


Chinese Journal of Intelligent Science and Technology ›› 2019, Vol. 1 ›› Issue (2): 171-180.doi: 10.11959/j.issn.2096-6652.201926
• Regular Papers • Previous Articles Next Articles
Junfeng XIN1( ),Yongbo ZHANG2,Jiageng BO1,Bowen ZHAO1,Shiyuan FAN1
),Yongbo ZHANG2,Jiageng BO1,Bowen ZHAO1,Shiyuan FAN1
Revised:2017-05-25
Online:2019-06-20
Published:2019-09-09
Supported by:CLC Number:
Junfeng XIN, Yongbo ZHANG, Jiageng BO, et al. Study on path planning of unmanned surface vessel based on data-driven genetic algorithm[J]. Chinese Journal of Intelligent Science and Technology, 2019, 1(2): 171-180.
"

"

"
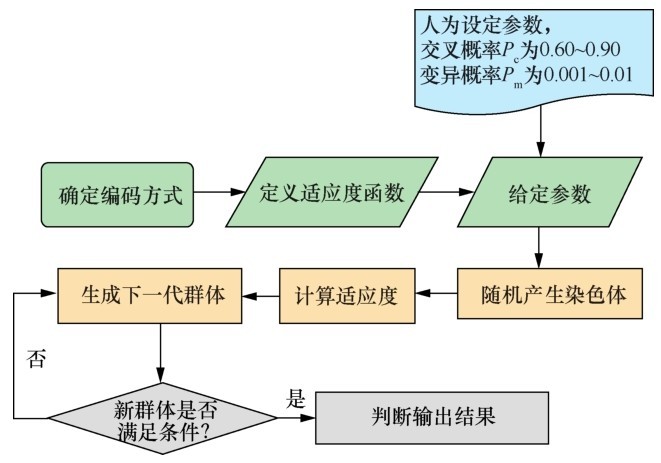
| 种群大小N | 交叉概率Pc | 变异概率Pm | 最大迭代次数(次) |
| 传统算法100 | 0.90 | 0.10 | 1000 |
| 改进算法100 | — | — | 1000 |

