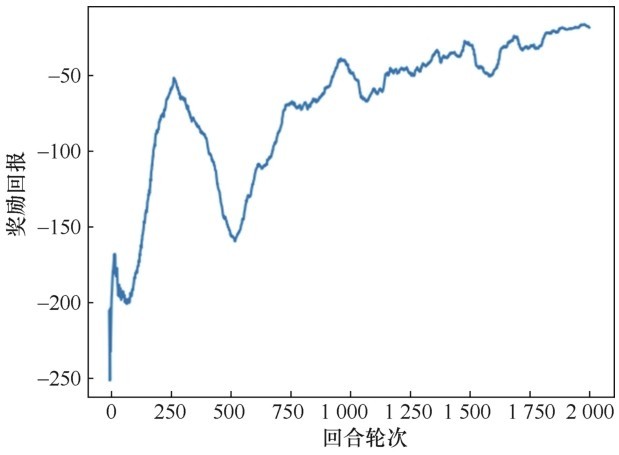

图9
AirSim仿真训练环境"
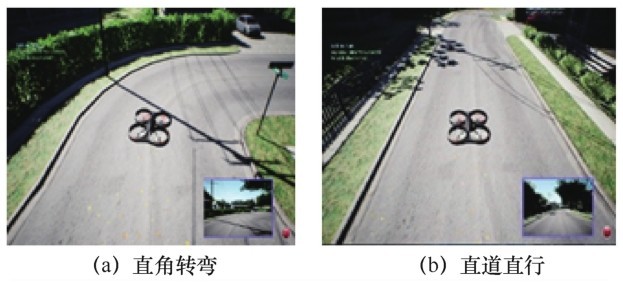
表1
3种算法飞行指标数据"
| 算法 | 距离/m | 成功率 | 功率/W |
| 静态配置 | 73.6 | 89% | 6.1 |
| 阈值配置 | 67.2 | 83% | 4.2 |
| 强化学习配置 | 77.6 | 92% | 3.9 |

图10
无人机硬件架构"
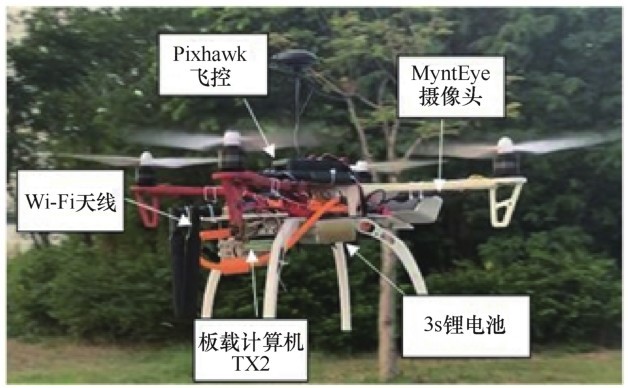
表2
Nvidia Jetson TX2规格"
| CPU | 2.00 GHz 四核ARM Cortex-A572.00 GHz 双核Denver 2 |
| 内存 | 1 600 MHz 8 GB LPDDR4 |
| GPU | Pascal架构,256个CUDA核心 |
| 理想状态5 | |
| 功耗/W | 满载状态15 |
| 平均9.5 |
表3
3种算法续航时间"
| 算法 | 静态配置 | 阈值配置 | 强化学习配置 |
| 续航时间/s | 821 | 879 | 945 |
| [1] | FAESSLER M , FONTANA F , FORSTER C ,et al. Autonomous,vision-based flight and live dense 3D mapping with a quadrotor micro aerial vehicle[J]. Journal of Field Robotics, 2016,33(4): 431-450. |
| [2] | SCHERER S , REHDER J , ACHAR S ,et al. River mapping from a flying robot:state estimation,river detection,and obstacle mapping[J]. Autonomous Robots, 2012,33(1/2): 189-214. |
| [3] | PALOSSI D , GOMEZ A , DRASKOVIC S ,et al. Extending the lifetime of nano-blimps via dynamic motor control[J]. Journal of Signal Processing Systems, 2019,91(3/4): 339-361. |
| [4] | ZHOU Z , CHEN X , LI E ,et al. Edge intelligence:paving the last mile of artificial intelligence with edge computing[J]. Proceedings of the IEEE, 2019,107(8): 1738-1762. |
| [5] | SHEN S J , MULGAONKAR Y , MICHAEL N ,et al. Multi-sensor fusion for robust autonomous flight in indoor and outdoor environments with a rotorcraft MAV[C]// 2014 IEEE International Conference on Robotics and Automation (ICRA). Piscataway:IEEE Press, 2014: 4974-4981. |
| [6] | WEISS S , SCARAMUZZA D , SIEGWART R . Monocular-SLAMbased navigation for autonomous micro helicopters in GPS-denied environments[J]. Journal of Field Robotics, 2011,28(6): 854-874. |
| [7] | ROSS S , MELIK-BARKHUDAROV N , SHANKAR K S ,et al. Learning monocular reactive UAV control in cluttered natural environments[C]// 2013 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 2013: 1765-1772. |
| [8] | GIUSTI A , GUZZI J , CIRE?AN D C ,et al. A machine learning approach to visual perception of forest trails for mobile robots[J]. IEEE Robotics and Automation Letters, 2016,1(2): 661-667. |
| [9] | SMOLYANSKIY N , KAMENEV A , SMITH J ,et al. Toward low-flying autonomous MAV trail navigation using deep neural networks for environmental awareness[C]// 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway:IEEE Press, 2017: 4241-4247. |
| [10] | MEHROOZ G , EBEID E , SCHNEIDER-KAMP P . System design of an open-source cloud-based framework for Internet of drones application[C]// 2019 22nd Euromicro Conference on Digital System Design (DSD). Piscataway:IEEE Press, 2019: 572-579. |