"
"
"
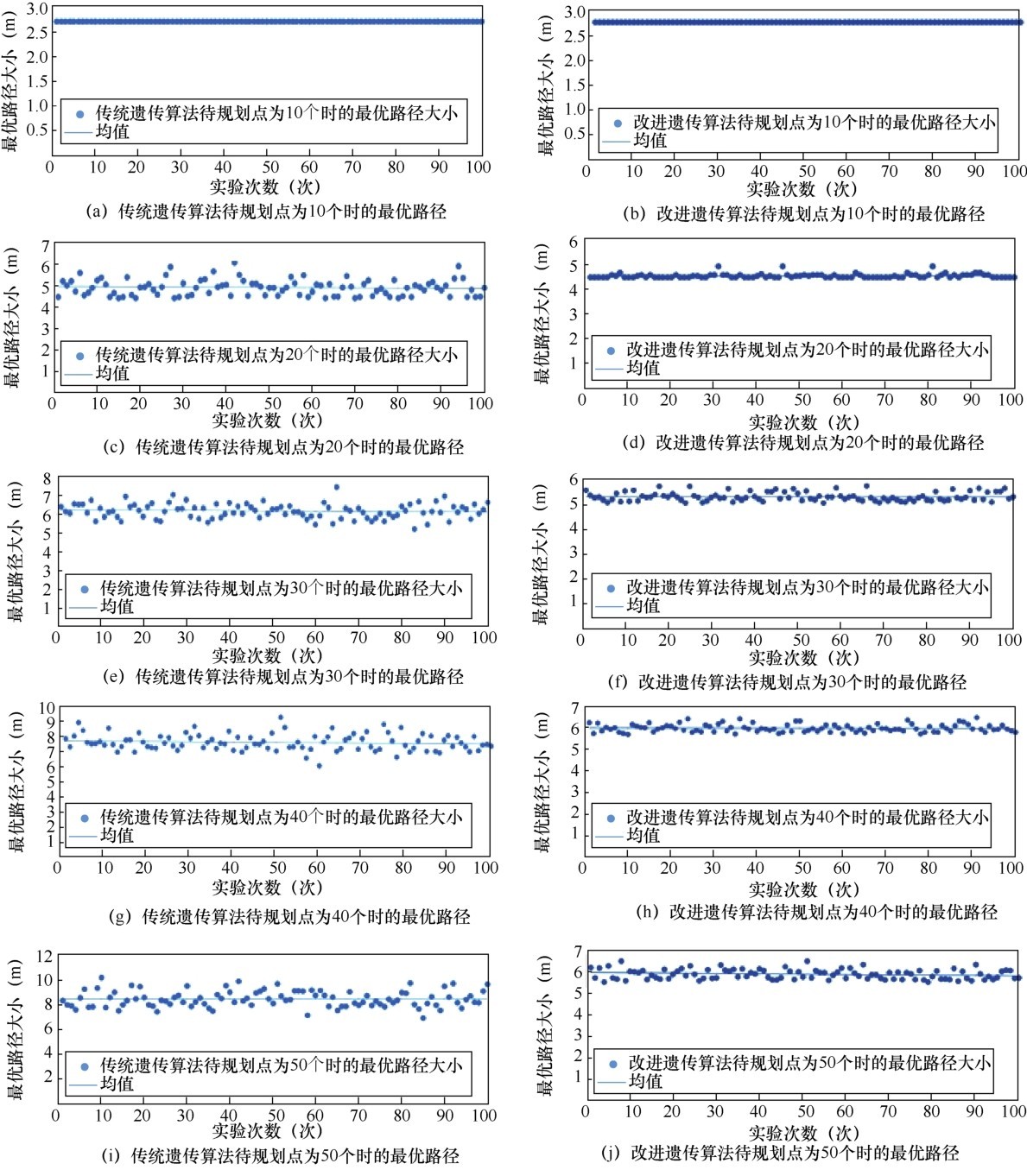
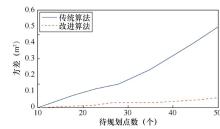
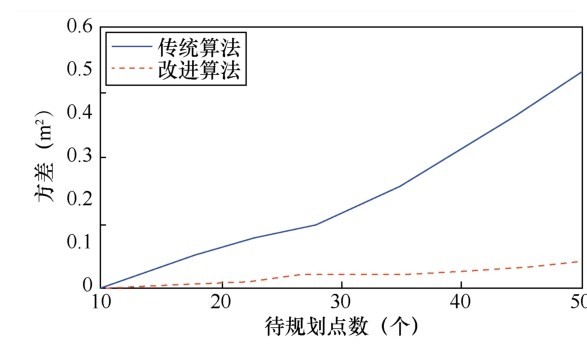
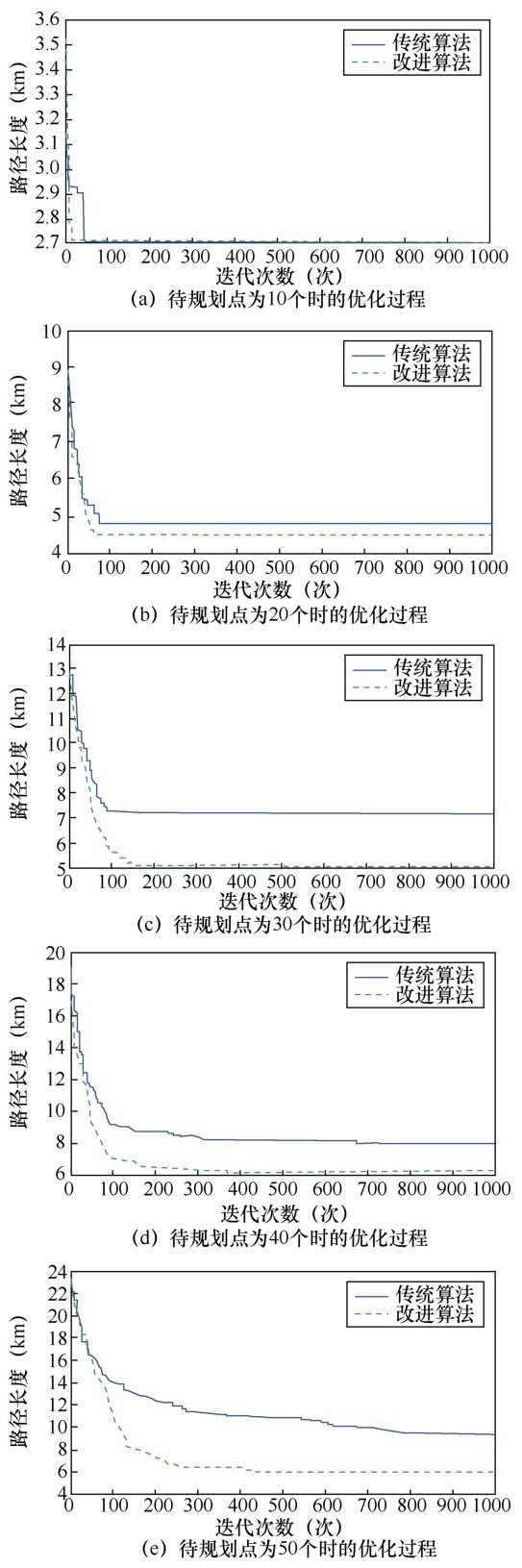
| 点数(个) | 平均值(m) | 方差(m2) | ||||
| 传统算法 | 改进算法 | 相对误差 | 传统算法 | 改进算法 | 相对误差 | |
| 10 | 2.705 | 2.705 | 0.000 | 0.000% | 0.000 | 0.000% |
| 20 | 4.879 | 4.467 | -8.444 | 0.092% | 0.006 | -93.478% |
| 30 | 6.198 | 5.223 | -15.73 | 0.166% | 0.031 | -81.325% |
| 40 | 7.598 | 5.937 | -21.86 | 0.312% | 0.035 | -88.782% |
| 50 | 8.414 | 5.884 | -30.07 | 0.491% | 0.054 | -89.002% |
"
"
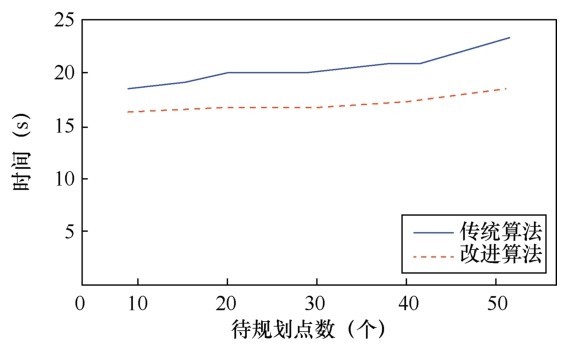
| 点数(个) | 传统算法(s) | 改进算法(s) | 相对误差 |
| 10 | 18.645 | 16.214 | -13.040% |
| 20 | 19.665 | 16.691 | -15.123% |
| 30 | 20.112 | 16.865 | -16.145% |
| 40 | 21.044 | 17.139 | -18.556% |
| 50 | 23.206 | 18.362 | -20.874% |
"
"
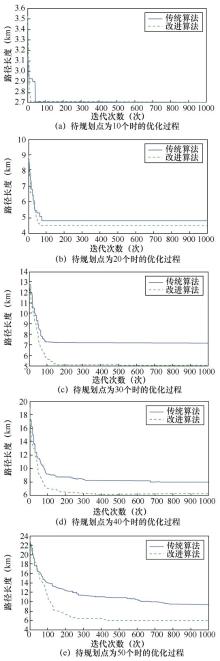
| 点数(个) | 传统算法(次) | 改进算法(次) | 相对误差 |
| 10 | 52 | 20 | -61.538% |
| 20 | 83 | 62 | -25.301% |
| 30 | 98 | 154 | 57.143% |
| 40 | 723 | 386 | -46.611% |
| 50 | 869 | 587 | -32.451% |