| [11] | PALOSSI D , LOQUERCIO A , CONTI F ,et al. A 64-mW DNN-based visual navigation engine for autonomous nano-drones[J]. IEEE Internet of Things Journal, 2019,6(5): 8357-8371. |
| [12] | 李肯立, 刘楚波 . 边缘智能:现状和展望[J]. 大数据, 2019,5(3): 69-75. |
| LI K L , LIU C B . Edge intelligence:state-of-the-art and expectations[J]. Big Data Research, 2019,5(3): 69-75. | |
| [13] | 莫梓嘉, 高志鹏, 苗东 . 边缘智能:人工智能向边缘分布式拓展的新触角[J]. 数据与计算发展前沿, 2020,2(4): 16-27. |
| MO Z J , GAO Z P , MIAO D . Edge intelligence:a new exploration for artificial intelligence expanding to edge[J]. Frontiers of Data & Computing, 2020,2(4): 16-27. | |
| [14] | ZHANG X Z , WANG Y F , LU S D ,et al. OpenEI:an open framework for edge intelligence[C]// 2019 IEEE 39th International Conference on Distributed Computing Systems (ICDCS). Piscataway:IEEE Press, 2019: 1840-1851. |
| [15] | FRAGKOS G , KEMP N , TSIROPOULOU E E ,et al. Artificial intelligence empowered UAVs data offloading in mobile edge computing[C]// ICC 2020-2020 IEEE International Conference on Communications (ICC). Piscataway:IEEE Press, 2020: 1-7. |
| [16] | 张星洲, 鲁思迪, 施巍松 . 边缘智能中的协同计算技术研究[J]. 人工智能, 2019,6(5): 55-67. |
| ZHANG X Z , LU S D , SHI W S . Research on collaborative computing technology in edge intelligence[J]. Artificial Intelligence, 2019,6(5): 55-67. | |
| [17] | 刘通, 方璐, 高洪皓 . 边缘计算中任务卸载研究综述[J]. 计算机科学, 2021,48(1): 11-15. |
| LIU T , FANG L , GAO H H . Survey of task offloading in edge computing[J]. Computer Science, 2021,48(1): 11-15. | |
| [18] | MCMAHAN B , RAMAGE D . Federated learning:collaborative machine learning without centralized training data[J]. Google Research Blog, 2017:3. |
| [19] | FANG B Y , ZENG X , ZHANG M . NestDNN:resource-aware multi-tenant on-device deep learning for continuous mobile vision[C]// MobiCom’18:Proceedings of the 24th Annual International Conference on Mobile Computing and Networking.[S.l.:s.n.], 2018: 115-127. |
| [20] | 董超, 沈赟, 屈毓锛 . 基于无人机的边缘智能计算研究综述[J]. 智能科学与技术学报, 2020,2(3): 227-239. |
| DONG C , SHEN Y , QU Y B . A survey of UAV-based edge intelligent computing[J]. Chinese Journal of Intelligent Science and Technology, 2020,2(3): 227-239. | |
| [21] | ZISSERMAN A , SIMONYAN , KAREN ,et al. Very deep convolutional networks for large-scale image recognition[J]. arXiv:1409.1556, 2014. |
| [22] | SZEGEDY C , LIU W , JIA Y Q ,et al. Going deeper with convolutions[C]// 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway:IEEE Press, 2015: 1-9. |
| [23] | HE K M , ZHANG X Y , REN S Q ,et al. Deep residual learning for image recognition[C]// 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway:IEEE Press, 2016: 770-778. |
| [24] | HE K M , ZHANG X Y , REN S Q ,et al. Spatial pyramid pooling in deep convolutional networks for visual recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015,37(9): 1904-1916. |