"

"
"

"

"
| 天气现象 | 风向 | 风力(级) | 浪高(m) | 能见度(km) |
| 多云 | 北风 | 3~4 | 1 | 12 |

"

"
| 坐标序号 | 纬度 | 经度 |
| 1 | N36°03′ 22.38′′ | E120°22′ 57.06′′ |
| 2 | N36°03′ 21.94′′ | E120°23′ 11.96′′ |
| 3 | N36°03′ 9.95′′ | E120°23′ 6.15′′ |
| 4 | N36°03′ 38.43′′ | E120°22′ 55.51′′ |
| 5 | N36°03′ 11.26′′ | E120°22′ 56.27′′ |
| 6 | N36°03′ 9.76′′ | E120°23′ 5.38′′ |
| 7 | N36°03′ 20.26′′ | E120°22′ 58.45′′ |
| 8 | N36°03′ 2.14′′ | E120°23′ 17.12′′ |
| 9 | N36°03′ 6.57′′ | E120°23′ 24.70′′ |
| 10 | N36°03′ 8.45′′ | E120°23′ 10.63′′ |
"
"
"
| 传统算法 | 改进算法 | 相对误差 | |
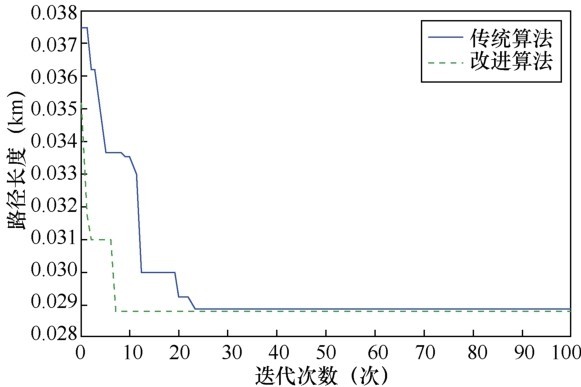
| 最优解距离(km) | 0.038 | 0.037 | -2.631% |
| 用时(s) | 5.666 | 4.807 | -15.160% |
"
| 坐标序号 | 纬度 | 经度 |
| 1 | N36°03′22.38″ | E120°22′57.06″ |
| 2 | N36°03′21.94″ | E120°23′11.96″ |
| 3 | N36°03′9.95″ | E120°23′06.15″ |
| 4 | N36°03′38.43″ | E120°22′55.51″ |
| 5 | N36°03′11.26″ | E120°22′56.27″ |
| 6 | N36°03′09.76″ | E120°23′05.38″ |
| 7 | N36°03′20.26″ | E120°22′58.45″ |
| 8 | N36°03′02.14″ | E120°23′17.12″ |
| 9 | N36°03′06.57″ | E120°23′24.70″ |
| 10 | N36°03′08.45″ | E120°23′10.63″ |
| 11 | N36°03′12.20″ | E120°23′08.70″ |
| 12 | N36°03′11.14″ | E120°23′12.10″ |
| 13 | N36°03′09.95″ | E120°23′00.67″ |
| 14 | N36°03′27.69″ | E120°23′13.90″ |
| 15 | N36°03′17.70″ | E120°23′08.02″ |
| 16 | N36°03′16.82″ | E120°23′13.03″ |
| 17 | N36°03′16.26″ | E120°23′18.20″ |
| 18 | N36°03′31.62″ | E120°23′11.66″ |
| 19 | N36°03′25.82″ | E120°23′08.26″ |
| 20 | N36°03′15.32″ | E120°23′04.92″ |
| 21 | N36°03′44.86″ | E120°23′54.46″ |
| 22 | N36°03′28.53″ | E120°23′47.99″ |
| 23 | N36°03′24.43″ | E120°23′59.50″ |
| 24 | N36°03′27.32″ | E120°23′54.61″ |
| 25 | N36°03′24.44″ | E120°23′59.50″ |
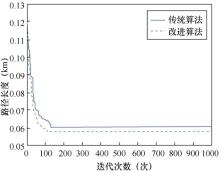
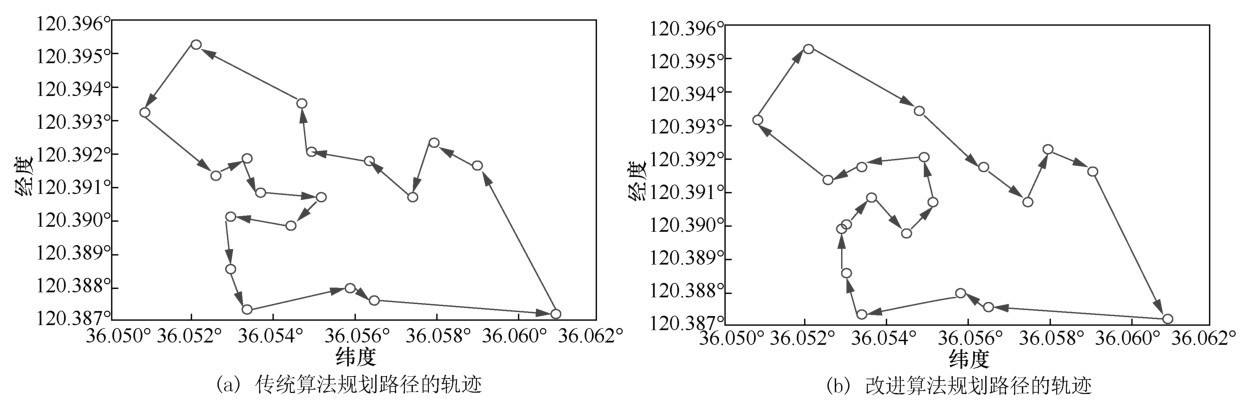
"
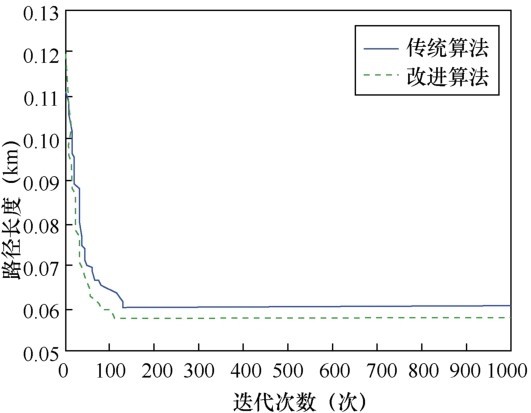