| [25] | SHAN S , DEY D , LOVETT C ,et al. Airsim:high-fidelity visual and physical simulation for autonomousvehicles[J]. Field and Service Robotics, 2018: 621-635. |
| [26] | YU H H , WINKLER S . Image complexity and spatial information[C]// 2013 5th International Workshop on Quality of Multimedia Experience (QoMEX). Piscataway:IEEE Press, 2013: 12-17. |
| [27] | PERLIO J , HYVARINEN A . Modelling image complexity by independent component analysis,with application to content-based image retrieval[J]. International Conferenceon Artificial Neural Networks, 2009: 704-714. |
| [28] | ROMERO J , MACHADO P , CARBALLAL A ,et al. Using complexity estimates in aesthetic image classification[J]. Journal of Mathematics and the Arts, 2012,6(2/3): 125-136. |
| [29] | KAZAKOVA N , MARGALA M , DURDLE N G . Sobel edge detection processor for a real-time volume rendering system[C]// 2004 IEEE International Symposium on Circuits and Systems. Piscataway:IEEE Press, 2004. |
| [30] | AWATE Y P , . Policy-gradient based actor-critic algorithms[C]// 2009 WRI Global Congress on Intelligent Systems. Piscataway:IEEE Press, 2009: 505-509. |
| [31] | PALACIN J , PALLEJA T , VALGANON I ,et al. Measuring coverage performances of a floor cleaning mobile robot using a vision system[C]// Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 2005: 4236-4241. |
| [1] | 王志宏, 冷甦鹏, 熊凯. 面向无人机集群协同感知的多智能体资源分配策略[J]. 物联网学报, 2023, 7(1): 18-26. |
| [2] | 江恺, 曹越, 周欢, 任学锋, 朱永东, 林海. 车联网边缘智能:概念、架构、问题、实施和展望[J]. 物联网学报, 2023, 7(1): 37-48. |
| [3] | 张志飞, 刘峰, 葛祎阳, 李烁, 张煜, 熊轲. 一种基于深度可分离卷积和注意力机制的入侵检测方法[J]. 物联网学报, 2023, 7(1): 49-59. |
| [4] | 廖岑卉珊, 陈俊彦, 梁观平, 谢小兰, 卢小烨. 基于深度强化学习的SDN服务质量智能优化算法[J]. 物联网学报, 2023, 7(1): 73-82. |
| [5] | 蒋锐, 孙刘婷, 王小明, 李大鹏, 徐友云. 基于AE和Transformer的运动想象脑电信号分类研究[J]. 物联网学报, 2023, 7(1): 118-128. |
| [6] | 张彪, 汪西明, 徐逸凡, 李文, 韩昊, 刘松仪, 陈学强. 基于多智能体深度强化学习的多域协同抗干扰方法研究[J]. 物联网学报, 2022, 6(4): 104-116. |
| [7] | 张欢欢, 周安福, 马华东. 基于强化学习的实时视频流控与移动终端训练方法研究[J]. 物联网学报, 2022, 6(4): 1-13. |
| [8] | 李贤, 毕宿志, 曾泓儒, 林彬, 林晓辉. 基于智能化用户协作的边缘计算任务卸载与资源分配优化[J]. 物联网学报, 2022, 6(4): 41-52. |
| [9] | 郅佳琳, 滕颖蕾, 张新阳, 牛涛, 宋梅. 基于DNN卷积核分割的边缘协作推理性能分析[J]. 物联网学报, 2022, 6(4): 72-81. |
| [10] | 陈九九, 郭彩丽, 冯春燕, 刘传宏. 智能网联环境下面向语义通信的资源分配[J]. 物联网学报, 2022, 6(3): 47-57. |
| [11] | 俞汉清, 林艳, 贾林琼, 李强, 张一晋. 面向多目标救援的通信受限无人机集群分布式策略[J]. 物联网学报, 2022, 6(3): 103-112. |
| [12] | 李茜雯, 陈健锋, 崔苗, 张广驰. 可充电无人机辅助数据采集系统的飞行路线与通信调度优化[J]. 物联网学报, 2022, 6(3): 113-123. |
| [13] | 罗丹, 徐茹枝, 关志涛. 物联网环境中基于深度学习的差分隐私预算优化方法[J]. 物联网学报, 2022, 6(2): 65-76. |
| [14] | 徐宣哲, 宁珂, 郑学敏, 赵明心, 徐萌萌, 吴南健, 刘力源. 基于硬件仿真系统的边缘计算人工智能视觉芯片设计验证[J]. 物联网学报, 2022, 6(1): 20-28. |
| [15] | 罗梓珲, 江呈羚, 刘亮, 郑霄龙, 马华东. 基于深度强化学习的智能车间调度方法研究[J]. 物联网学报, 2022, 6(1): 53-64. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
|
||