"
"
| 传统算法 | 改进算法 | 相对误差 | |
| 最优解距离(km) | 0.061 | 0.057 | -6.557% |
| 用时(s) | 18.961 | 16.538 | -12.779% |
"
| 坐标序号 | 纬度 | 经度 |
| 1 | N36°03′22.38″ | E120°22′57.06″ |
| 2 | N36°03′21.94″ | E120°23′11.96″ |
| 3 | N36°03′09.95″ | E120°23′06.15″ |
| 4 | N36°03′38.43″ | E120°22′55.51″ |
| 5 | N36°03′11.26″ | E120°22′56.27″ |
| 6 | N36°03′09.76″ | E120°23′05.38″ |
| 7 | N36°03′20.26″ | E120°22′58.45″ |
| 8 | N36°03′02.14″ | E120°23′17.12″ |
| 9 | N36°03′06.57″ | E120°23′24.70″ |
| 10 | N36°03′08.45″ | E120°23′10.63″ |
| 11 | N36°03′12.20″ | E120°23′08.70″ |
| 12 | N36°03′11.14″ | E120°23′12.10″ |
| 13 | N36°03′09.95″ | E120°23′00.67″ |
| 14 | N36°03′27.69″ | E120°23′13.90″ |
| 15 | N36°03′17.70″ | E120°23′08.02″ |
| 16 | N36°03′16.82″ | E120°23′13.03″ |
| 17 | N36°03′16.26″ | E120°23′18.20″ |
| 18 | N36°03′31.62″ | E120°23′11.66″ |
| 19 | N36°03′25.82″ | E120°23′08.26″ |
| 20 | N36°03′15.32″ | E120°23′04.92″ |
| 21 | N36°03′44.85" | E120°23′54.46" |
| 22 | N36°03′28.52" | E120°23′47.98" |
| 23 | N36°03′24.43" | E120°23′59.49" |
| 24 | N36°03′27.32" | E120°23′54.61" |
| 25 | N36°03′24.44" | E120°23′59.49" |
| 26 | N36°03′25.98" | E120°24′19.16" |
| 27 | N36°03′24.44" | E120°23′59.49" |
| 28 | N36°03′34.67" | E120°23′54.48" |
| 29 | N36°03′26.06" | E120°24′15.69" |
| 30 | N36°03′36.45" | E120°23′41.22" |
| 31 | N36°03′28.29" | E120°23′42.87" |
| 32 | N36°03′27.26" | E120°23′55.84" |
| 33 | N36°03′37.42" | E120°23′43.61" |
| 34 | N36°03′24.64" | E120°24′04.51" |
| 35 | N36°03′28.05" | E120°24′07.45" |
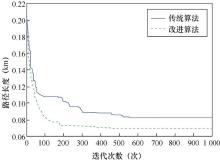
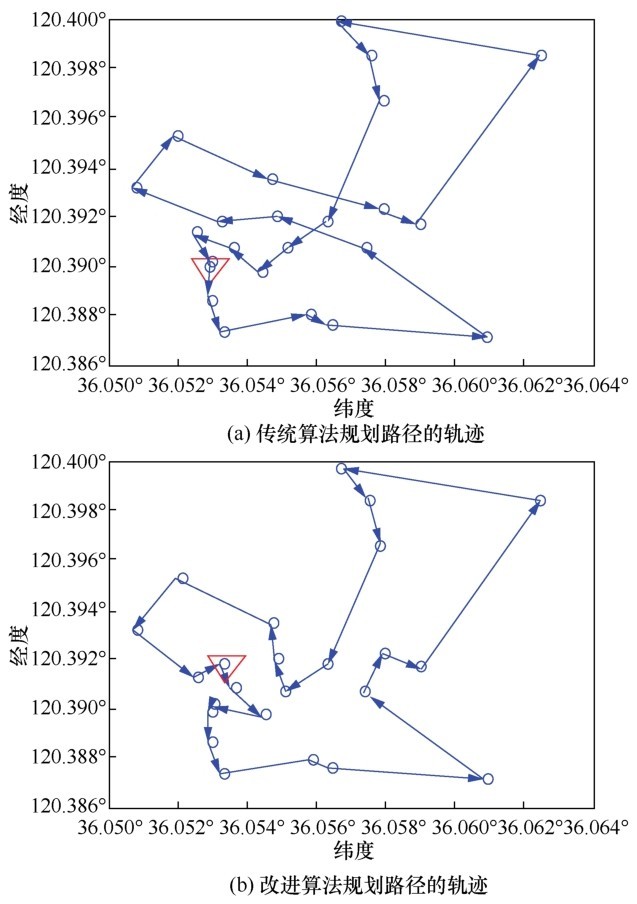
"
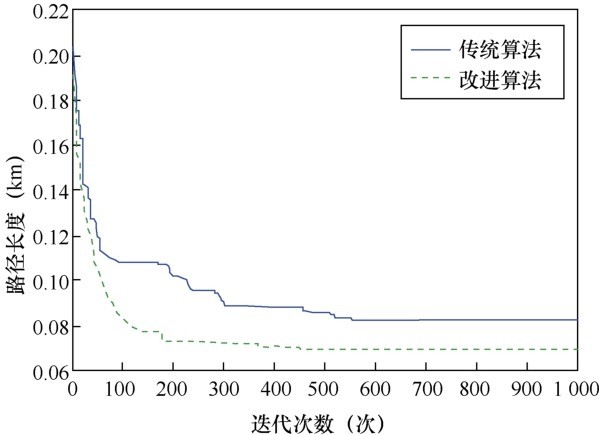

"

"
| 传统算法 | 改进算法 | 相对误差 | |
| 最优解距离(km) | 0.083 | 0.069 | -16.867% |
| 用时(s) | 19.161 | 17.698 | -7.635% |
| [1] | GOLDBERG D E . Genetic algorithms in search,optimization and machine learning[M]. Addison-Wesley Pub.Co. 1989: 2104-2116. |
| [2] | SRINIVAS M , PATNAIK L M . Adaptive probabilities of crossover and mutation in genetic algorithms[J]. IEEE Transactions on Systems Man & Cybernetics, 2002,24(4): 656-667. |
| [3] | 郑南宁 . 人工智能新时代[J]. 智能科学与技术学报, 2019,1(1): 1-3. |
| ZHENG N N . The new era of artificial intelligence[J]. Chinese Journal of Intelligent Science and Technology, 2019,1(1): 1-3. | |
| [4] | 张钹 . 人工智能进入后深度学习时代.智能科学与技术学报[J]. 2019,1(1): 4-6. |
| ZHANG B . Artificial intelligence is entering the post deep-learning era[J]. Chinese Journal of Intelligent Science and Technology, 2019,1(1): 4-6. | |
| [5] | 郑亚君, 薛磊, 董璐 ,等. 基于 UWB 定位技术的多移动机器人编队控制.智能科学与技术学报[J]. 2019,1(1): 83-87. |
| ZHENG Y J , XUE L , DONG L ,et al. Formation control of mobile robots with UWB localization technology[J]. Chinese Journal of Intelligent Science and Technology, 2019,1(1): 83-87. | |
| [6] | CHANG W A , RAMAKRISHNA R S . A genetic algorithm for shortest path routing problem and the sizing of populations[M]. IEEE Press, 2002. |
| [7] | HAUPT R L , HAUPT S E . Practical Genetic Algorithms,Second Edition[M]. 2004. |
| [8] | TSAI C C , HUANG H C , CHAN C K . Parallel elite genetic algorithm and its application to global path planning for autonomous robot navigation[J]. IEEE Transactions on Industrial Electronics, 2011,58(10): 4813-4821. |
| [9] | TUNCER A , YILDIRIM M . Dynamic path planning of mobile robots with improved genetic algorithm[J]. Computers & Electrical Engineering, 2012,38(6): 1564-1572. |
| [10] | ELSHAMLI A , ABDULLAH H A , AREIBI S . Genetic algorithm for dynamic path planning[C]// Canadian Conference on Electrical and Computer Engineering. 2004: 677-680. |
| [11] | MANELY J E , . Unmanned surface vehicles,15 years of development[C]// Proc.Oceans 2008 MTS/IEEE Quebec Conference Exhibition. 2008: 1-4. |
| [12] | VEERS J , BERTRAN V . Development of the USV multi-mission surface vehicle III[C]// 5th Int.Computer and IT Application in the Maritime Industries. 2006: 345-355. |
| [13] | LU Y S . Research on the path planning algorithm for the surface of the surface[D]. Harbin:Harbin Engineering University, 2010. |
| [14] | RATNAWEERA A , HALGAMUGE S K , WATSON H C . Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficients[J]. IEEE Transactions on Evolutionary Computation, 2004,8(3): 240-255. |
| [15] | HOLLAND J H . Adaptation in natural and artificial systems[J]. Quarterly Review of Biology, 1975,6(2): 126-137. |
| [16] | LIANG J Y . Some common problems in the application of genetic algorithm[J]. Computer Application Research, 1999(7): 20-21. |
| [17] | HOLLAND J H . Outline for a logic theory of adaptive systems[J]. Journal of the Association for Computing Machinery, 1962,9(3): 297-314. |
| [18] | SAMADI M , OTHMAN M F . Global path planning for autonomous mobile robot using genetic algorithm[C]// International Conference on Signal-Image Technology & Internet-Based Systems. 2013: 726-730. |
| [19] | LEE J , KIM D W . An effective initialization method for genetic algorithm-based robot path planning using a directed acyclic graph[J]. Information Sciences, 2015:332. |
| [1] | Jiaxin ZHANG, Senlin ZHANG, Meiqin LIU, Shanling DONG, Ronghao ZHENG. Multi-AUV cooperative localization in adaptive sampling for marine environmental monitoring [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(4): 503-512. |
| [2] | Zhou YU, Jing BI, Haitao YUAN. A path planning method for complex naval battle field based on an improved DQN algorithm [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(3): 418-425. |
| [3] | Yuqian WANG, Rong DING. Automatic path planning program generation system based on swarm intelligence results [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(2): 255-263. |
| [4] | Lu DONG, Ailing XIONG. Path planning for unmanned surface vehicle in complex dynamic environment based on improved RRT*-Smart [J]. Chinese Journal of Intelligent Science and Technology, 2022, 4(2): 264-276. |
| [5] | Teng WANG, Jing PAN, Lu DONG, Changyin SUN. Key technologies and applications of intelligent guiding robots for epidemic prevention [J]. Chinese Journal of Intelligent Science and Technology, 2021, 3(2): 187-194. |
| [6] | Hongqing DU,Dewang CHEN,Yunhu HUANG,Fenghua ZHU,Lingxi LI. A fuzzy system optimization modeling method based on improved genetic algorithm and support degree [J]. Chinese Journal of Intelligent Science and Technology, 2020, 2(2): 179-185. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
|
||